Pick and Place
Introducción al pick and place
Pick and place se refiere al proceso automatizado en el que los robots recogen piezas o artículos de una ubicación y los colocan en otra. La automatización de las operaciones de pick and place ayuda a aumentar los índices de producción.
Los robots de recogida y colocación pueden encargarse de tareas repetitivas al tiempo que liberan a los trabajadores humanos para que puedan centrarse en trabajos más complejos. Estos sistemas robóticos son un componente crucial en muchas líneas de fabricación y producción para automatizar tareas repetitivas y que requieren mucho tiempo.
Vídeo: Vea este vídeo tutorial de introducción a Pick and place con robots: Pick and Place - Webinar de RoboDK.
Los brazos robóticos pueden realizar fácilmente operaciones de pick and place. Aunque existen brazos robóticos específicos para determinadas aplicaciones de pick and place (como el paletizado para el paletizado, o los robots Scara para el montaje de placas de circuito impreso), un brazo robótico genérico de 6 ejes es adecuado para cualquier operación de pick and place.
Ejemplos de Pick and Place
Puede encontrar algunos proyectos de ejemplo para realizar simulaciones de pick and place en esta sección de la documentación.
Los ejemplos de esta sección incluyen:
1.Un ejemplo sencillo de recogida y colocación en el que un robot recoge una pieza y la deposita en otro lugar.
2.Un ejemplo de pick and place con una operación de montaje.
