Laser Cutting
Introducción
Esta sección le ayudará a crear un proyecto básico en RoboDK para la simulación de robots y la programación fuera de línea. En este ejemplo se simula y programa un robot Motoman para una aplicación de corte por láser utilizando Fusion 360 y RoboDK.
Puede elegir entre dos métodos diferentes: Uno que utiliza el método de extracción de características y otro que utiliza las características de corte por láser de Fusion 360.
Con el plug-in RoboDK para Fusion 360 podrá cargar fácilmente en RoboDK modelos 3D creados en Fusion 360. Este plug-in le permite programar más de 1000 modelos de robot de más de 80 fabricantes directamente desde Autodesk Fusion 360.
El plug-in de RoboDK para Fusion 360 es gratuito si dispone de una licencia de RoboDK.
Sugerencia: Obtenga más información sobre el Addin de Robpara Fusion 360 sección Addin de RoboDK para Fusion 360oDK en la .
Ejemplo de corte por láser
Para iniciar el proyecto, primero tendrá que seleccionar el ejemplo de corte por láser de RoboDK en la biblioteca por defecto.
Configuración
Este ejemplo utiliza el robot Motoman MH50-35, un cabezal de corte por láser, una pieza de metal estampada y una mesa de corte por láser.
Cargue la estación:
1.Seleccione Archivo ➔
2.Localice el ejemplo Laser-Cutting de la sección de ejemplos de RoboDK:
C:/RoboDK/Ejemplos/Plugin-Fusion-360-Laser-Cutting.rdk.
Observe que el sistema de coordenadas
Ahora que ha cargado la estación puede abrir Fusion 360.
Método 1: Extracción de características
Abra su objeto 3D en Fusion 360. En este ejemplo, el objeto 3D es una pieza de metal estampada
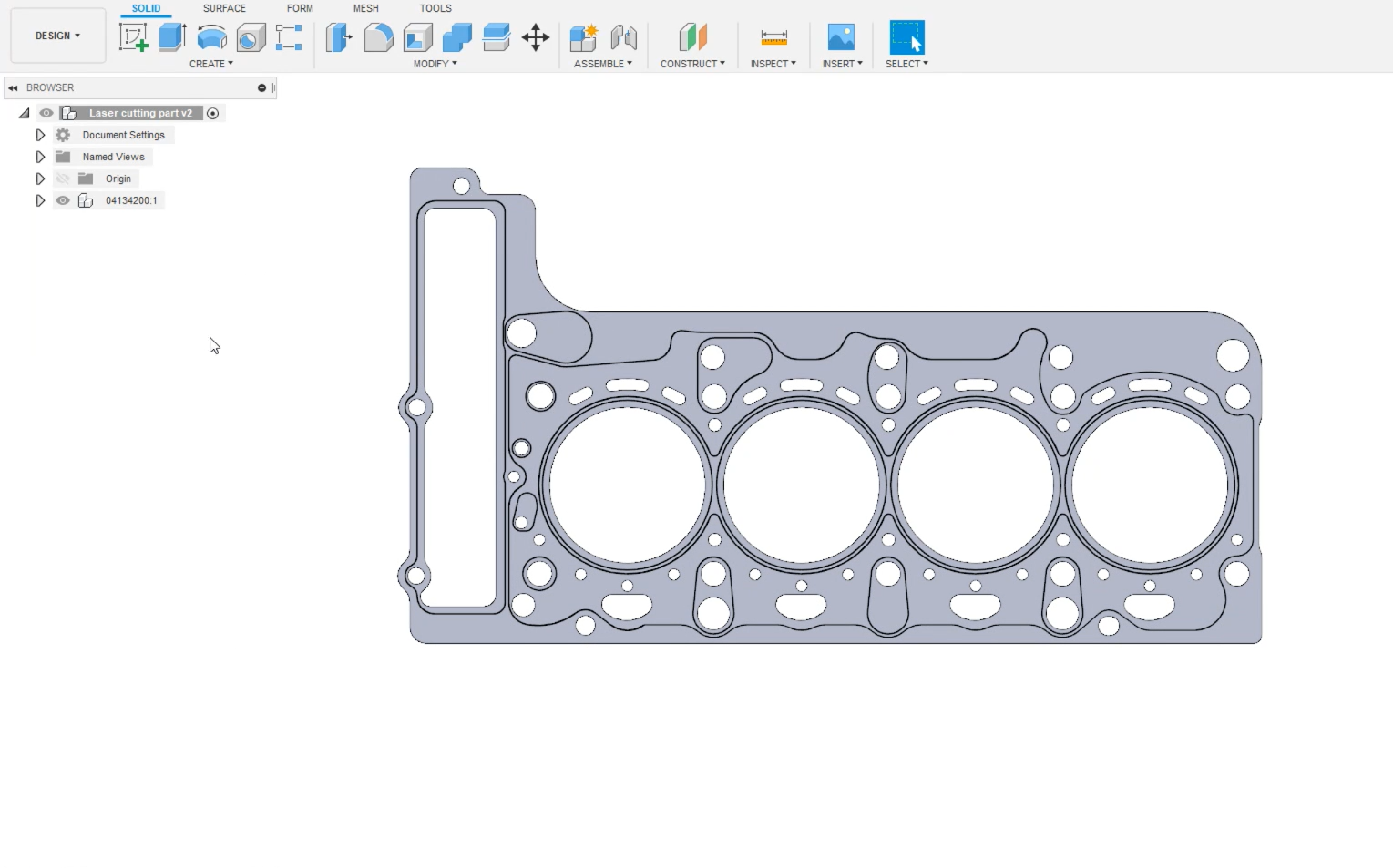
El objetivo de este proyecto es crear automáticamente un programa de robot que corte todos esos agujeros con una cortadora leaser. Programarlo a mano llevaría demasiado tiempo.
1.Seleccione la sección Diseño de Fusion en la esquina superior izquierda.
2.Seleccione la pestaña Herramientas. Aquí es donde encontrará el plugin RoboDK.
