Crear el sistema de coordenadas de mecanizado del robot
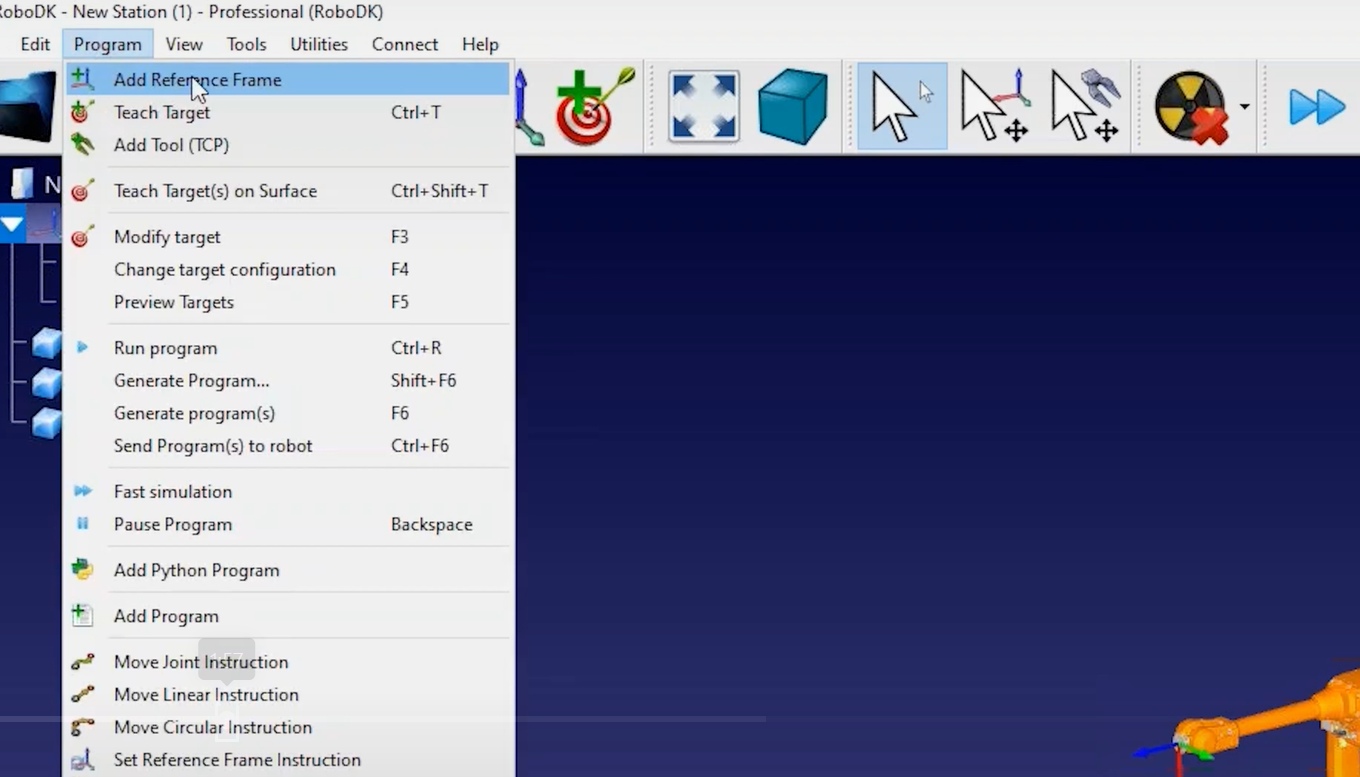
Puede crear un nuevo sistema de coordenadas para el útil de mecanizado de su robot seleccionando el menú Programa y, a continuación, Añadir base de referencia.
