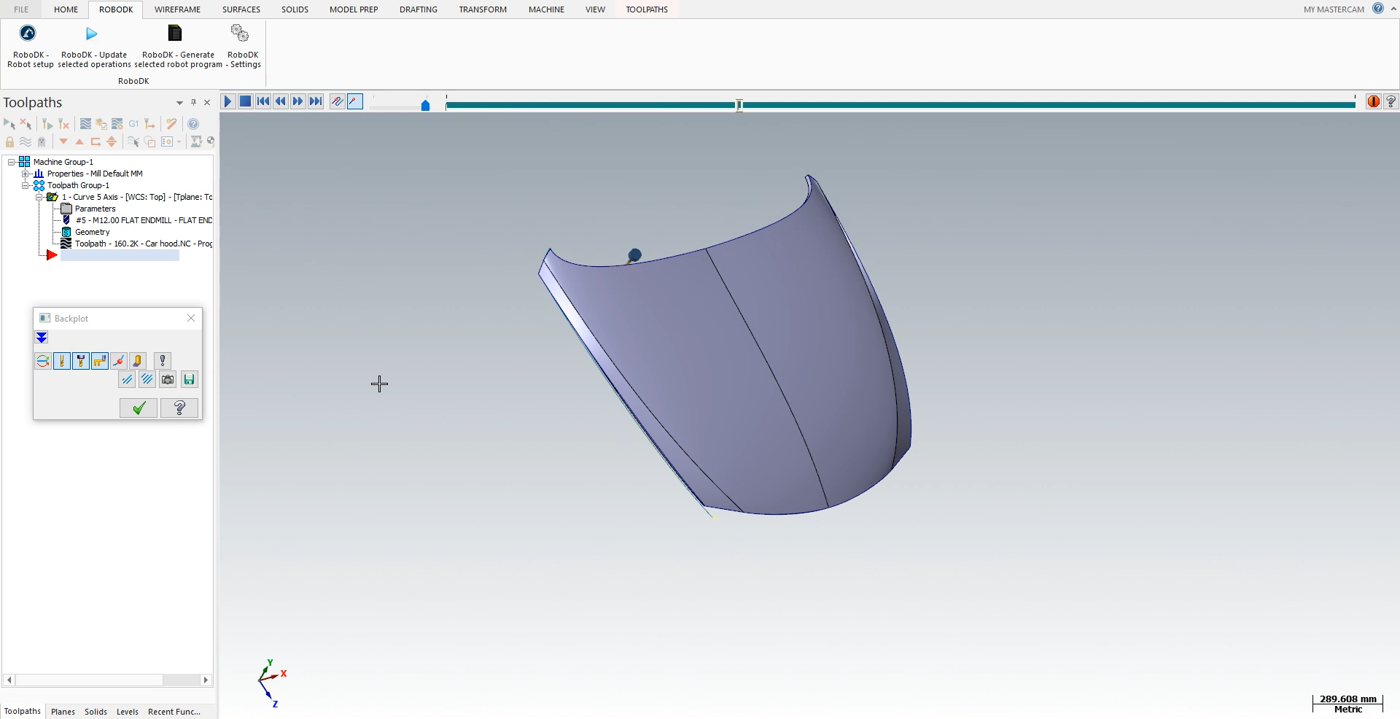
Trayectoria de la herramienta de corte en Mastercam
Abra su objeto 3D en Mastercam e inicie la simulación de corte. Puede ver que el software ha ajustado la orientación de la herramienta para que coincida con la superficie de corte
Siga los pasos siguientes para cargar su pieza en RoboDK:
1.Seleccione la pestaña RoboDK y seleccione RoboDK - Configuración del robot.
2.Seleccione Cargar pieza.