3.Haga clic en el botón
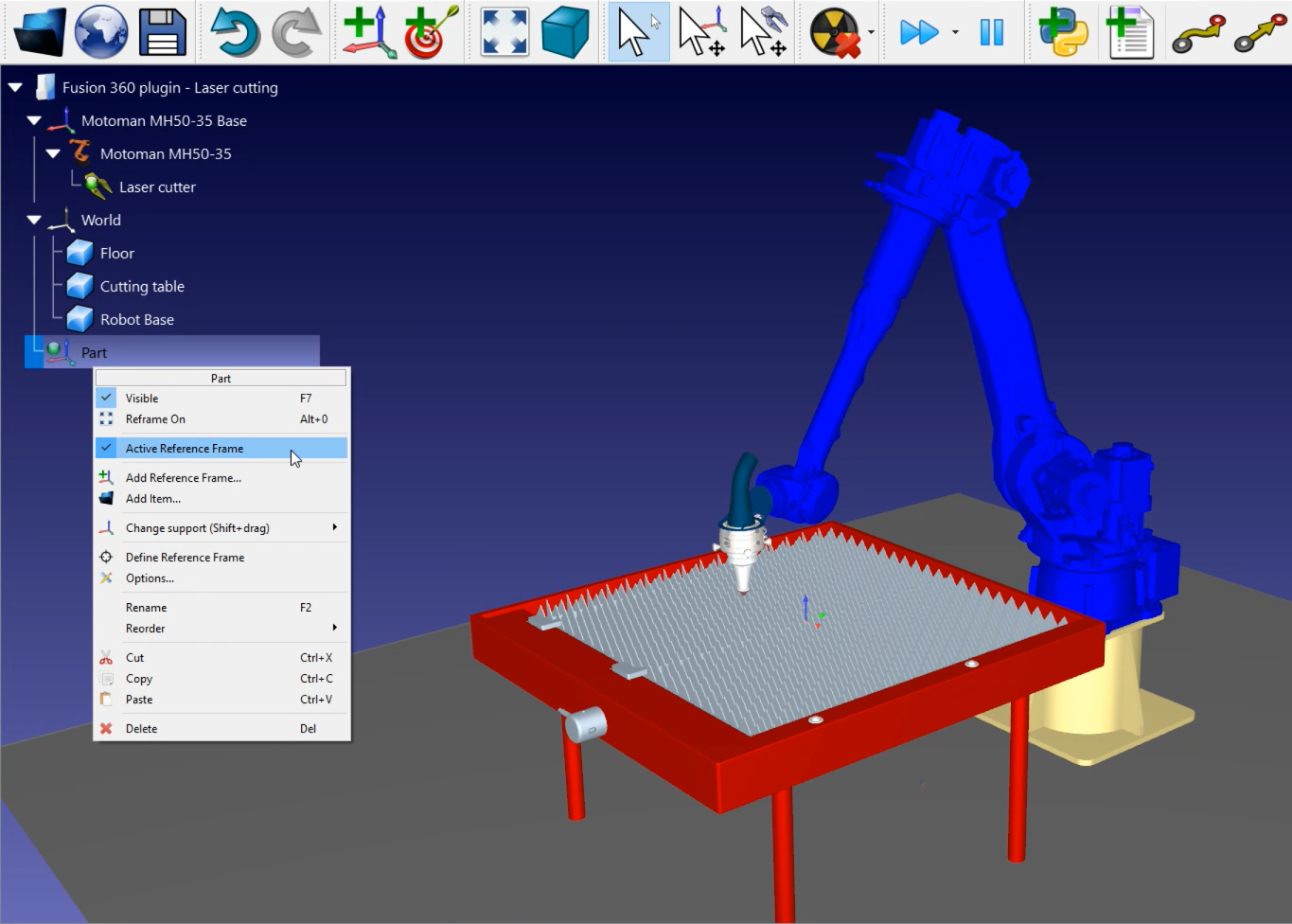
La pieza se ha importado en el sistema de coordenadas activo de su estación RoboDK. Asegúrese de que la pieza se ha importado con la orientación correcta. En este ejemplo, tendrá que modificar la orientación de la pieza.
Siga los pasos siguientes para modificar la orientación de su pieza:
1.Haga doble clic en la pieza de corte por
2.Haga clic en Más opciones en el menú abierto.
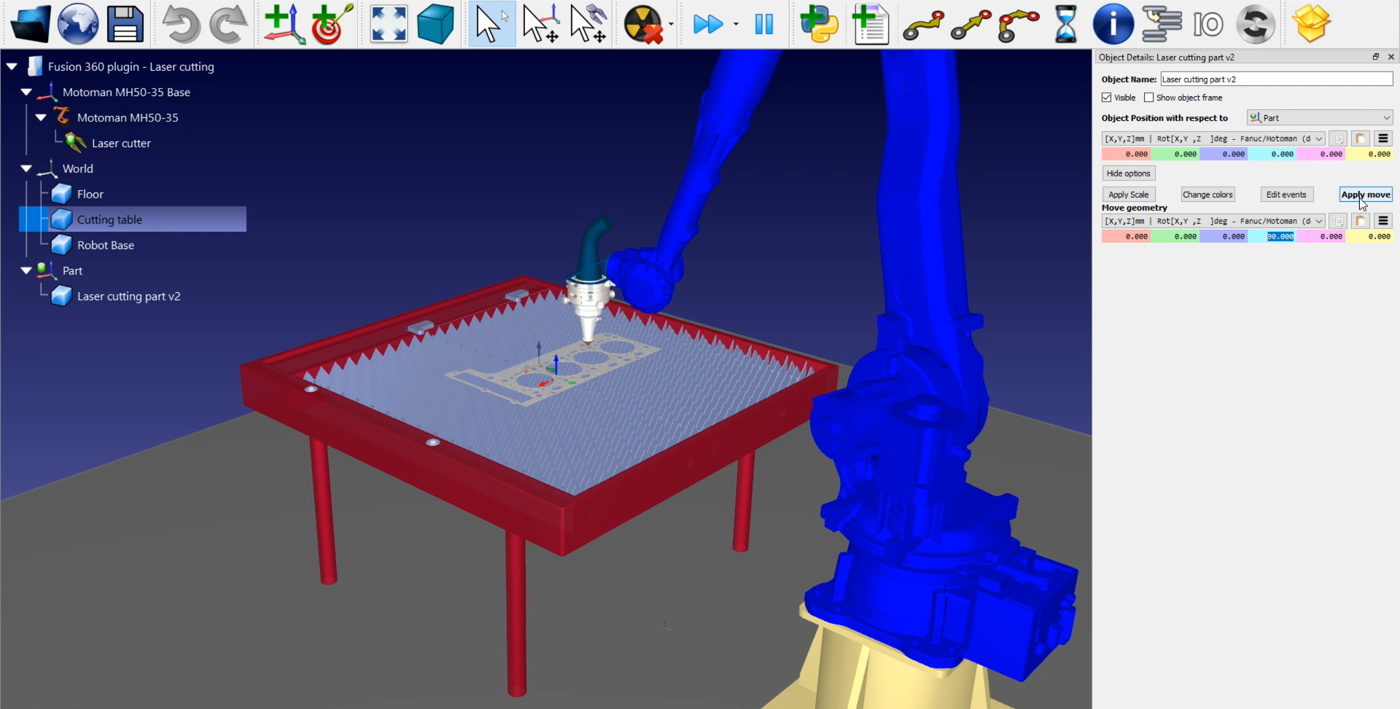
3.Vaya a Mover geometría e introduzca 90 en el eje X (azul claro) como se muestra en la imagen superior.