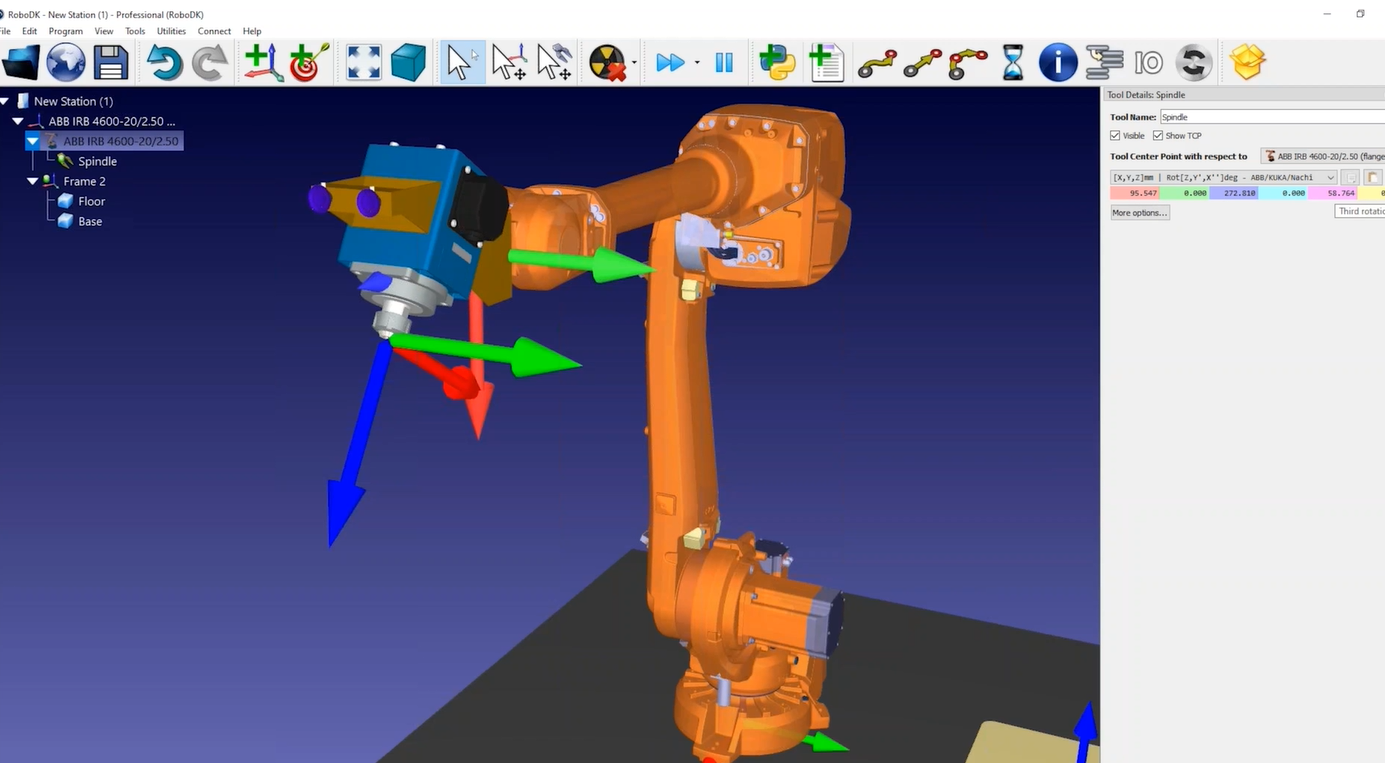
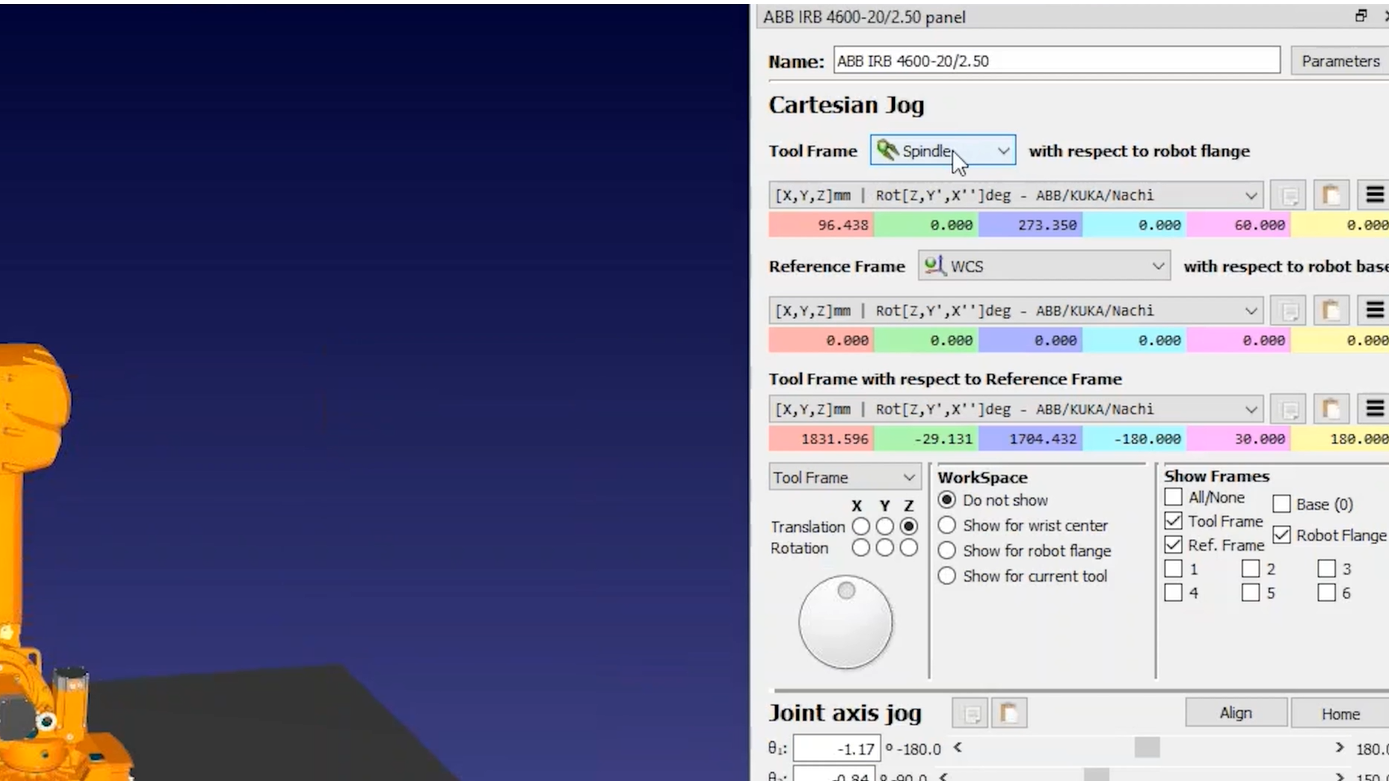
Siga estos pasos para definir correctamente la herramienta (TCP):
1.Puede introducir las coordenadas de la herramienta si dispone de ellas (puede elegir entre diferentes formatos de orientación específicos del proveedor para introducir la pose de la herramienta).
