Robot Machining
Introducción
Este ejemplo le ayudará a comprender los conceptos básicos del mecanizado robotizado en RoboDK y cómo convertir un trabajo de mecanizado robotizado de 3 ejes en una simulación de mecanizado robotizado y un programa de robot.
Una vez que haya definido su estrategia de mecanizado con su software CAM, puede exportar su programa de mecanizado como un Gcode o como un archivo APT para poder cargarlo en RoboDK y crear un proyecto de mecanizado de robot. En este ejemplo, utilizaremos un archivo APT para crear un proyecto de mecanizado de robot.
Puede encontrar este proyecto RoboDK de ejemplo en la siguiente ubicación C:/RoboDK/Other/Plugin-MecSoft/Mold-Core.rdk.
Ejemplo de mecanizado robotizado (3 ejes)
En este ejemplo, aprenderá a convertir un programa de mecanizado en una simulación de mecanizado de robot y en un programa de robot. Más concretamente, aprenderá a generar programas de robot válidos para su controlador de robot a partir de archivos NC como un archivo APT.
Programa de mecanizado en RhinoCAM
Esta sección muestra cómo puede exportar un trabajo de mecanizado desde el software RhinoCAM de Mecsoft a RoboDK. Se utiliza un archivo APT para cargar la trayectoria de la herramienta en RoboDK y se envía automáticamente utilizando un archivo BAT personalizado.
Siga estos pasos en RhinoCAM para exportar el trabajo de mecanizado a RoboDK:
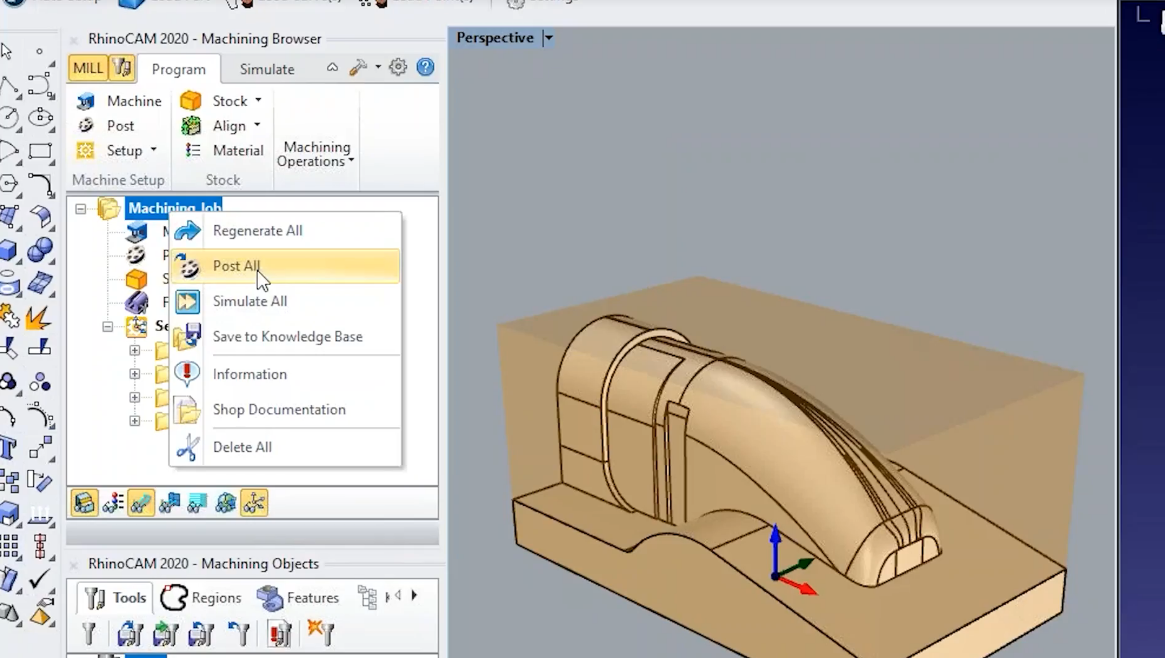
1.Haga clic con el botón derecho en su proyecto de trabajo de mecanizado desde RhinoCAM.
2.Seleccione Publicar todo para generar los programas de mecanizado y cargarlo todo automáticamente en RoboDK.
Puede ver que RoboDK divide automáticamente el programa de mecanizado del robot en las mismas 4 operaciones de mecanizado que creamos en el software CAM.