4.Pulse Aplicar movimiento para guardar la orientación.
El plugin de RoboDK tiene otra función en Fusion 360 que le ayudará a importar su trayectoria de corte a RoboDK.
1.Vuelva a Fusion 360.
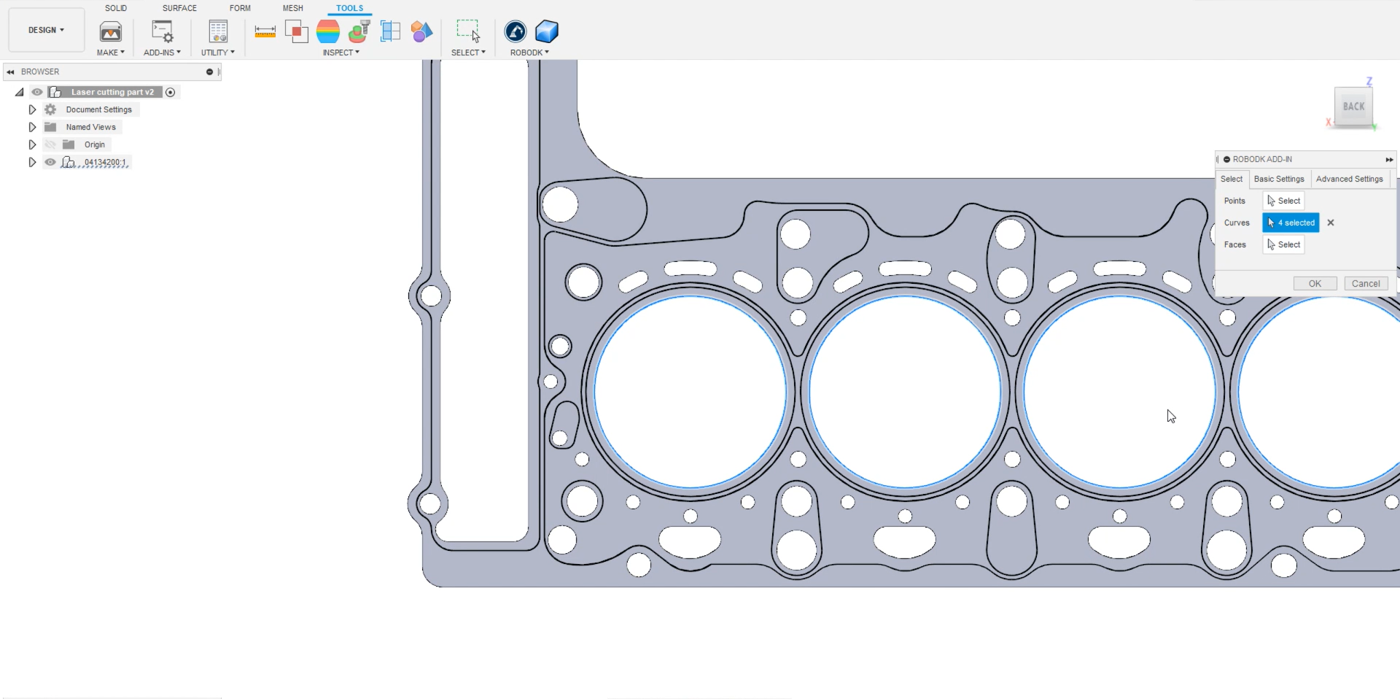
2.En el menú de plugins de RoboDK, seleccione Cargar curva(s).
3.Seleccione Curvas en el menú abierto.
4.Seleccione los bordes de los cuatro círculos grandes como se muestra en la imagen inferior.
Ahora tendrá que dar a RoboDK una orientación para la herramienta robótica.
1.Seleccione Caras en el menú abierto.
2.Seleccione las caras en las que desea que la herramienta sea normal, como se muestra en la imagen inferior.
