Personalizar la orientación de la herramienta
Puede personalizar fácilmente la orientación de la herramienta a lo largo del programa de mecanizado de su robot enseñando la orientación preferida.
En este ejemplo, podríamos mejorar la orientación de la herramienta para las 2 últimas operaciones de mecanizado:
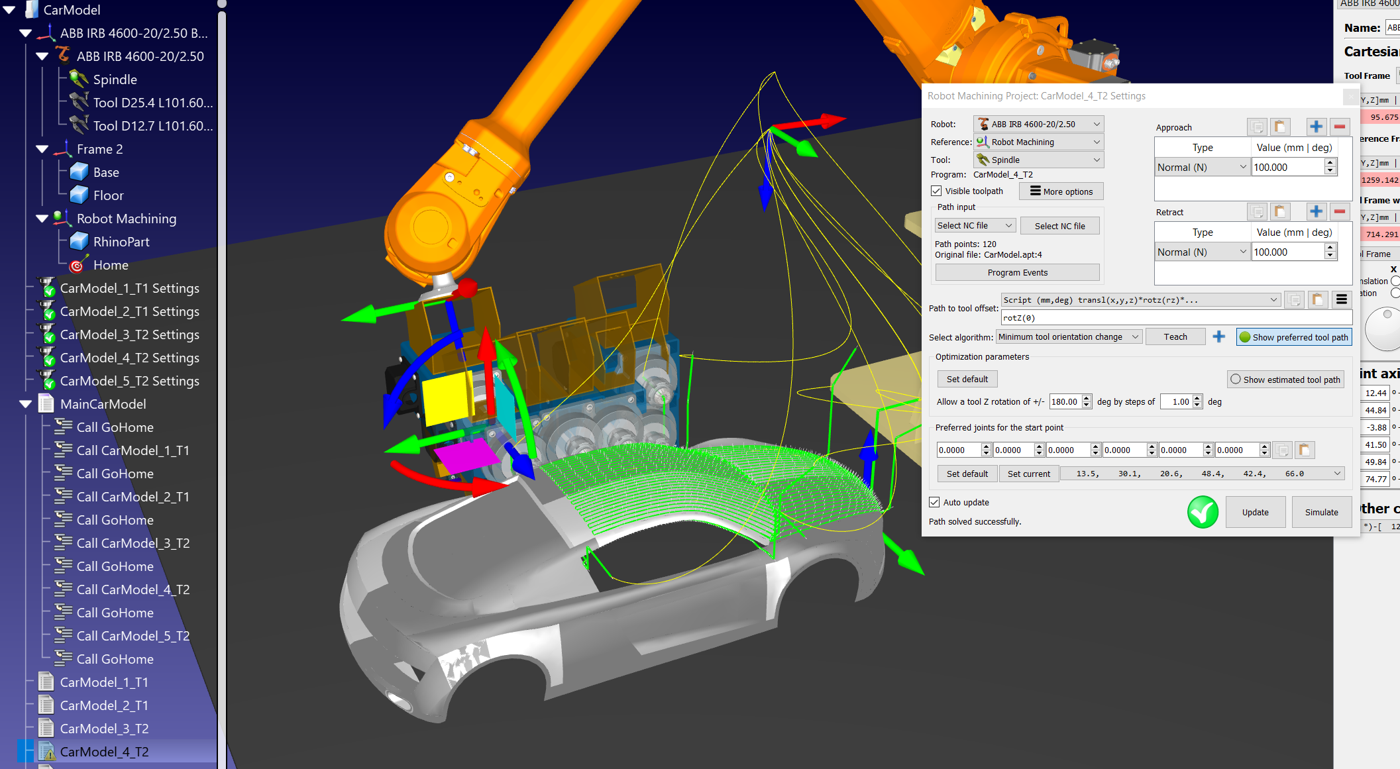
1.Haga doble clic en la 4ª operación de mecanizado para abrir los ajustes de mecanizado del robot para esa operación.
2.Seleccione Simular o ejecute el programa correspondiente y detenga el robot en un punto de la trayectoria de mecanizado.
3.Seleccione el botón Mostrar trayectoria de herramienta preferida para ver la orientación de la herramienta que RoboDK intentará que siga el robot.
4.Mantenga pulsada la tecla Alt para coger la herramienta del robot y coja la flecha redonda azul gire alrededor del eje Z de la herramienta. Mueva la orientación de la herramienta a una orientación que desee seguir.
5.Seleccione Enseñar en el menú de mecanizado del robot para tener en cuenta esa orientación a lo largo de la trayectoria. Al seleccionar Enseñar, le está diciendo a RoboDK que desea seguir la orientación actual de la herramienta, de modo que los ajustes se adaptarán para coincidir con esa orientación.
6.Seleccione Actualizar para volver a calcular la ruta.
Seleccione Simular para ejecutar la simulación (o haga doble clic en el programa generado).
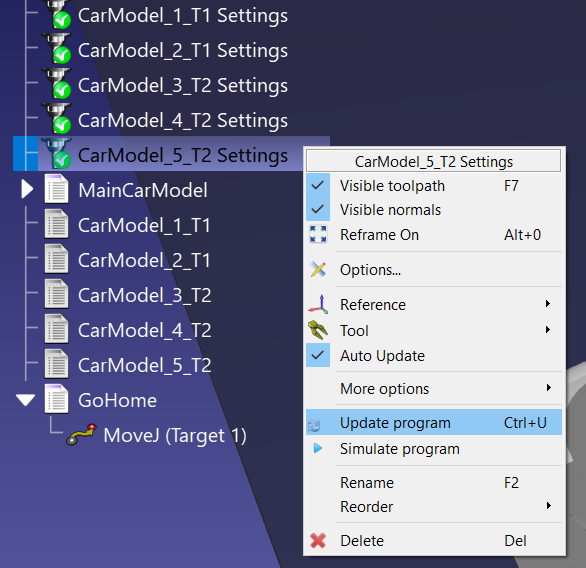
7.Si el resultado le da lo que esperaba, puede copiar los ajustes y pegarlos en otra trayectoria de herramienta: Haga clic con el botón derecho en los ajustes de mecanizado del robot y seleccione Copiar ajustes. A continuación, haga clic con el botón derecho en los nuevos ajustes de mecanizado del robot y seleccione Pegar ajustes. Vuelva a hacer clic con el botón derecho en este último proyecto de mecanizado del robot y seleccione Actualizar programa para actualizar el programa asociado a este trabajo de mecanizado del robot.