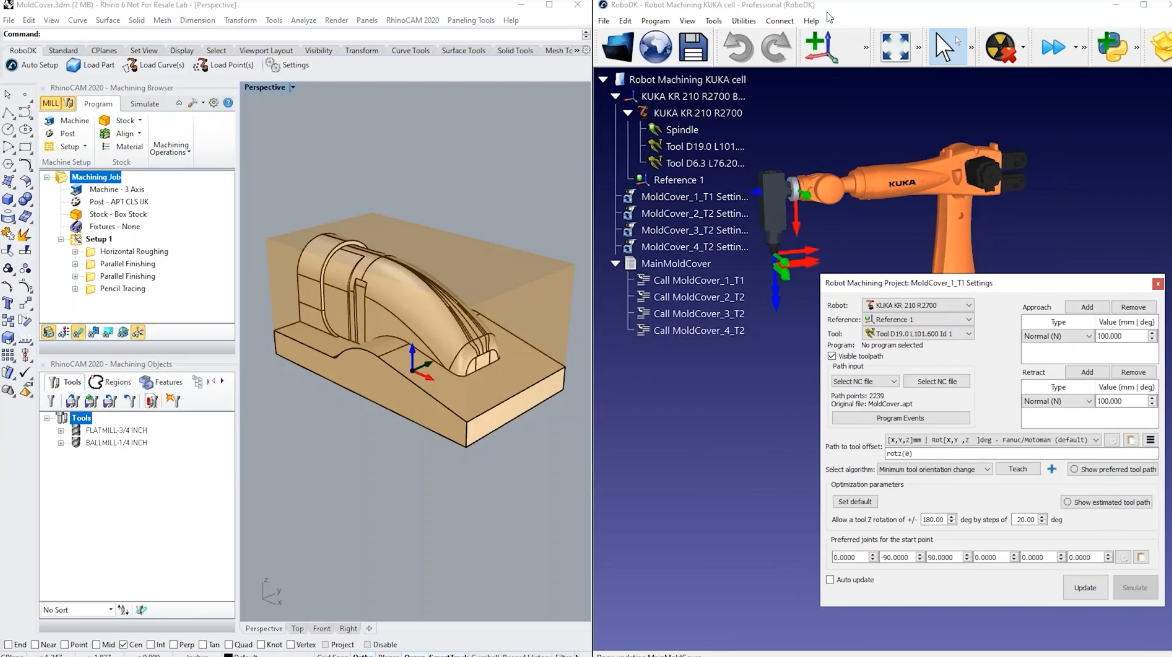
El proyecto de mecanizado del robot se crea utilizando una célula de robot predeterminada que podemos personalizar. En este ejemplo utilizamos un robot KUKA y un husillo por defecto en el que la herramienta (o TCP) representa el portaherramientas.
Por defecto, al cargar programas APT, RoboDK añadirá las herramientas que defina en su proyecto de mecanizado. Las herramientas se añadirán a su TCP activo cuando cargue el archivo APT. También se preseleccionarán las herramientas correctas en su proyecto de mecanizado del robot.
Proyecto de mecanizado de robots (3x)
Esta sección muestra cómo personalizar la configuración del robot y la trayectoria de la herramienta de mecanizado para llevar a cabo con éxito el mecanizado del robot. El proyecto de mecanizado de RoboDK le permite convertir cualquier operación de fabricación genérica de 3 o 5 ejes en una simulación de robot y un programa de robot.