Ahora puede configurar los ajustes:
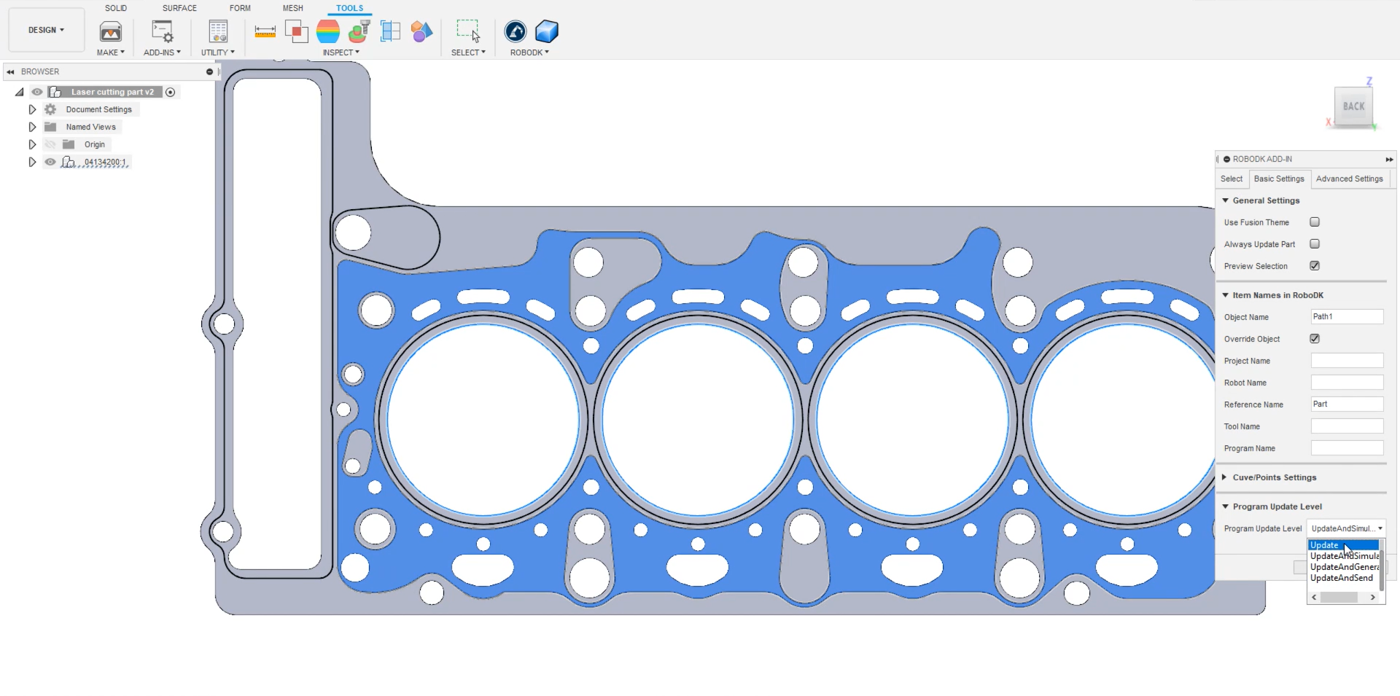
1.En el mismo menú, vaya a Ajustes básicos.
2.Desmarque la opción Utilizar tema de fusión si prefiere mantener el comportamiento predeterminado de RoboDK.
3.Introduzca un Nombre de objeto para nombrar su ruta. En este ejemplo será Ruta 1.
4.Introduzca el Nombre de referencia con el que desea que se exporte. En este ejemplo se denomina Pieza, igual que en la estación RoboDK.
5.Seleccione Actualizar en el nivel de actualización del programa para tener más opciones después, como se muestra en la imagen superior. Esto es opcional.
6.Pulse OK.
Ahora debería poder ver la trayectoria importada en RoboDK. En este ejemplo, la orientación vuelve a ser incorrecta y tendrá que modificar la orientación como hizo antes con la pieza.