3.Un ejemplo de recogida y colocación utilizando el Addin de paletización.
4.Un ejemplo de recogida y colocación utilizando la API.
Ejemplo sencillo de pick and place
Esta sección muestra un ejemplo sencillo de pick and place utilizando un brazo robótico con una pinza de vacío que mueve una caja.
Siga estos pasos para crear su ejemplo de selección y colocación:
Crear un nuevo proyecto RoboDK
Estos pasos le mostrarán cómo crear un nuevo proyecto (también conocido como estación) en RoboDK para una aplicación de pick and place.
1.Abra RoboDK: Inicie la aplicación RoboDK en su ordenador.
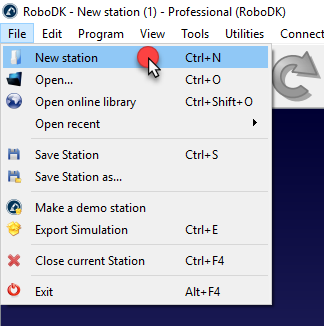
2.Cree una nueva estación: Seleccione Archivo-Nueva estación en el menú principal de RoboDK-Se creará una nueva estación vacía como espacio de trabajo.
3.Añadir un robot desde la biblioteca
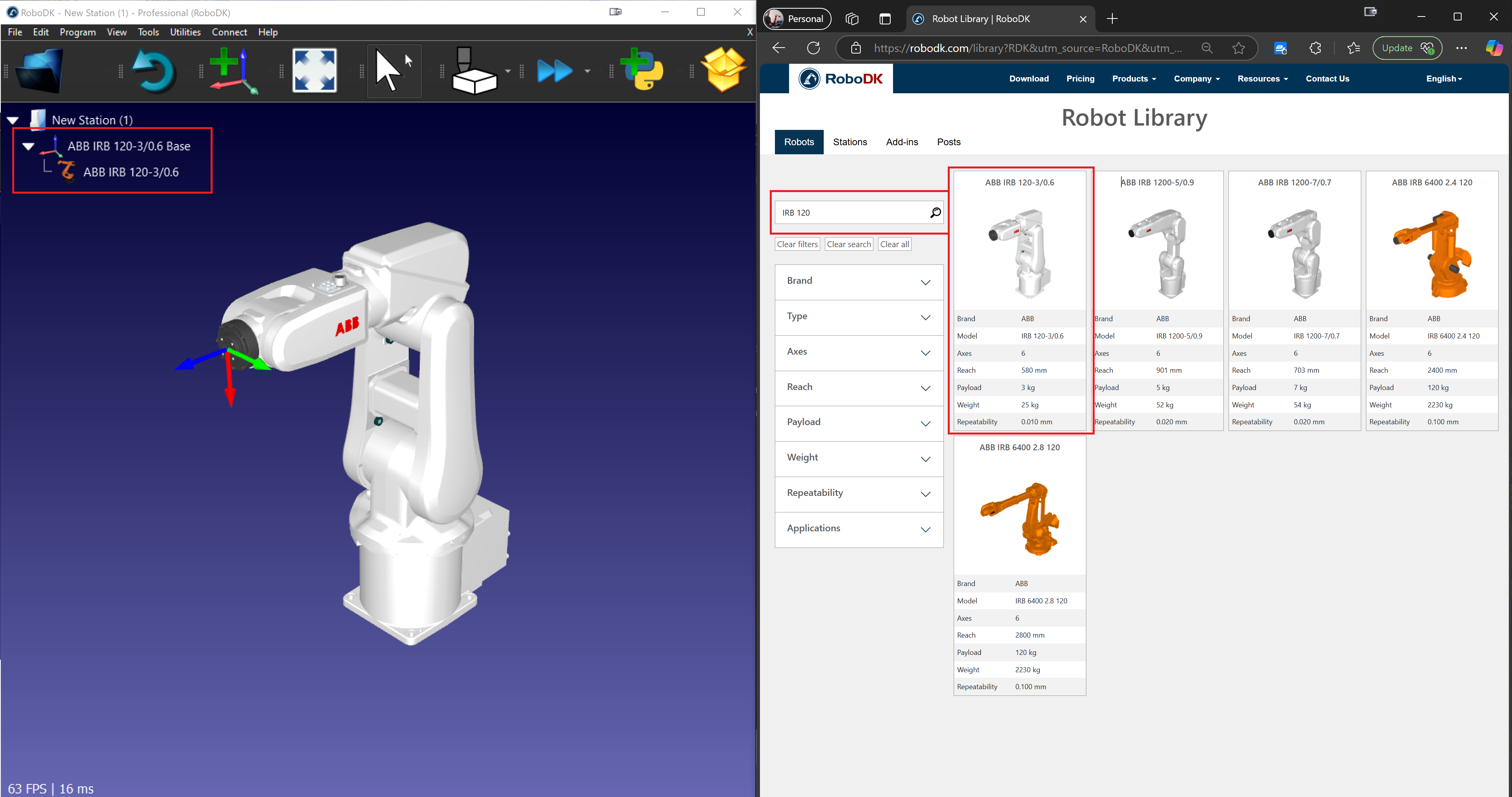
a.Abra la biblioteca de robots en línea para descargar un robot
i.En el menú principal, seleccione Archivo → Abrir biblioteca en línea.
ii.Se abrirá la ventana de la biblioteca RoboDK, en la que se mostrarán diversos robots industriales.
b.Seleccione e importe un robot:
i.Utilice la barra de búsqueda para encontrar un robot adecuado para tareas de pick-and-place (por ejemplo, UR10, ABB IRB 120, Fanuc LR Mate).
ii.Haga clic en el robot deseado y seleccione Descargar.
c.Coloque el robot en la estación:
i.El robot aparecerá automáticamente en la estación.
ii.Utilice la herramienta Mover para ajustar su colocación si es necesario.