Como hemos cargado directamente el archivo de mecanizado, todo se ha creado y seleccionado automáticamente. También podemos personalizar los movimientos de aproximación y retracción en RoboDK.
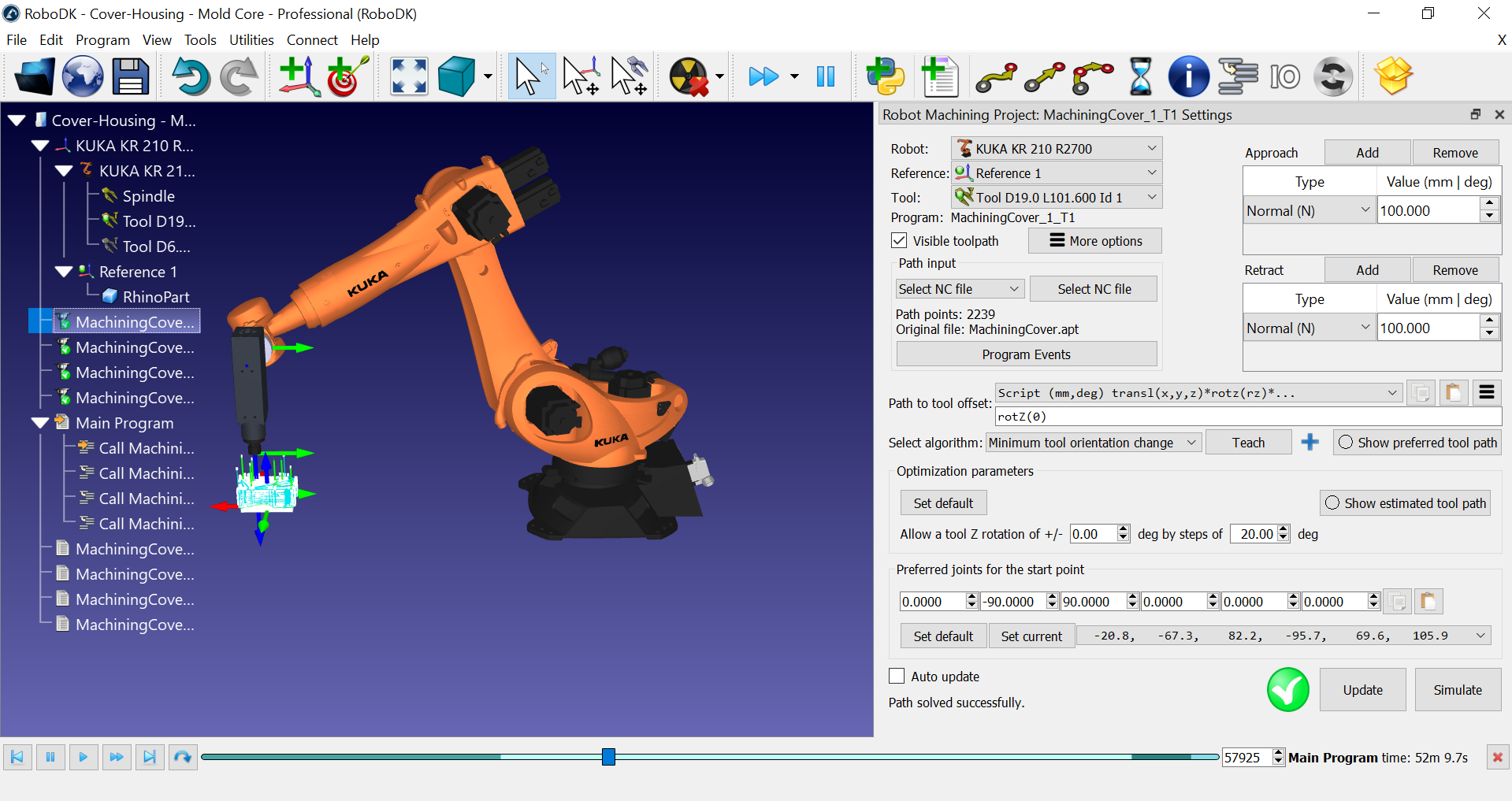
Crear trayectoria de mecanizado de robot
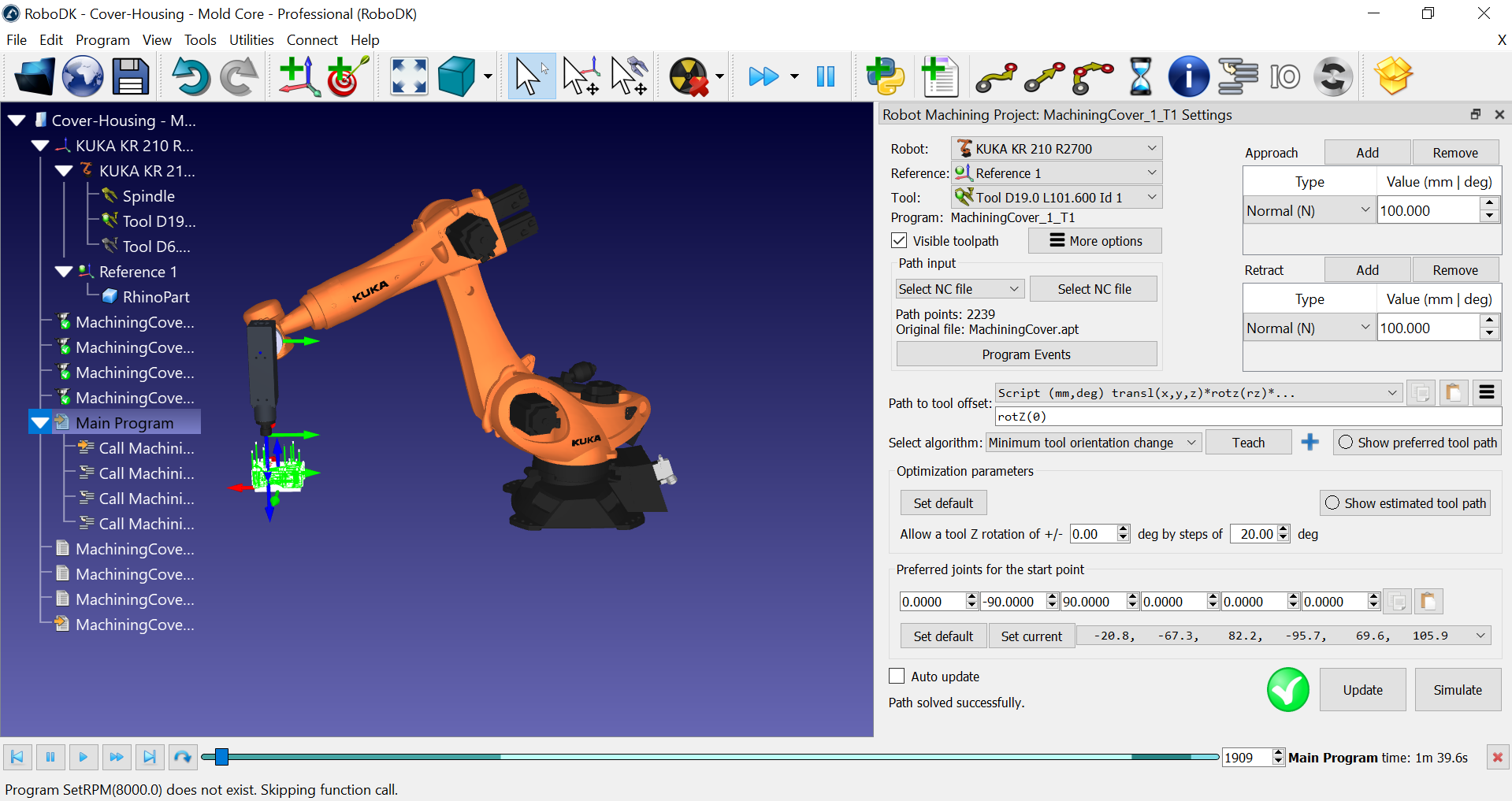
Puede crear la simulación de mecanizado del robot en RoboDK una vez que haya cargado el archivo APT seleccionando Actualizar. Esto le permite ver si el robot puede realizar la operación de fabricación.
Este ejemplo es una simple operación de mecanizado de 3 ejes, y los ajustes por defecto nos dan un resultado válido. El proyecto de mecanizado robotizado le permite controlar cómo se comporta el robot a lo largo de la trayectoria de la herramienta de mecanizado.
Puede seguir estos pasos para actualizar el resto de operaciones de mecanizado del robot:
1.Seleccione una o varias operaciones de mecanizado robotizadas (si mantiene pulsada la tecla Mayús. podrá generar varios elementos en el árbol).