1.Haga doble clic en su ruta, en este ejemplo es
2.Haga clic en Más opciones en el menú abierto.
3.Vaya a Mover geometría e introduzca 90 en el eje X (azul claro).
4.Pulse Aplicar movimiento para guardar la orientación.
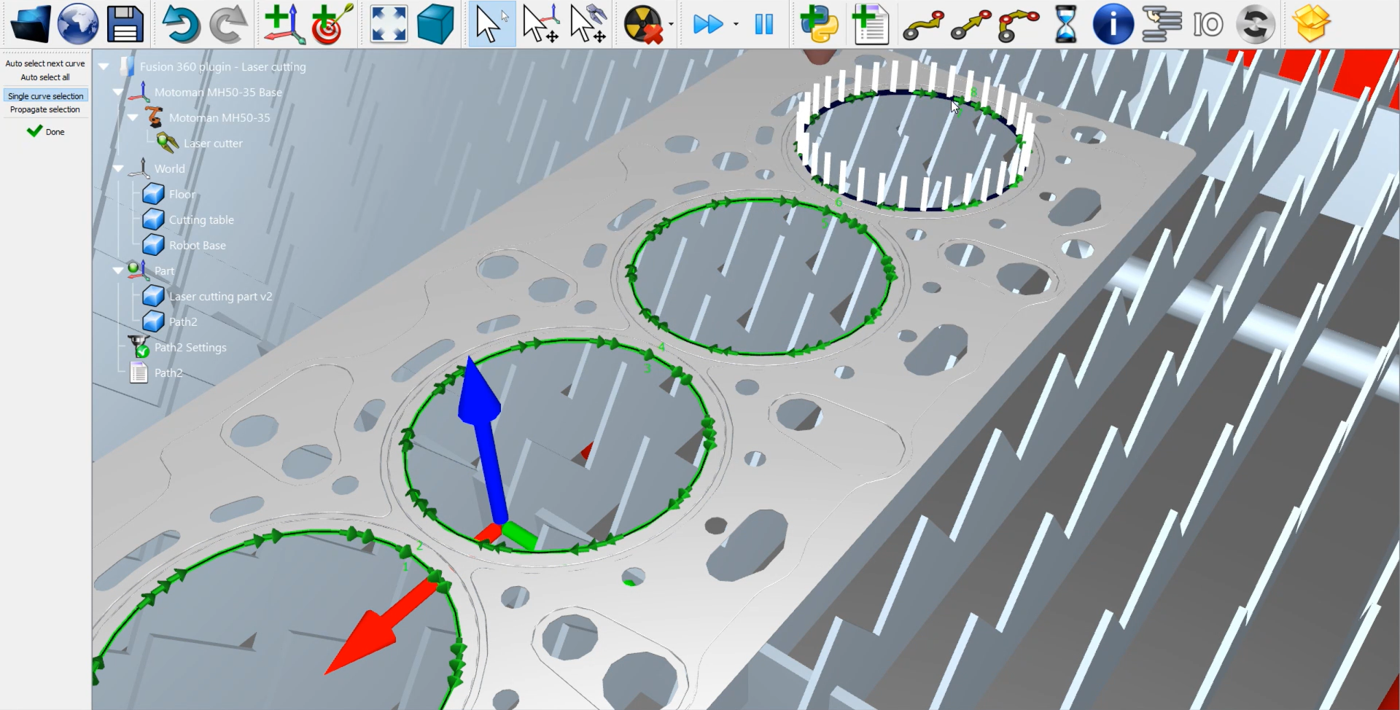
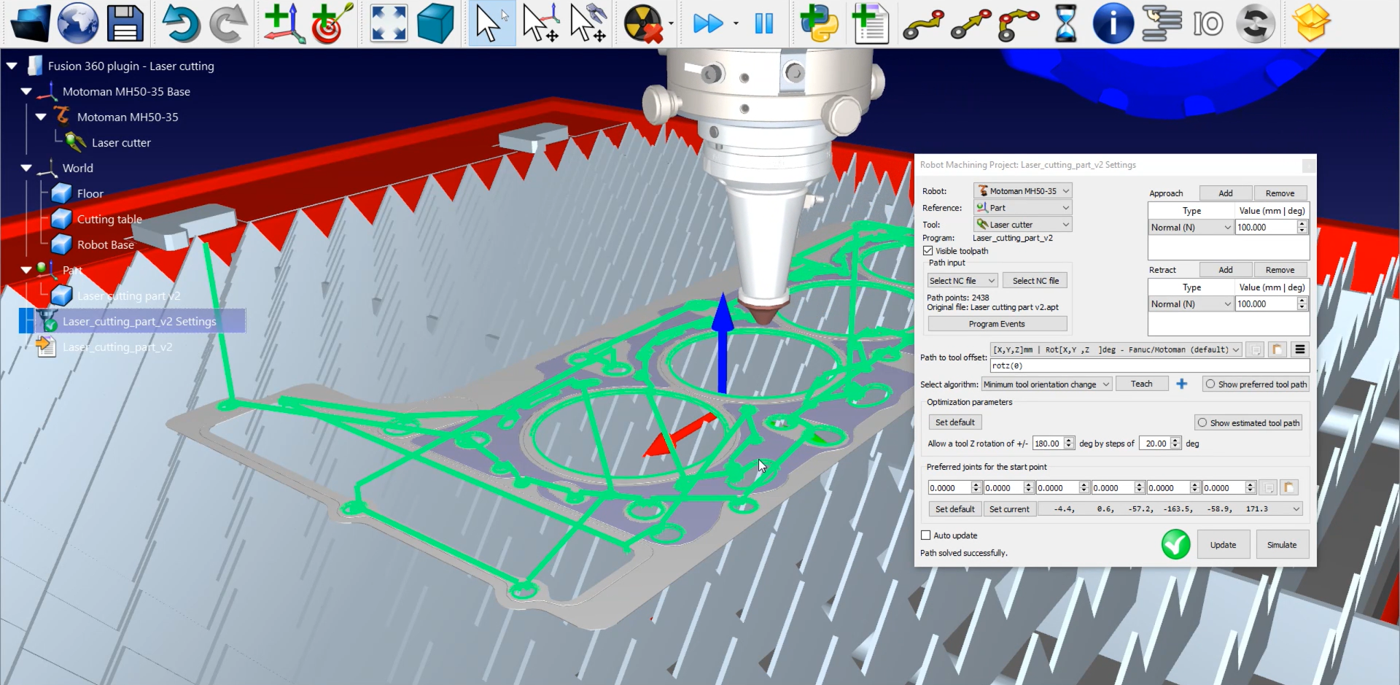
El siguiente paso es verificar si el orden en el que se ejecutarán las secciones de la trayectoria es correcto seleccionando
1.Haga doble clic en la configuración de su ruta, aquí
2.Asegúrese de que el robot, la referencia y la herramienta son los correctos.
3.Haga clic en Seleccionar curva.
4.Seleccione los otros círculos.
5.Haga clic en
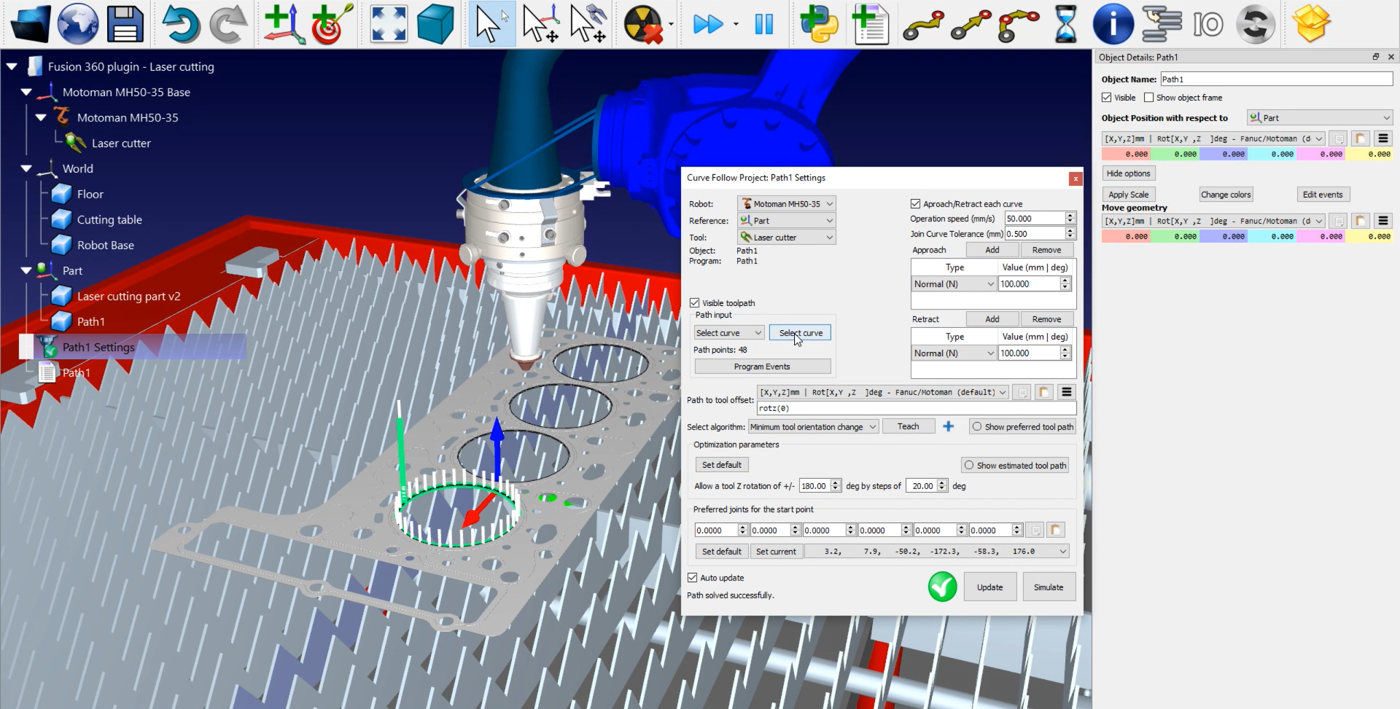
Ahora puede notar que los movimientos de aproximación y repliegue son un poco largos en términos de longitud.