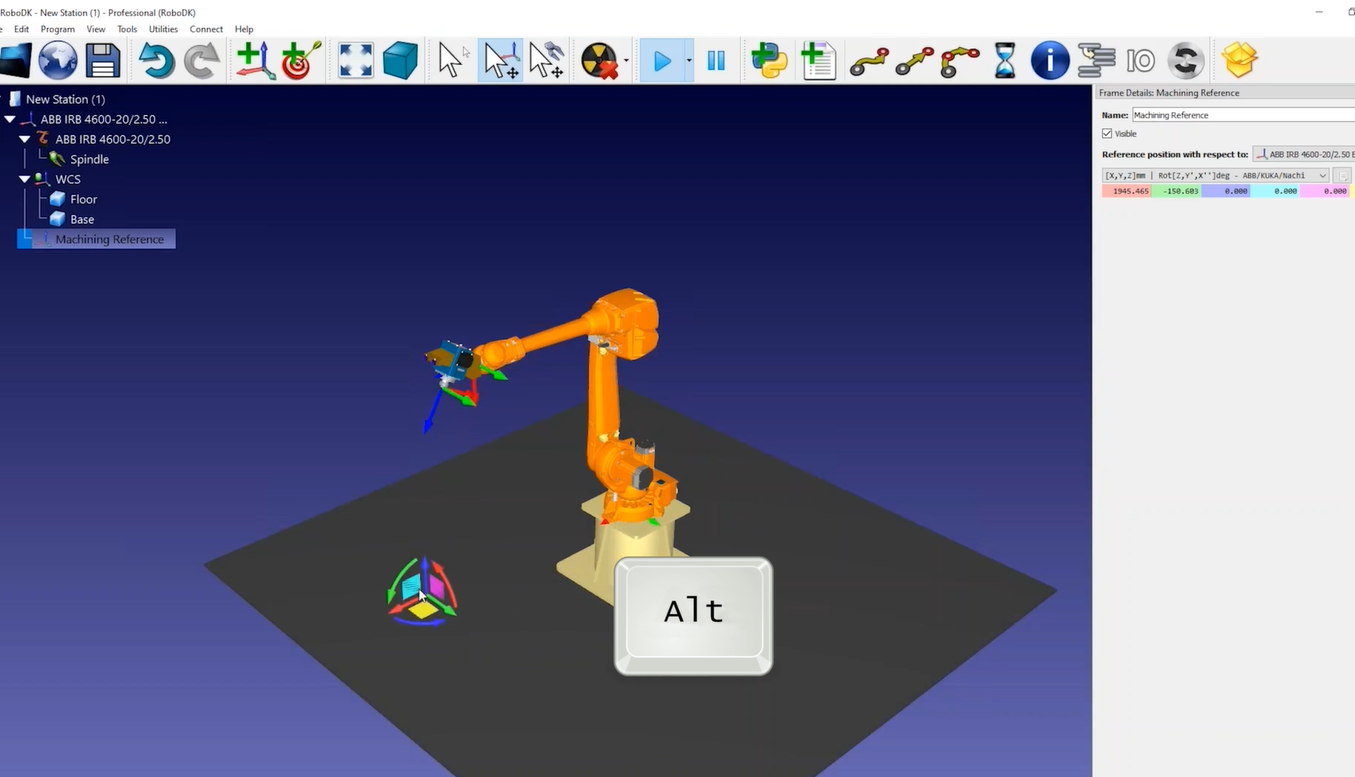
2.Manteniendo pulsada la tecla ALT puede mover el robot o cualquier sistema de coordenadas.
3.Manteniendo pulsadas las teclas ALT y Mayús puede modificar la posición y orientación de su TCP.
Siga estos pasos para añadir otro sistema de coordenadas que represente la referencia de mecanizado:
4.Seleccione el menú Programa y, a continuación, Añadir sistema de coordenadas.
5.Puede renombrar los elementos del árbol pulsando F2 o haciendo clic con el botón derecho y seleccionando Renombrar.
6.Manteniendo pulsada la tecla ALT puede mover el sistema de coordenadas donde desee si tiene la posibilidad de elegir dónde colocará la pieza
7.Puede hacer doble clic en el robot para ver qué herramienta y sistema de coordenadas está utilizando. Para una posición dada del robot, los valores que vea en el panel del robot deben coincidir con los mismos valores que vea en el controlador de su robot.