4.Añadir un sistema de coordenadas
a.Cree un sistema de coordenadas:
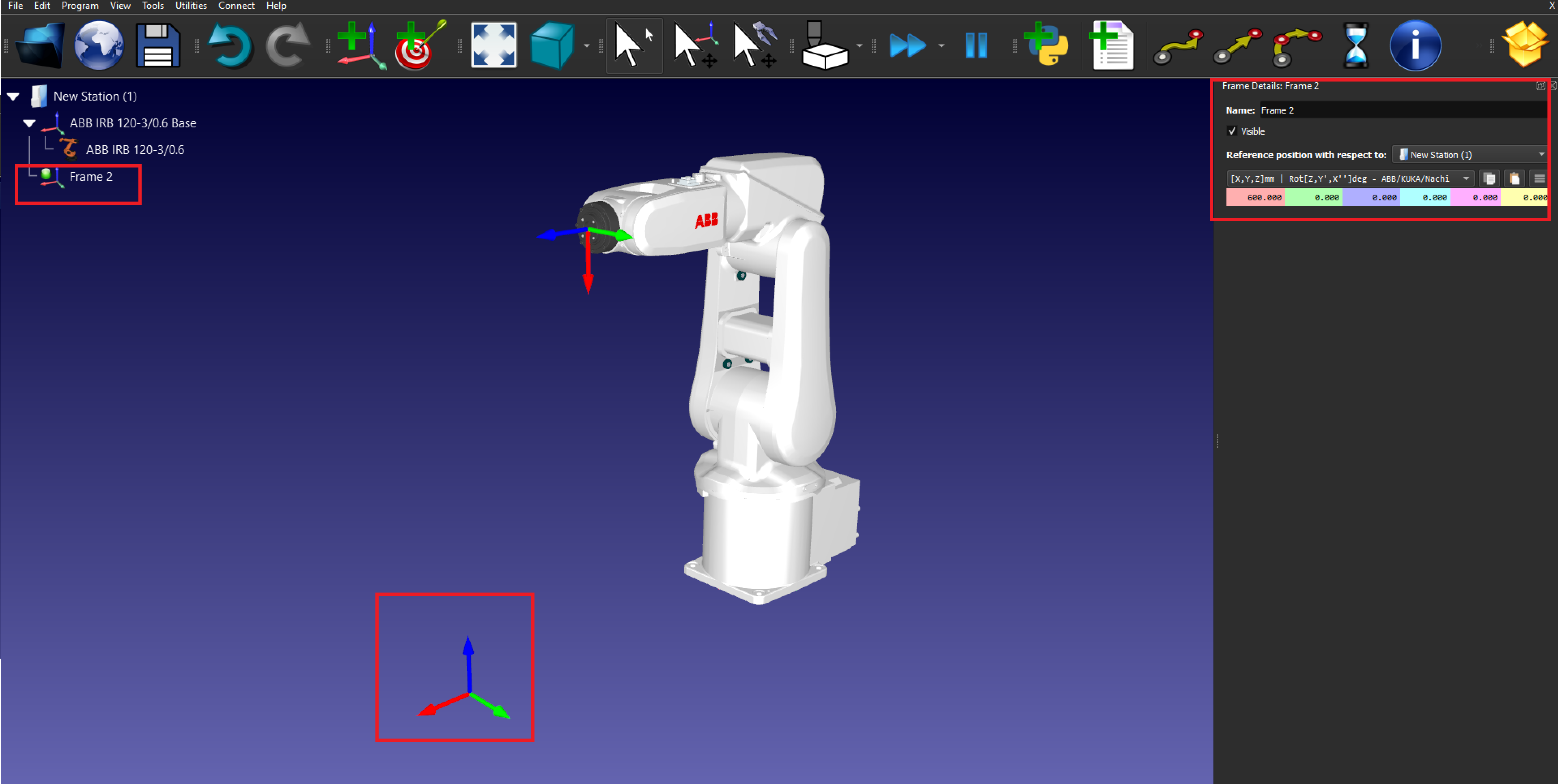
i.Vaya a Programa → Añadir sistema de coordenadas.
ii.Aparecerá un nuevo sistema de coordenadas en el árbol de estaciones y en la vista 3D.
b.Posicione el sistema de coordenadas:
i.Haga doble clic en el sistema de coordenadas para introducir las coordenadas (X, Y, Z) y los valores de rotación.
ii.Pulse OK para guardar la posición.
