Transiciones seguras entre trabajos de mecanizado robotizados
Para que la transición entre los trabajos de mecanizado de su robot sea más segura, puede hacer que el robot se desplace a una posición de aproximación después de cada operación de mecanizado.
Siga estos pasos para crear un nuevo programa llamado GoHome y desplazarse a esta ubicación una vez finalizado el trabajo de mecanizado:
1.Cree un nuevo programa seleccionando Programa➔ Añadir programa o seleccione el botón correspondiente en la barra de herramientas.
2.Cambie el nombre del programa pulsando F2 por algo como GoHome.
3.Seleccione el programa que acaba de crear.
4.Mueva el robot a una ubicación segura y seleccione Programar➔ Mover instrucción de articulación o seleccione el botón correspondiente en la barra de herramientas. Esta operación debería crear un nuevo objetivo en esa ubicación y añadir una instrucción de mover articulaciones a ese objetivo si el programa estaba previamente seleccionado.
5.A continuación, puede hacer que el robot se desplace a este objetivo inicial entre cada operación de mecanizado haciendo clic con el botón derecho del ratón en la primera instrucción de llamada al programa y seleccionando Añadir instrucción➔ Instrucción de llamada al programa.
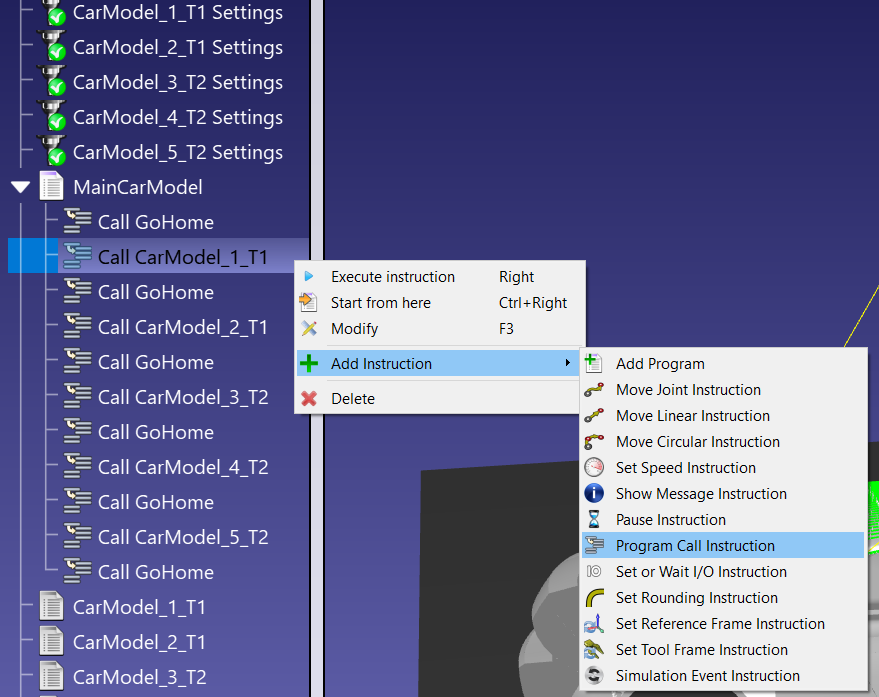
6.Introduzca el nombre del programa al que desea ir (GoHome) y seleccione OK.
7.A continuación, puede copiar/pegar esta instrucción dentro de su programa para obtener rápidamente el resultado final.
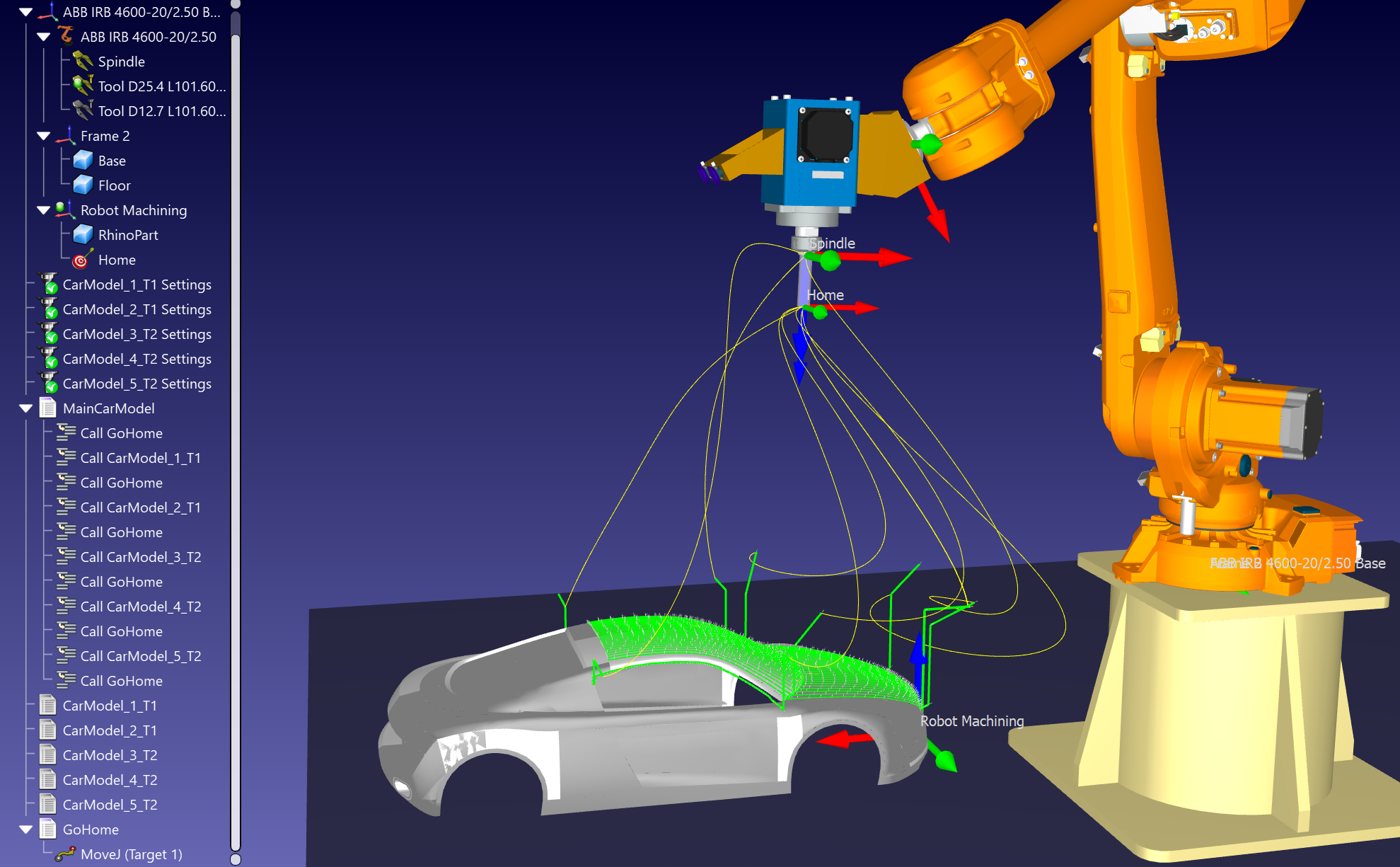
8.Haga clic con el botón derecho del ratón en el programa principal y seleccione Visualizar trayectoria para ver la trayectoria de la herramienta del robot como una línea amarilla. Esto le ayudará a visualizar si la posición del objetivo de aproximación es adecuada para su proyecto.