2.Haga clic con el botón derecho del ratón en el elemento o elementos seleccionados.
3.Seleccione Actualizar programas.
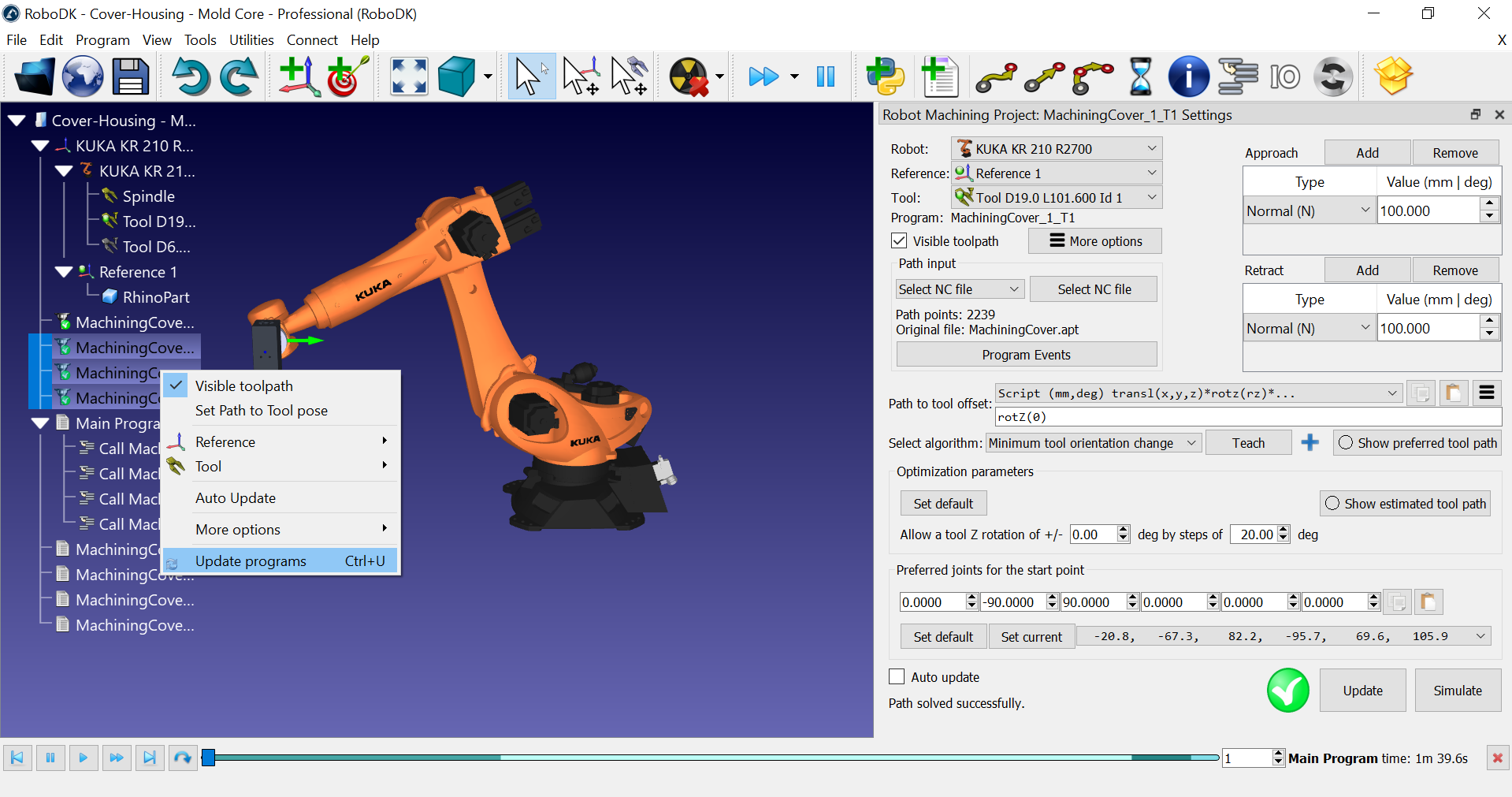
A medida que RoboDK calcula la trayectoria de mecanizado del robot, creará un nuevo programa de robot para cada operación de mecanizado. Los iconos blancos representan programas de robot. Estos programas son creados automáticamente por RoboDK. Puede simular cada programa individualmente haciendo doble clic sobre él en el árbol.
RoboDK también crea automáticamente un programa principal que puede ejecutar para simular todas las operaciones de mecanizado del robot en orden.