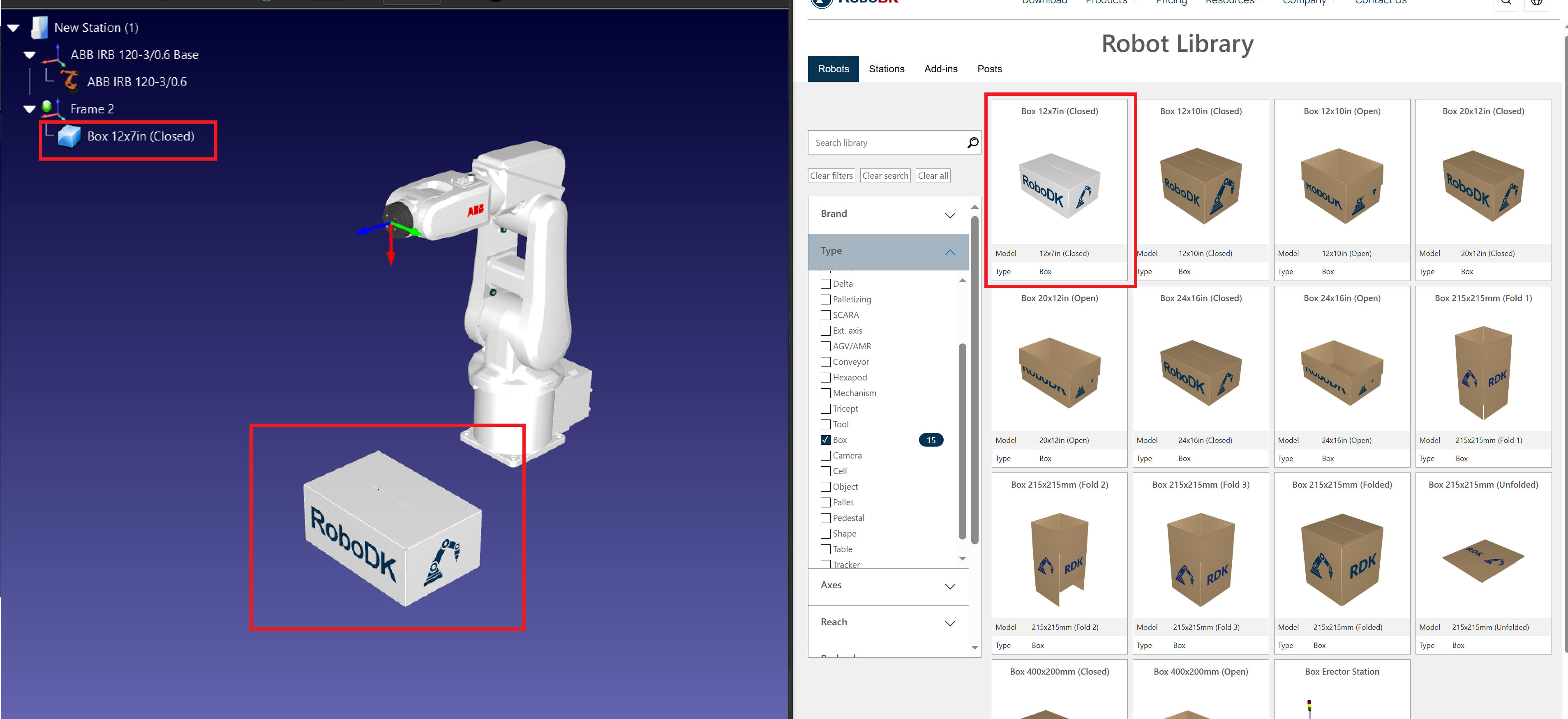
5.Importar objetos 3D
a.Cargar modelos de objetos:
iii.En el menú principal, seleccione Archivo → Abrir.
iv.Examine y seleccione los modelos 3D de los objetos que desee recoger y colocar (por ejemplo, archivos STEP, IGES).
b.Posicione los objetos:
v.Utilice la herramienta Mover para ajustar la colocación del objeto en el sistema de coordenadas.