Puede modificar fácilmente esos valores
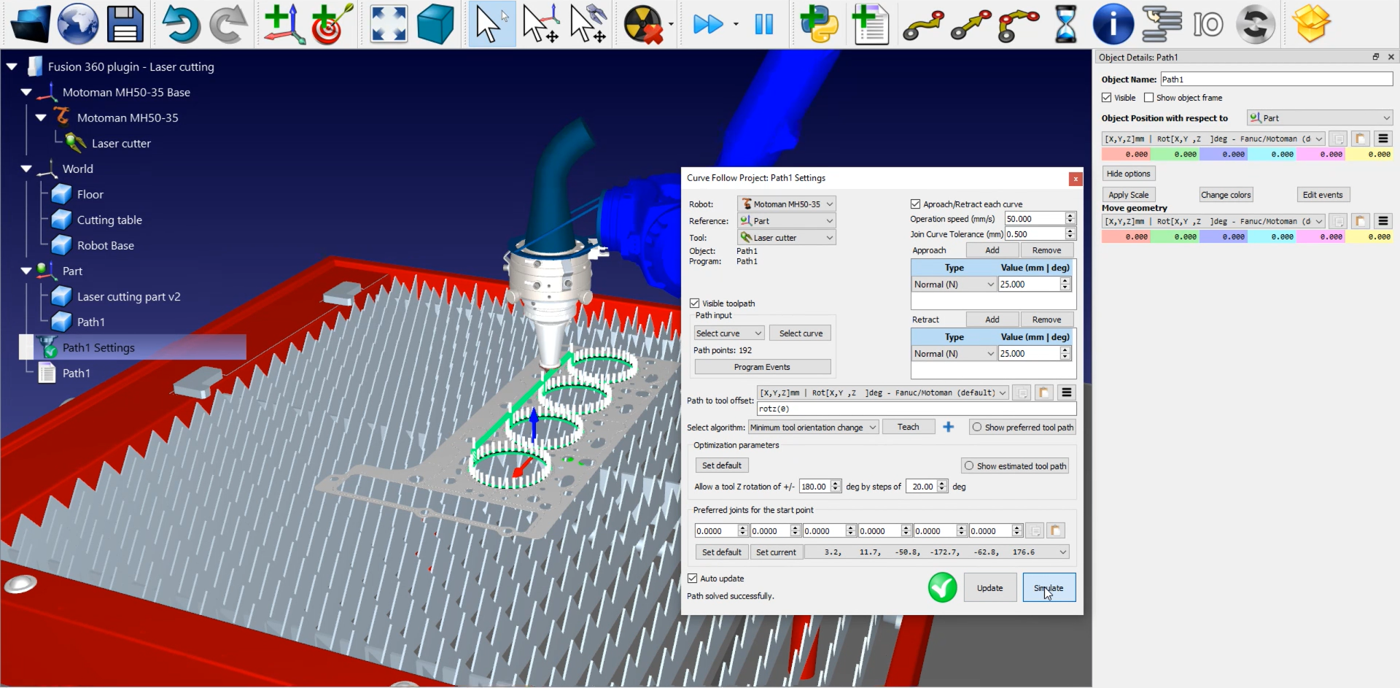
1.Haga doble clic en la configuración de su ruta, aquí
2.Introduzca un valor menor en las casillas de Aproximación y Repliegue. En este ejemplo, puede introducir 25 mm.
3.Haga clic en Actualizar➔ Simular.
El siguiente paso es considerar el radio del láser. En este ejemplo, el láser está cortando demasiado material.
Cómo configurar su radio láser:
1.Vuelva a Fusion 360.
