Robot de corte en RoboDK
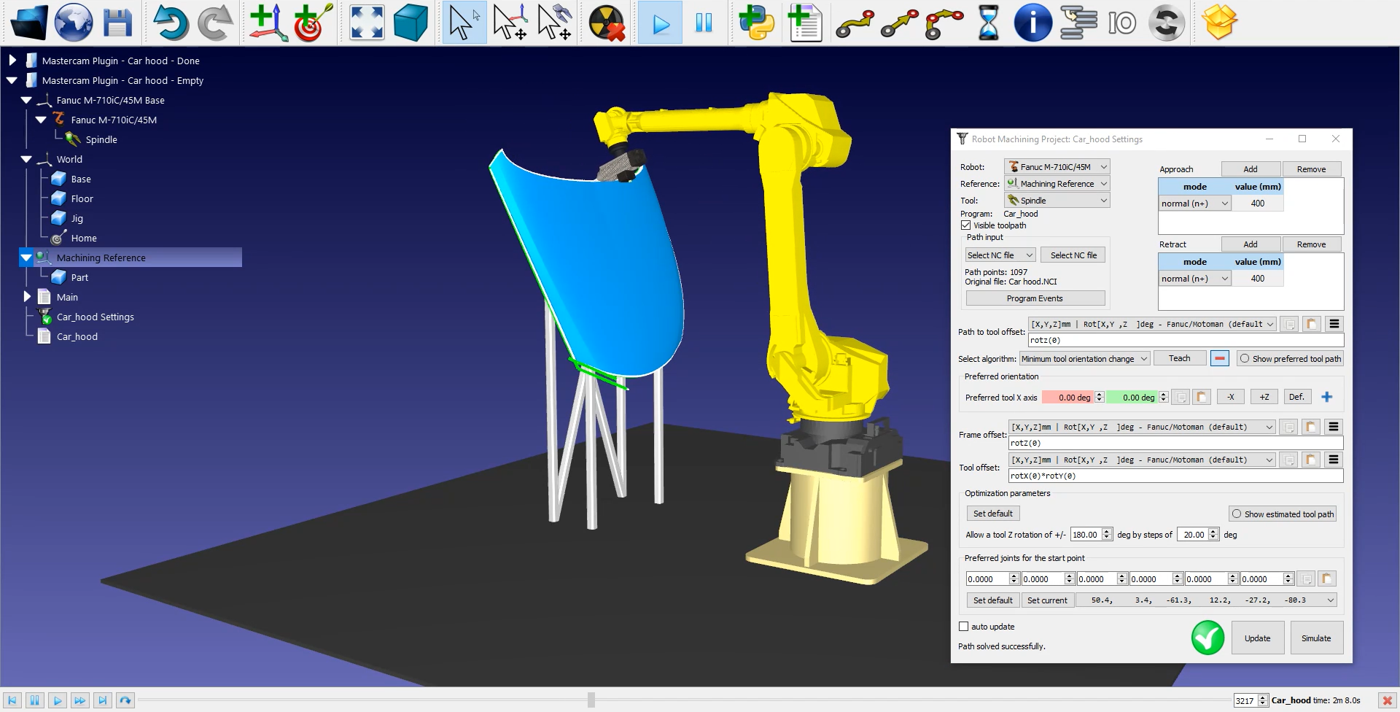
Una vez importada la trayectoria de corte del robot en RoboDK, debería ver la trayectoria de corte unida a la referencia del molde de su estación RoboDK. En los ajustes de la campana del carro
También puede ajustar el valor de los movimientos de aproximación y retracción antes y después de la trayectoria de corte. En este ejemplo, una aproximación/retracción de 400 mm debería ser segura. Esos movimientos son ahora 4 veces más largos que la aproximación/retracción por defecto y ayudarán a evitar cualquier colisión con la pieza.
También puede ajustar la orientación de la pieza en la parte inferior del menú.
El siguiente paso es verificar si el orden en el que se ejecutarán los tramos del recorrido es correcto seleccionando

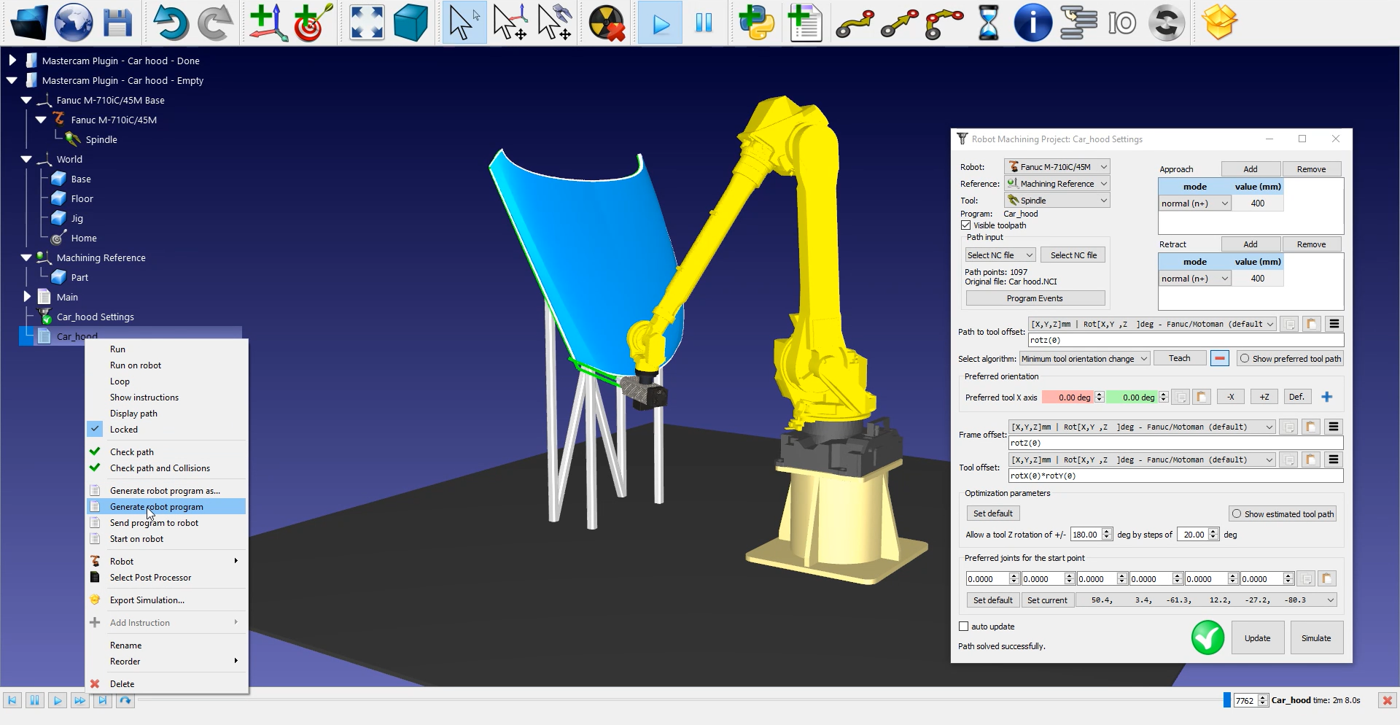
Para generar el programa de su robot, asegúrese de utilizar el postprocesador adecuado. Haga doble clic en el robot
Por último, haga clic con el botón derecho del ratón en
Los archivos Fanuc LS y/o TP están ahora listos para ser transferidos al controlador de su robot.