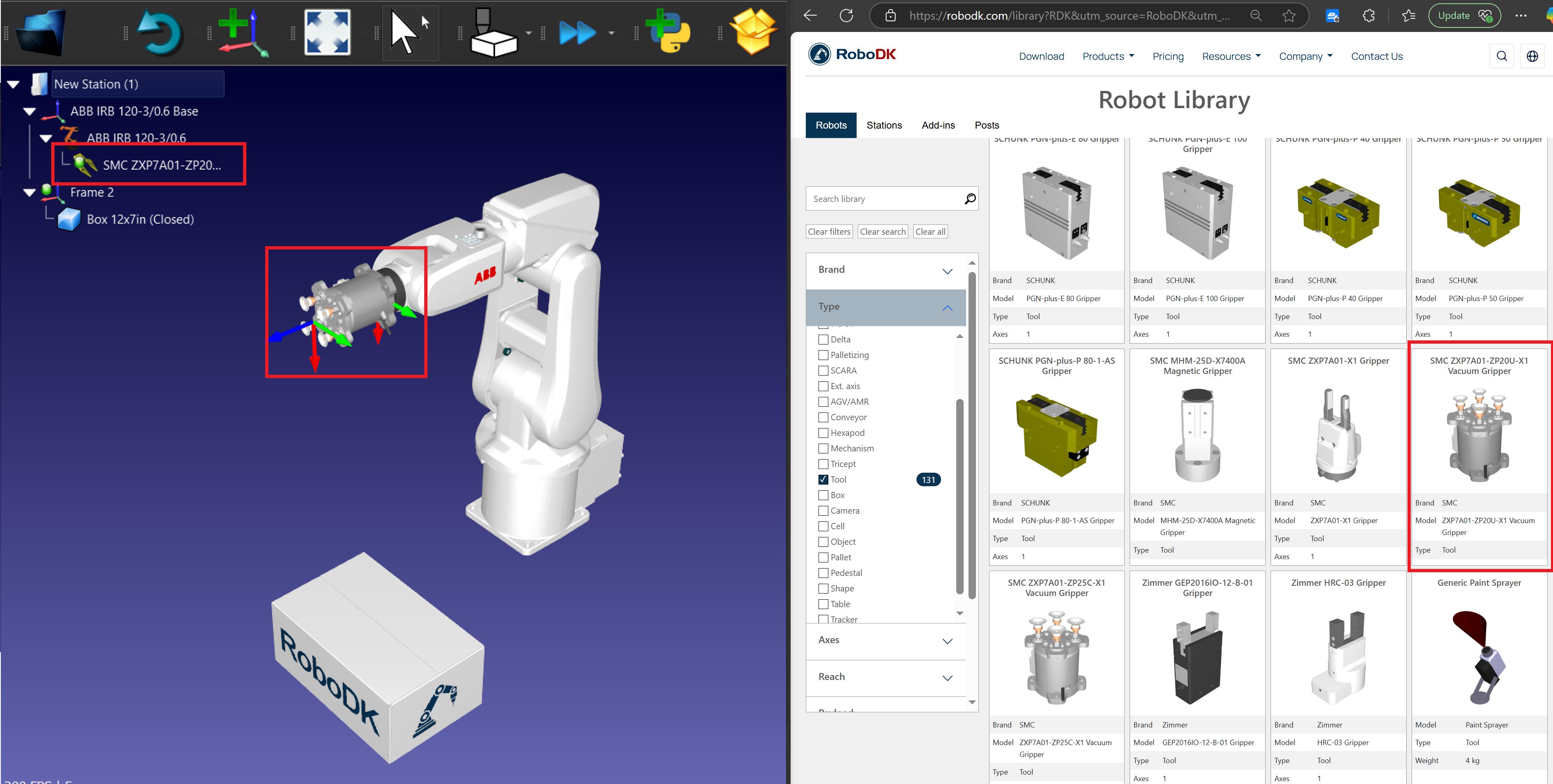
6.Añadir una herramienta (pinza)
a.Seleccione una pinza:
i.En el menú principal, vaya a Utilidades → Añadir herramienta (TCP).
ii.Elija una pinza de la biblioteca de robots o importe un archivo de pinzas personalizado.
b.Acople la herramienta al robot:
i.Haga clic con el botón derecho en la pinza en el árbol de estaciones y seleccione Adjuntar al robot.
ii.Elija la brida adecuada para el robot.
c.Defina el TCP (punto central de la herramienta): Haga doble clic en la herramienta e introduzca las coordenadas del TCP relativas a la brida del robot.