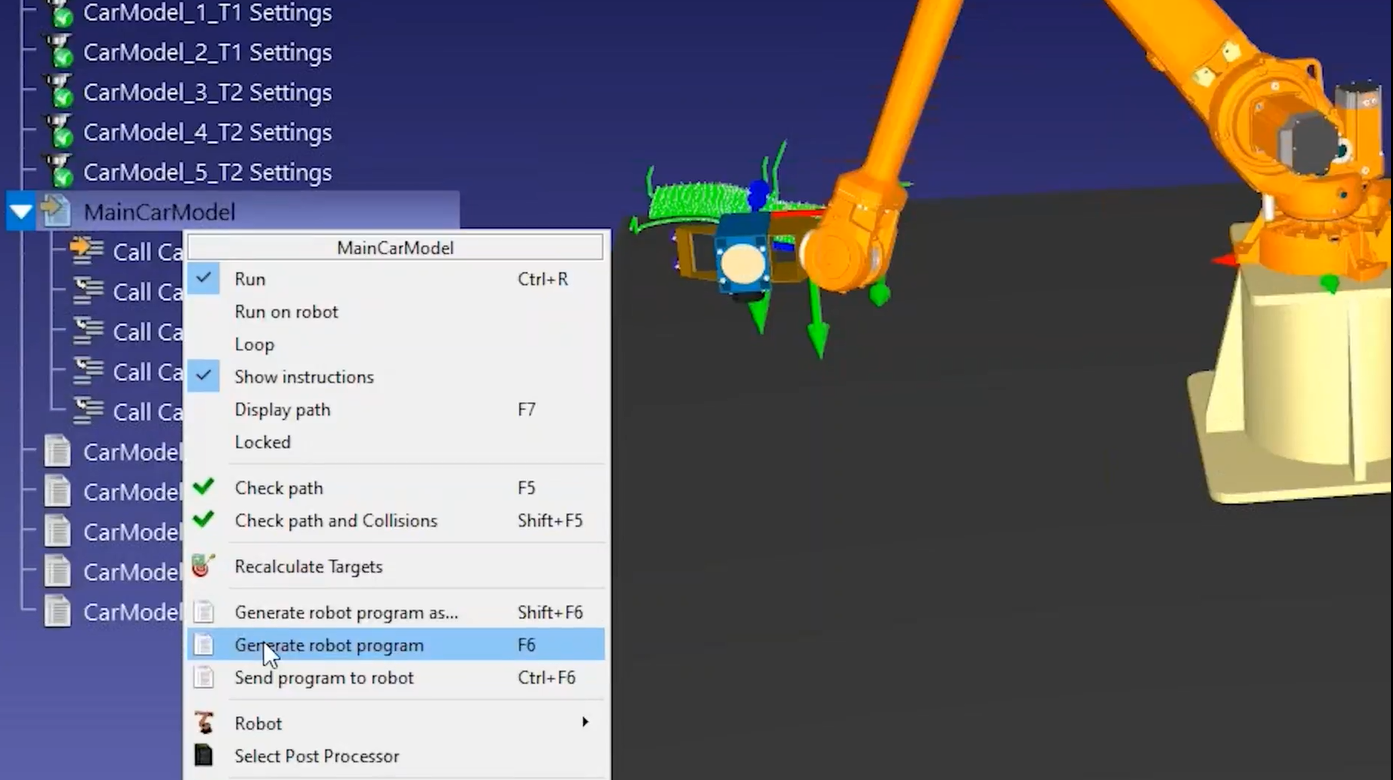
Siga estos pasos para guardar su célula robot:
8.Una vez que haya construido su célula robótica, puede guardarla como un único archivo RDK seleccionando Archivo➔ Guardar estación. Esto guardará todos los ajustes, incluidos los modelos 3D, como un único archivo.
9.Cargue el archivo de trabajo de mecanizado en RoboDK y RoboDK deberá crear automáticamente un proyecto de mecanizado del robot para cada operación de mecanizado.