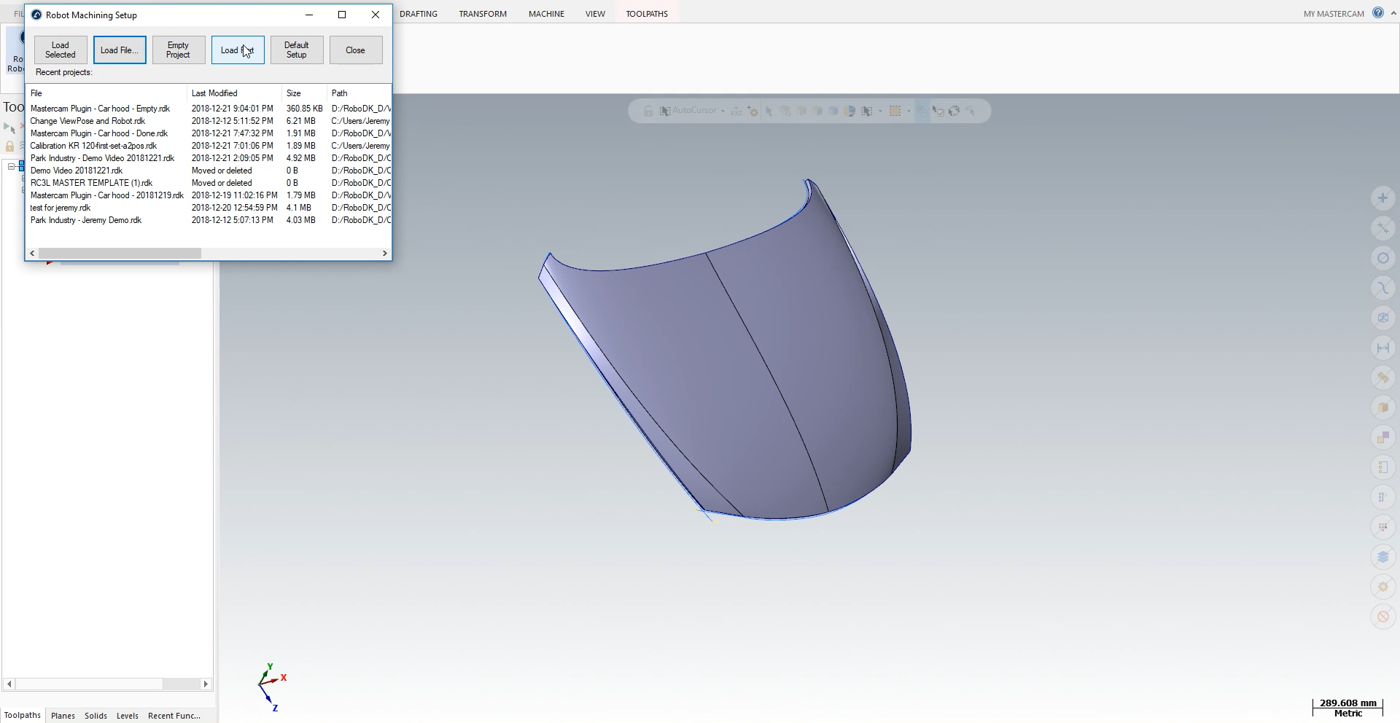
Debería ver la pieza cargada en el sistema de coordenadas activo (Referencia de mecanizado) en la plantilla de la estación RoboDK.
Nota: Para importar su pieza en la posición correcta, deberá configurar la Referencia de mecanizado en una posición específica. Haga clic con el botón derecho en Machining Reference➔ Visible para revelar el marco. Configure el origen en esta posición exacta en Mastercam cuando cree su pieza. Cuando importe la pieza, RoboDK hará coincidir el origen de la pieza con el origen de la Referencia de mecanizado.
El siguiente paso es importar la trayectoria de corte de Mastercam a RoboDK.
1.Seleccione la pestaña RoboDK en Mastercam.
2.Seleccione RoboDK - Actualice las operaciones seleccionadas.
3.Vaya al RoboDK.