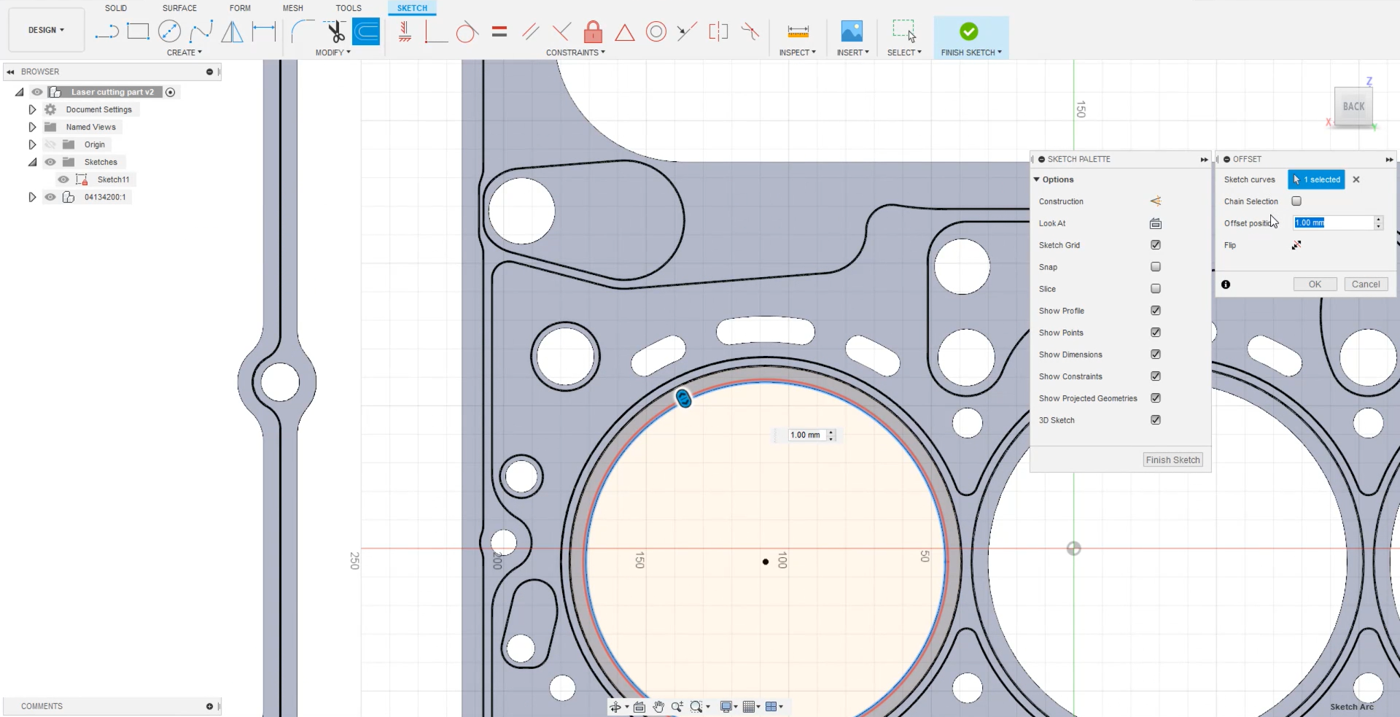
2.Vaya a la pestaña Sólido➔ Crear croquis para crear su croquis.
3.Seleccione un círculo y haga clic en Desplazamiento en el menú superior para crear una nueva trayectoria.
4.Considerando que el diámetro del rayo láser es de 2 mm, el radio será de 1 mm. Introduzca 1 en la casilla Posición de desplazamiento, como se muestra en la imagen inferior.
5.Repita estos pasos para los otros 3 círculos.
6.Pulse Ok.
Ahora puede cargar las curvas en RoboDK.
1.Vaya a la pestaña Herramientas.
2.Haga clic en RoboDK➔ Curva(s) de carga.
3.Seleccione Curvas y haga clic en el boceto de cada círculo.
4.Seleccione Caras y haga clic en la cara que desea que la herramienta sea normal.
5.En este ejemplo, el nombre del objeto (Ajustes básicos) es Ruta2.
6.Haga clic en Ok para importar la ruta en RoboDK.
Puede modificar la orientación de la Trayectoria2 como se ha explicado anteriormente. Si se acerca, podrá ver la diferencia entre las dos trayectorias. Ahora puede eliminar la Trayectoria1.
El siguiente paso es verificar si las secciones de la ruta que ha cargado son correctas mediante:
1.Seleccione
2.Haga clic en Seleccionar curva y seleccione los otros círculos como se muestra en la imagen inferior.
3.Seleccione
Puede reducir el tamaño oh los movimientos de Aproximación y Repliegue como se ha explicado anteriormente. En este ejemplo, puede introducir de nuevo 25mm. No olvide actualizar➔ Simule su proyecto de seguimiento de la curva para guardar sus ajustes. Puede hacer los mismos pasos para todos los demás orificios de esta pieza.
Esta forma de construir un programa de corte por láser funciona para el plugin Fusion 360 de RoboDK, pero también para todos los plugins CAD.
Método 2: Funciones de corte por láser de Fusion 360
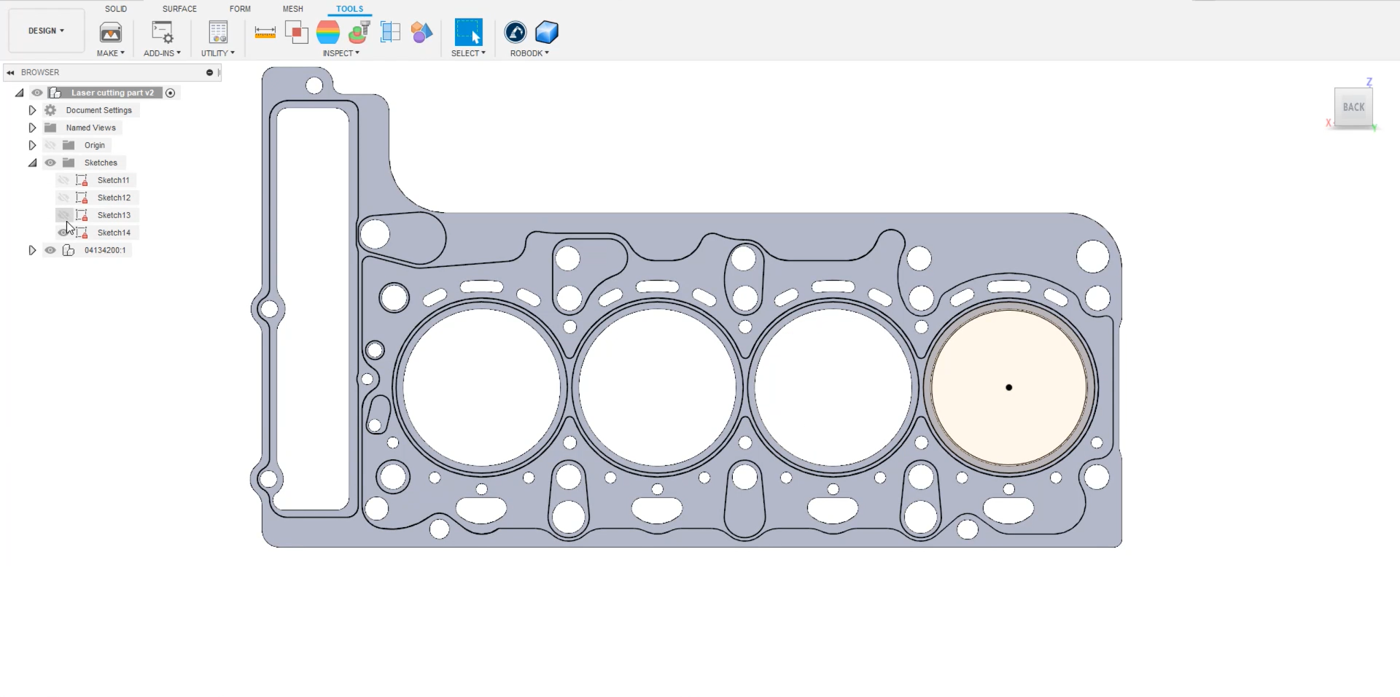
Para utilizar las funciones de corte por láser de Fusion 360, vuelva a Fusion y oculte los bocetos que hizo antes, como se muestra en la imagen siguiente.