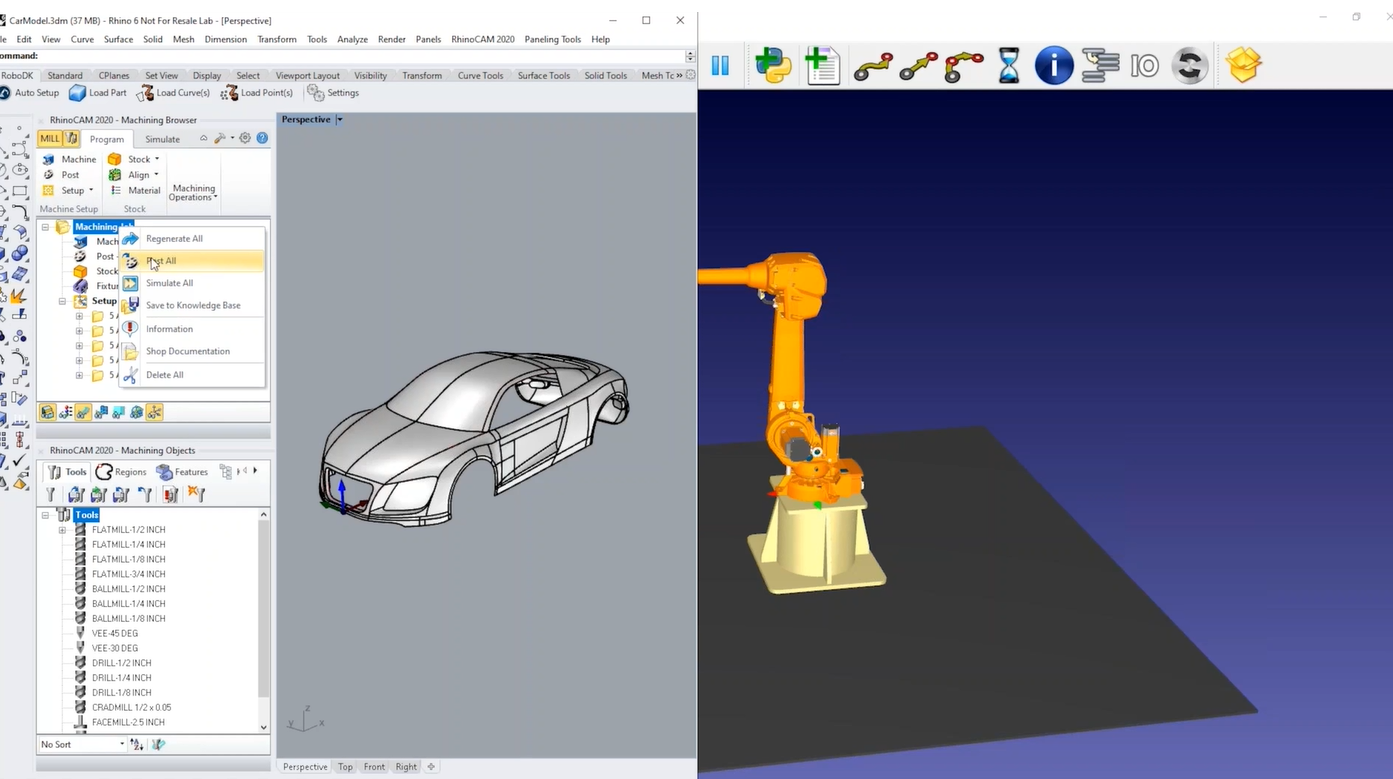
10.Puede seleccionar Actualizar para ver si RoboDK puede encontrar una ruta factible utilizando la configuración predeterminada. También puede actualizar todas las operaciones en bloque.
11.Una vez que tenga una simulación válida en RoboDK, puede hacer clic con el botón derecho en su programa y seleccionar Generar programa. Esto generará los archivos requeridos por el controlador de su robot.