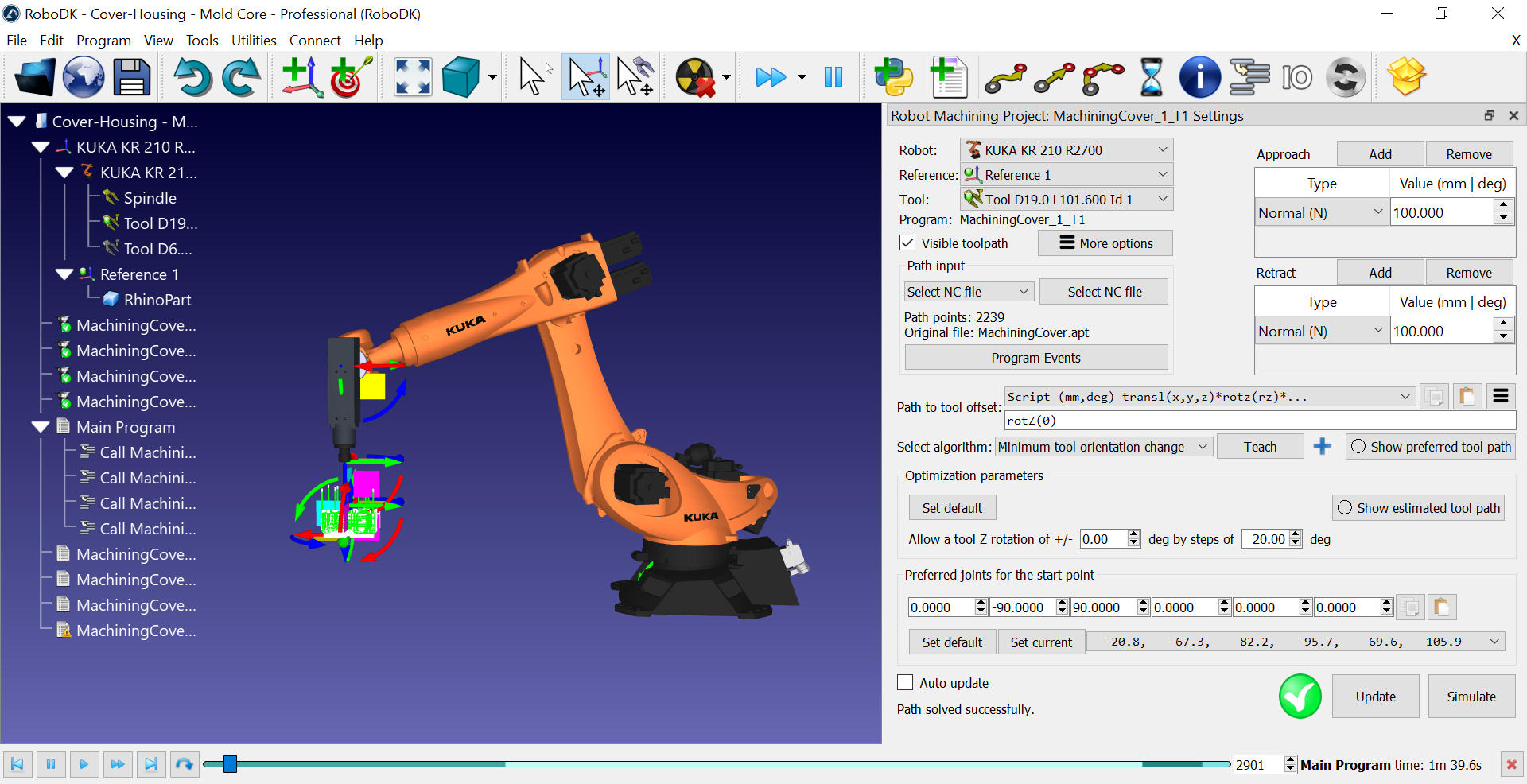
Simular la operación de mecanizado del robot
Puede hacer doble clic en el programa principal para simular toda la operación de mecanizado del robot. También puede hacer doble clic en cualquier subprograma para simularlo.
Personalizar la orientación de la herramienta
La mayoría de las operaciones de mecanizado o fabricación implican una restricción de 5 ejes. Mientras que la posición de la herramienta (TCP) y el eje de corte están definidos, dispone de un grado de libertad adicional para definir cuando utiliza un brazo robótico de 6 ejes. Este grado de libertad nos permite girar alrededor del eje de corte y evitar automáticamente las singularidades y los límites de los ejes.
La forma más sencilla de personalizar la orientación de la herramienta es seleccionando el botón Enseñar en el proyecto de mecanizado del robot. Al seleccionar Enseñar, le está diciendo al RoboDK que desea seguir la orientación actual de la herramienta, de modo que los ajustes se adaptarán para coincidir con esa orientación.
Al seleccionar Mostrar trayectoria de herramienta preferida podemos previsualizar la orientación de la herramienta que el robot intenta seguir.
Puede seleccionar Actualizar y Simular para ver el resultado.
Los parámetros de optimización permiten al robot cambiar automáticamente la orientación de la herramienta si no puede conseguir la orientación preferida. Este parámetro es importante si tiene una pieza grande, si está trabajando cerca de una singularidad o cerca de los límites del espacio de trabajo del robot. Si ve una marca roja significa que el robot no puede realizar la operación.
Si selecciona Mostrar trayectoria estimada de la herramienta debería ver en verde las posiciones que son alcanzables. Le dará una pista sobre cómo será la orientación para que la trayectoria sea factible. Esto significa que estamos utilizando el grado de libertad adicional para evitar automáticamente las singularidades del robot y los límites de los ejes.