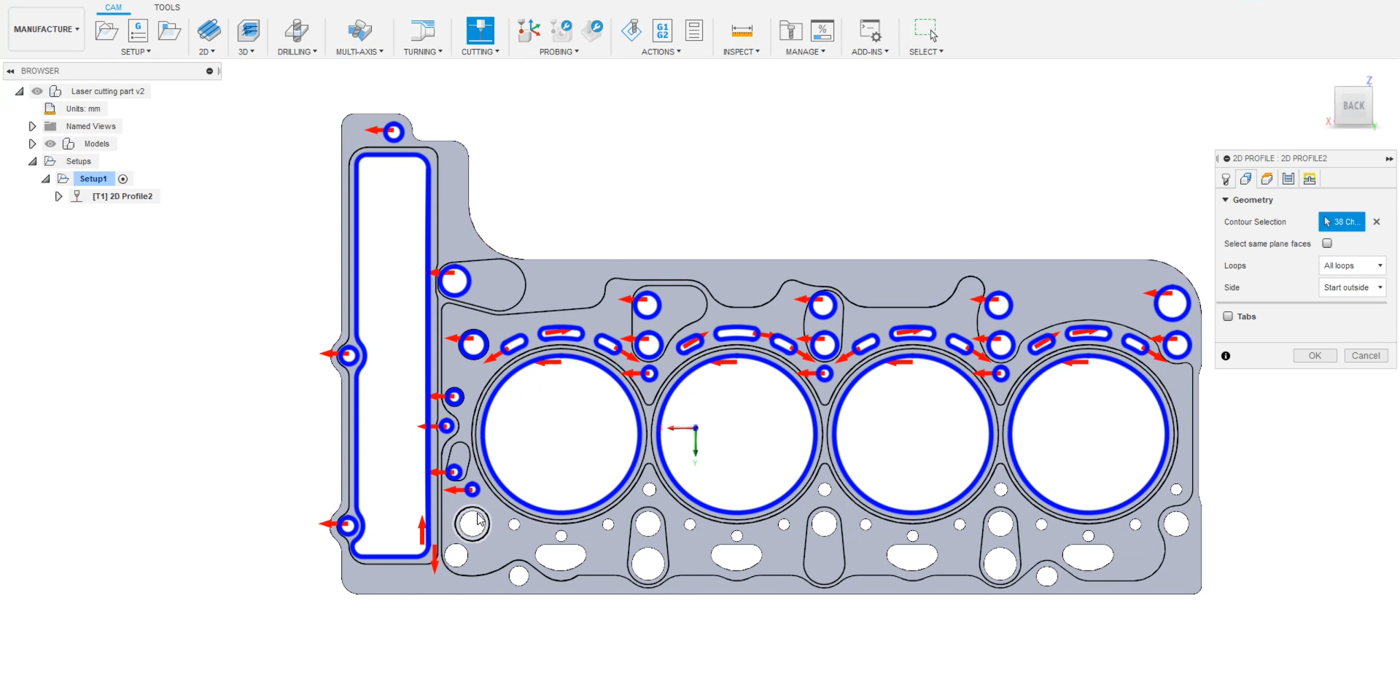
Cambie de la sección Diseño del menú superior izquierdo a Fabricación. En la barra de herramientas, haga clic en la función de corte 2D.
1.Seleccione una herramienta. En este ejemplo es una fresa de 1 mm de ancho.
2.Vaya a la pestaña Geometría del mismo menú y seleccione los círculos que desea cortar. En este ejemplo, se seleccionan todos los orificios de la pieza de metal estampada como se muestra en la imagen inferior.
3.Pulse OK.
Puede simular la trayectoria en Fusion 360 haciendo clic con el botón derecho en su trayectoria y seleccionando Simular. En la configuración, asegúrese de que está utilizando el mismo origen que el modelo. De este modo, se exportará en la posición correcta.
1.Haga clic con el botón derecho del ratón en Setup1➔ Edit.
2.Asegúrese de que el Origen del modelo está seleccionado en la casilla Origen.
3.Seleccione Ok.
Ahora puede transferir su boceto a RoboDK seleccionando Herramientas➔ Cargar proyecto CAM en RoboDK en la pestaña Fusion 360.
Debería ver el boceto importado en RoboDK. Asegúrese de borrar la trayectoria anterior, en este ejemplo la Trayectoria2. Haga doble clic en
Lo único que hay que gestionar son los Eventos del Programa:
1.Haga clic en Programar eventos.
2.Deje libres los tres primeros cuadros de texto, ya que no está realizando un proyecto de mecanizado con un husillo, varias herramientas o unas RPM concretas que alcanzar.
3.Marque la casilla Inicio del recorrido y escriba LaserOn para activar el láser sólo cuando se inicie el recorrido
4.Marque la casilla Final de trayecto y escriba LaserOff para desactivarlo cuando finalice el trayecto.
5.Pulse Ok y Actualizar.
Para generar su programa de robot haga clic con el botón derecho del ratón en
El archivo .pg ya está listo para ser transferido al controlador de su robot.