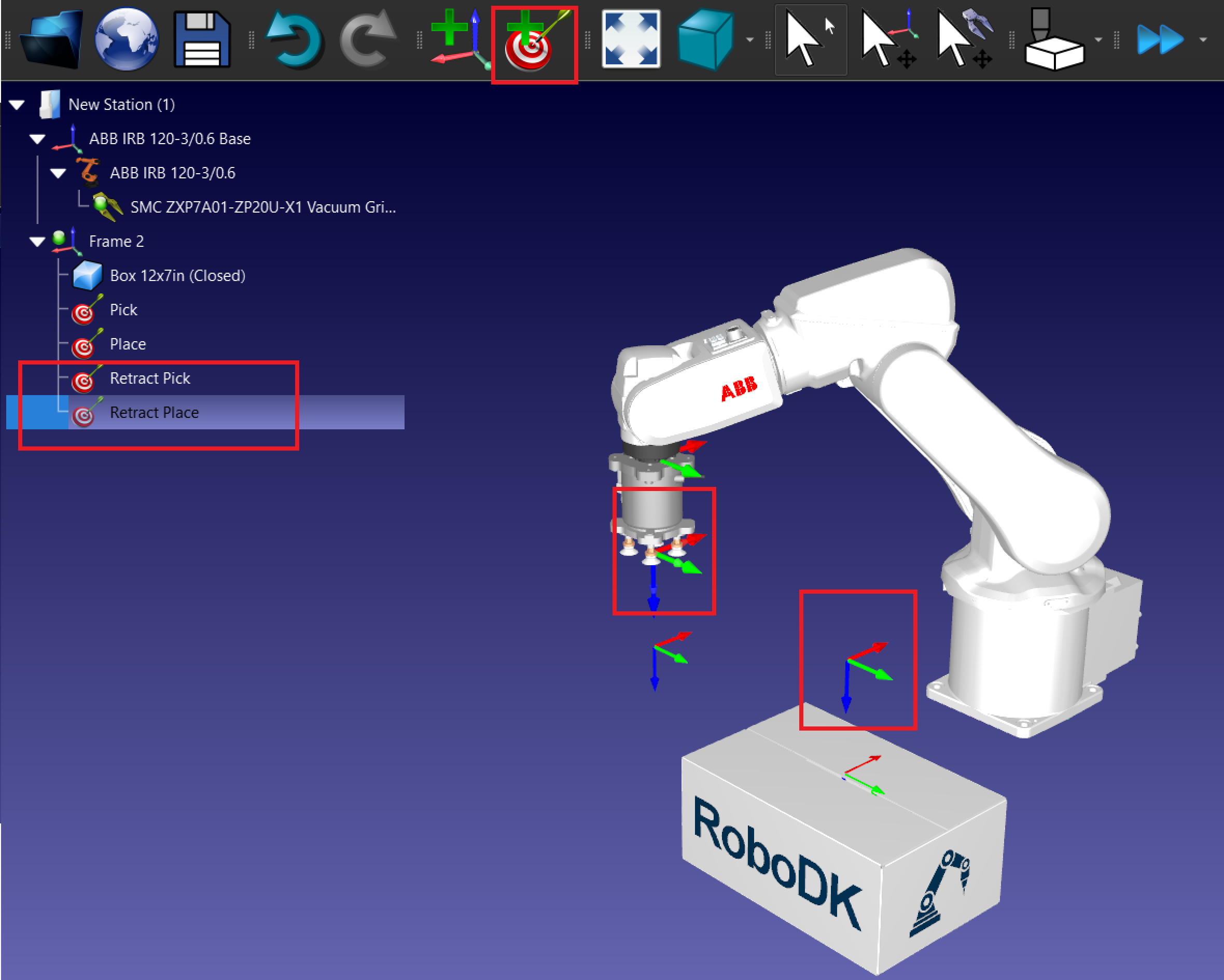
Crear objetivos para Pick and Place
Siga estos pasos para crear un objetivo básico en RoboDK para la aplicación pick and place
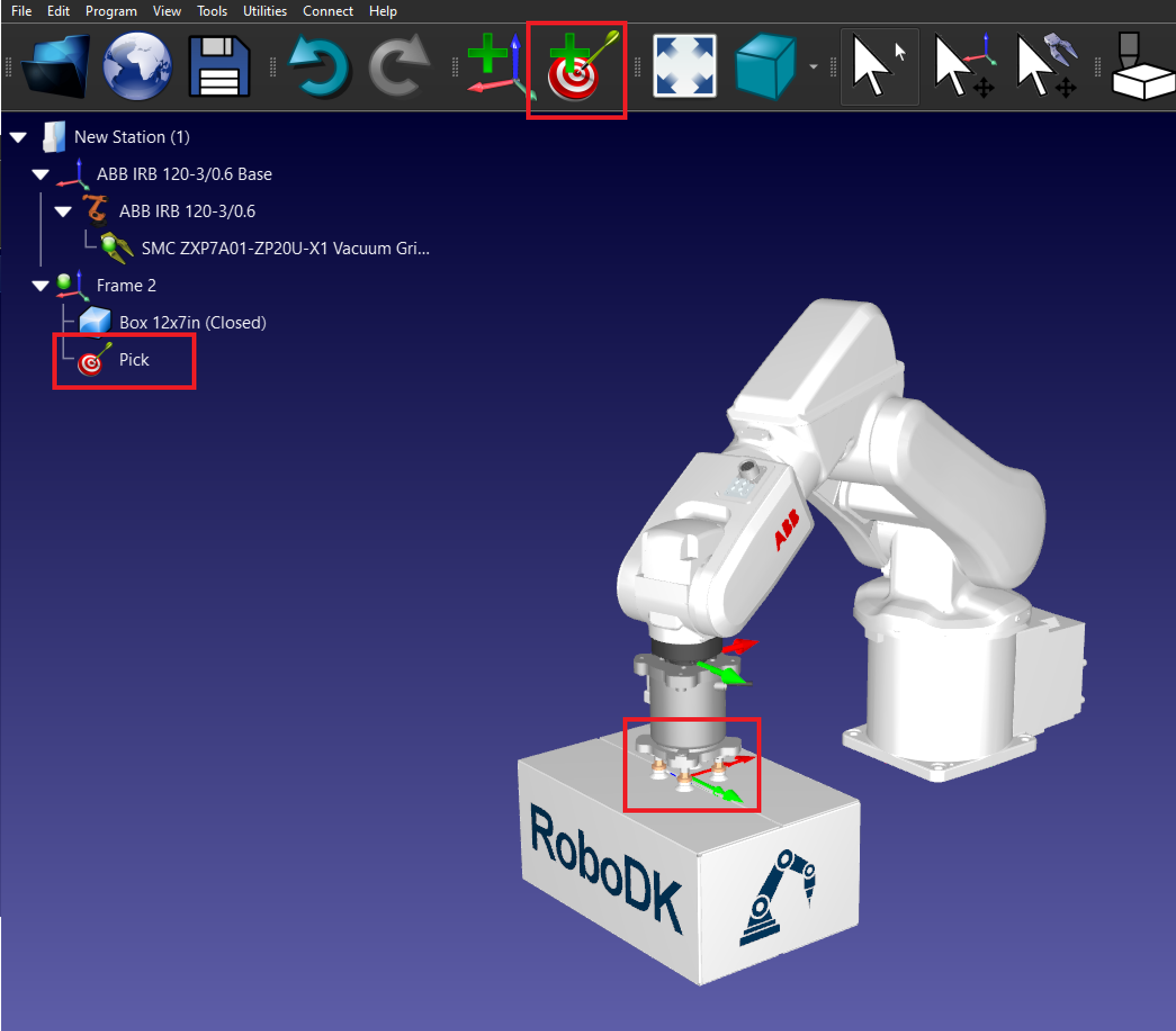
7.Añadir objetivos de selección y colocación:
a.Mueva el robot a la posición de recogida deseada.
b.Seleccione Programa → Enseñar objetivo para guardar la posición.
c.Repita la operación para las posiciones Pick, Retraer Pick, Colocar y Retraer Colocar.
8.Organice los objetivos:
a.Cambie el nombre de los objetivos para mayor claridad (por ejemplo, Aproximación_Pick, Pick, Place). Pulse F2 para renombrar los objetivos.
b.No olvide crear los objetivos bajo los sistemas de coordenadas correspondientes en el árbol de estaciones.
9.Cree el objetivo Pick: Coloque el robot sobre la caja y cree un objetivo llamado Pick.