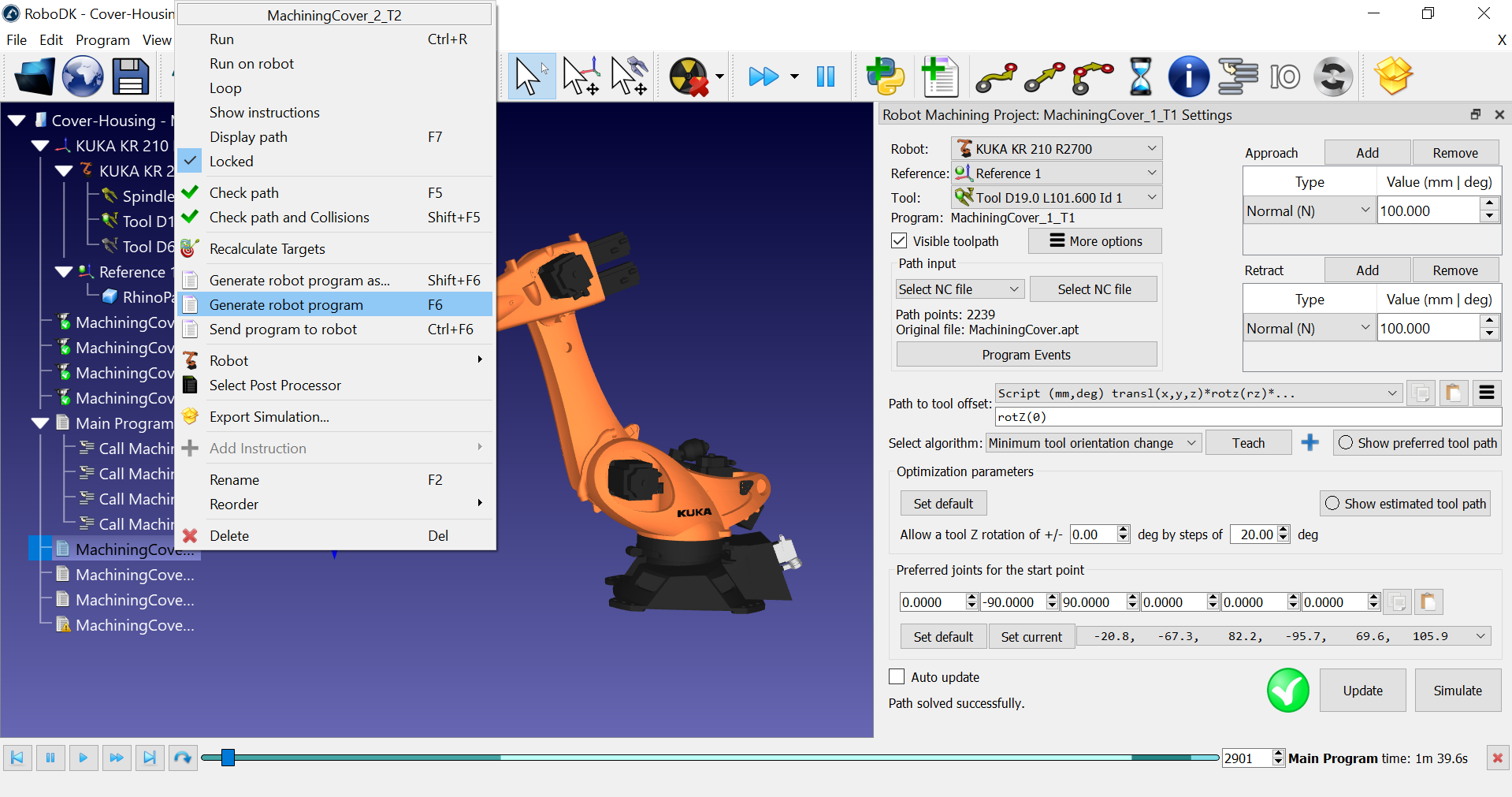
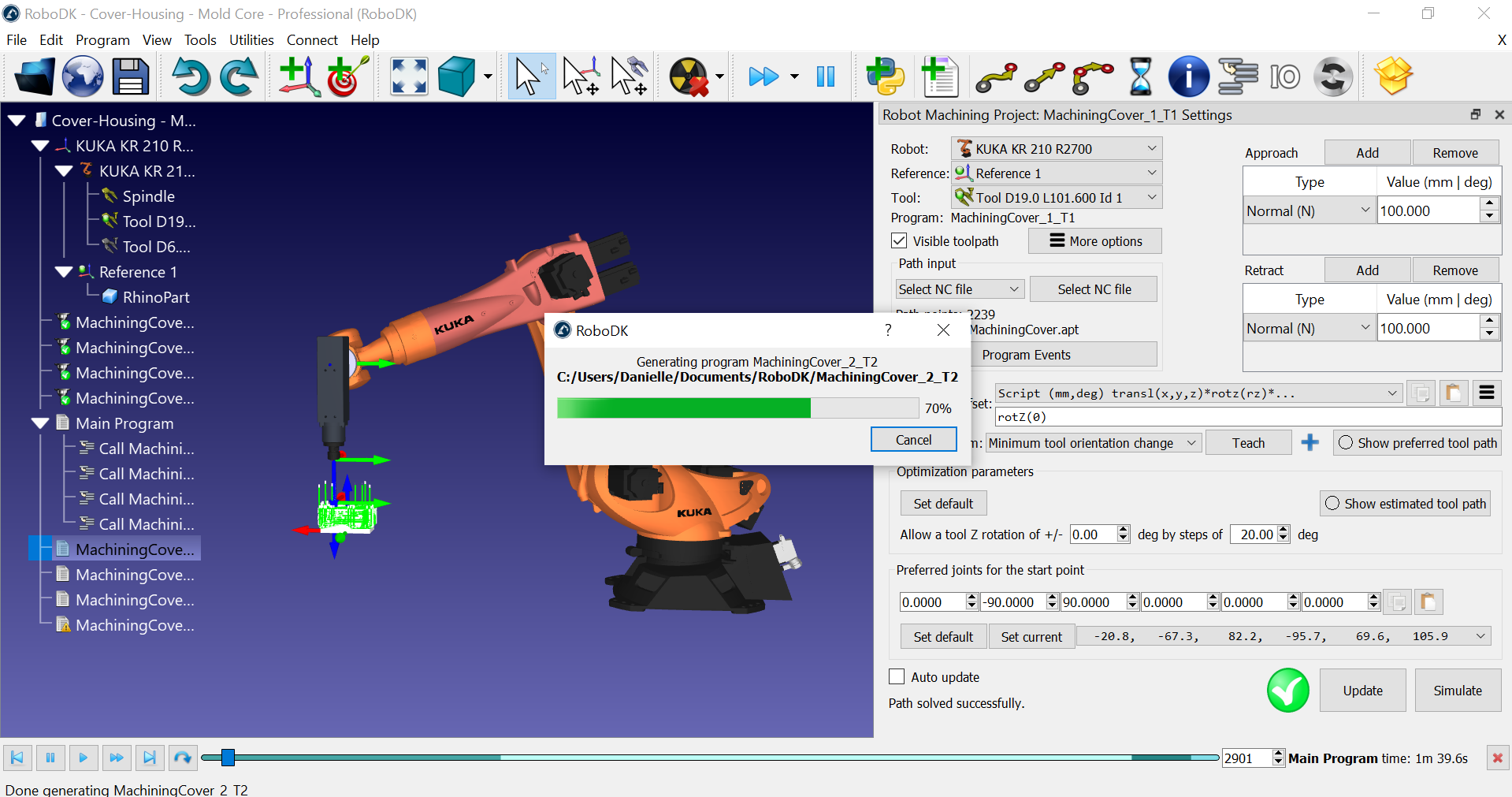
Generar los programas del robot
Puede hacer clic con el botón derecho en uno o varios programas y seleccionar Generar los programas del robot para generar o actualizar los programas (archivos) del robot para su controlador de robot.
En este ejemplo, si estamos utilizando un controlador de robot KUKA KRC obtendremos archivos de programa SRC.
Debería ver la referencia y la herramienta definidas en el programa de la misma forma que las definió en RoboDK.
También puede utilizar la referencia numerada y los nombres de las herramientas para utilizar los valores almacenados en el controlador dado su ID.
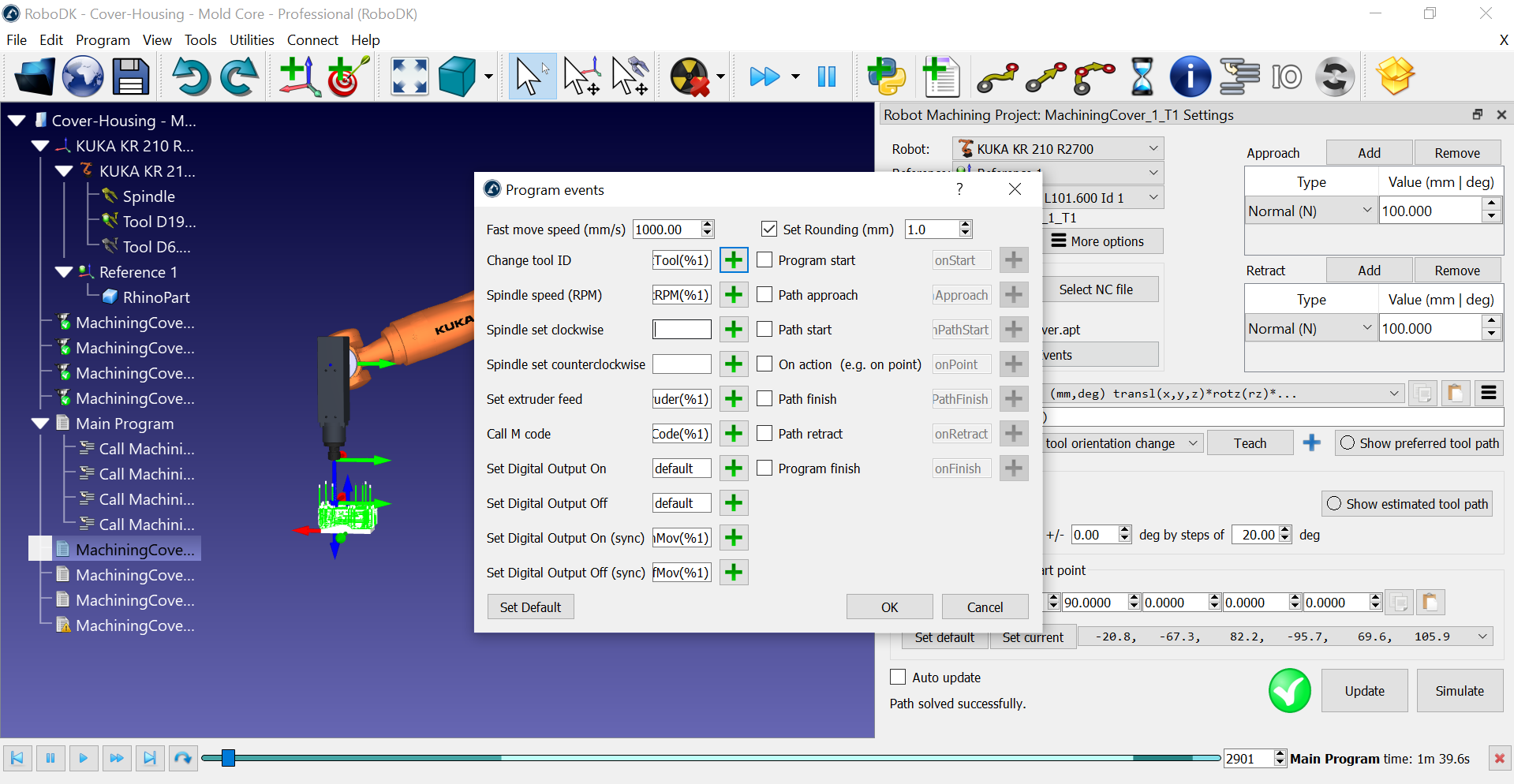
Puede ver llamadas de programa personalizadas para seleccionar la herramienta correcta según su ID de herramienta y activar el husillo. Estos ajustes pueden personalizarse en el menú Eventos de programa. Puede activar un procedimiento especial en el controlador de su robot cuando deba ejecutarse un determinado comando de mecanizado, como cambiar la herramienta, la velocidad del husillo o ejecutar códigos M.
Cambiar el postprocesador
Cada robot tiene asociado un postprocesador por defecto que debería generar un código válido para su controlador de robot. Puede cambiar fácilmente la salida del programa en función del controlador de robot que utilice.
Siga estos pasos para cambiar el postprocesador:
1.Haga clic con el botón derecho del ratón sobre un programa o un robot.
2.Seleccione Seleccionar postprocesador para cambiar el postprocesador.
Este ajuste se aplicará a todos los programas que utilicen el mismo robot.
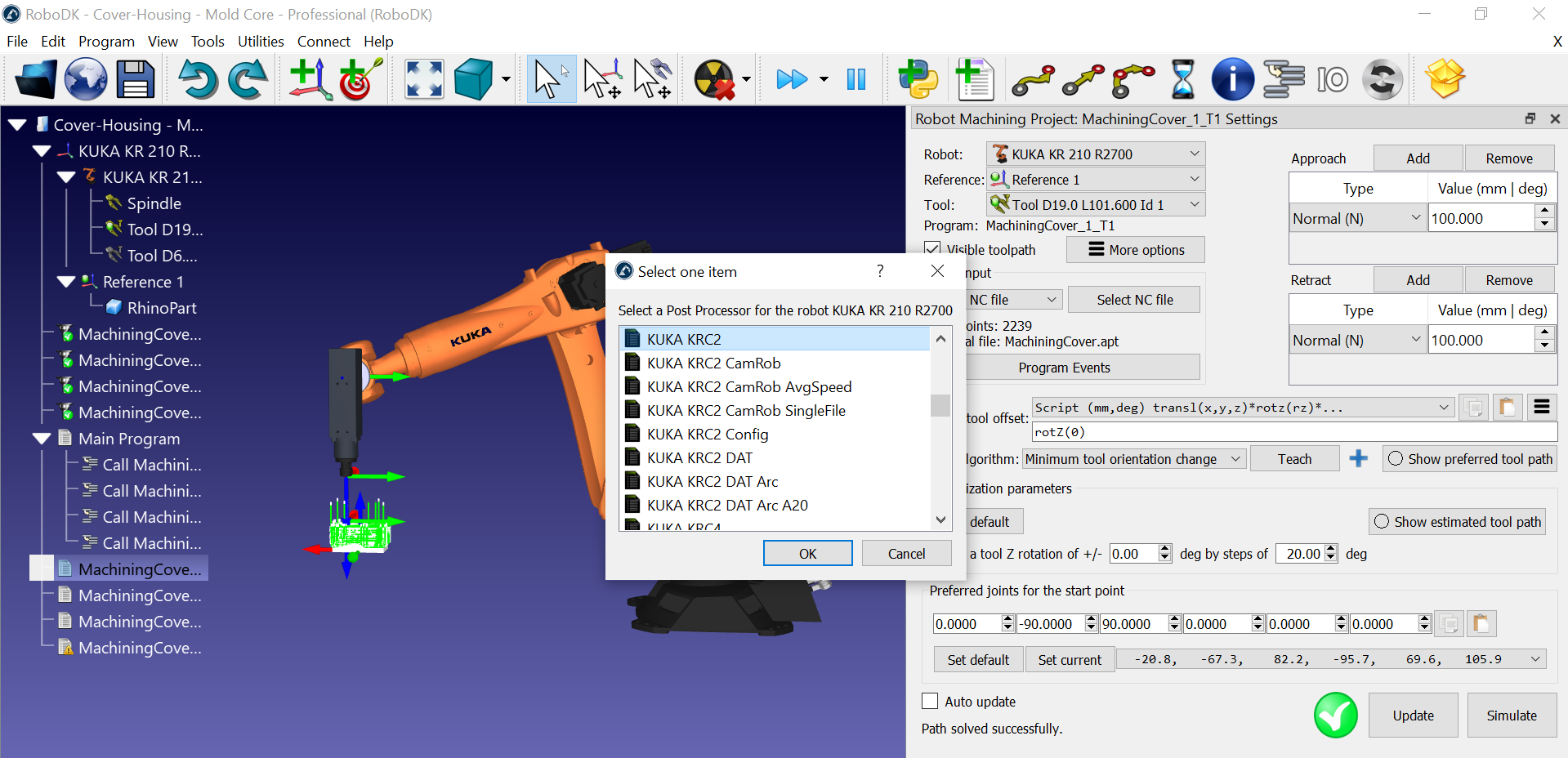
Si tiene un robot KUKA, debería ver seleccionado por defecto el postprocesador KUKA KRC2. Esto también debería ser compatible con los controladores KUKA KRC4. Si lo prefiere, puede seguir seleccionando el postprocesador KUKA KRC4 si tiene un controlador KRC4.