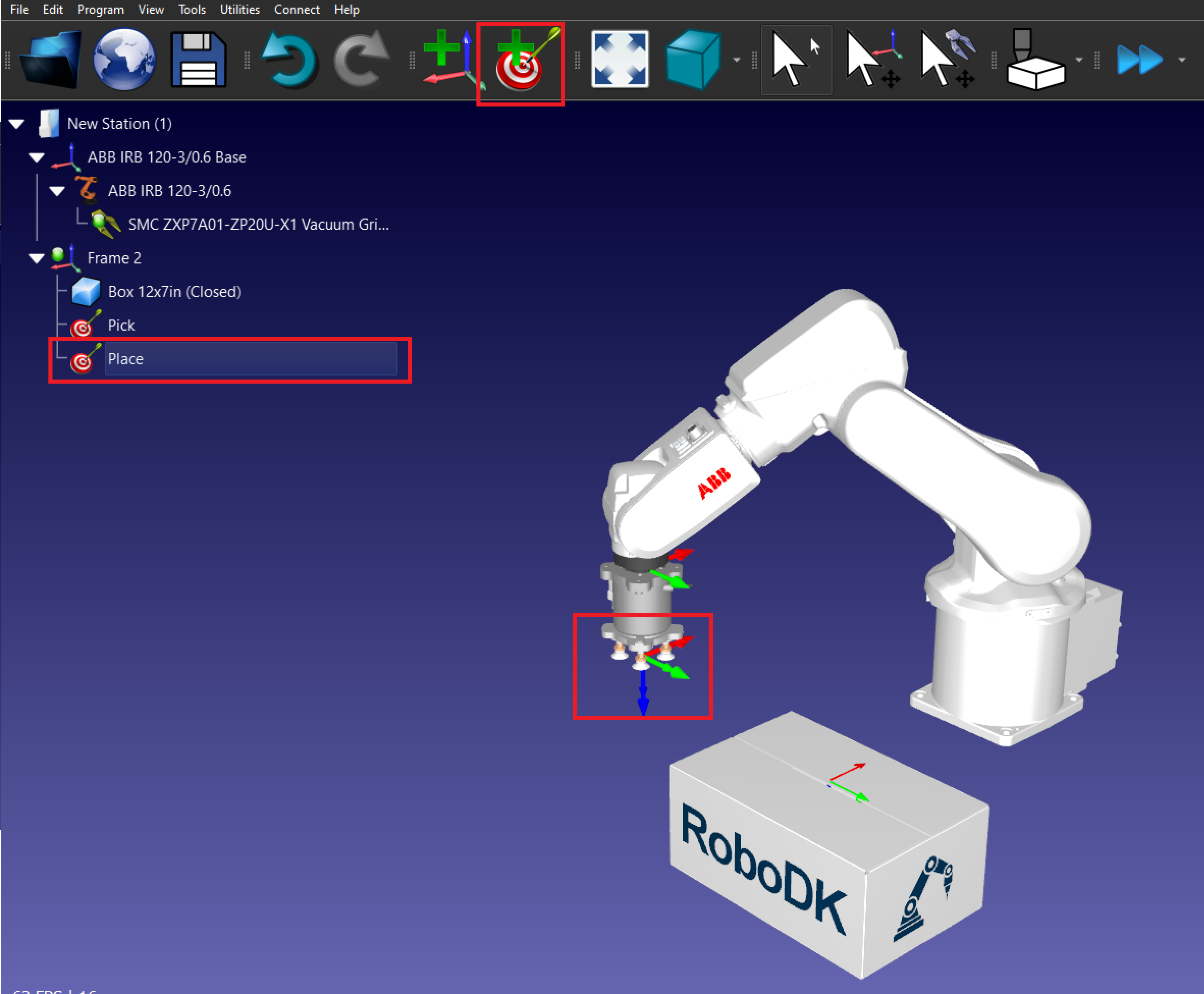
10.Cree el objetivo Colocar: Mueva el robot donde desee colocar la caja y cree un objetivo llamado Colocar.
11.Cree los objetivos de repliegue:
a.Mueva el robot al objetivo Pick y hacia arriba en el eje Z.
b.Cree un nuevo objetivo llamado Pick Retract.
c.Repita la operación con el objetivo Lugar.
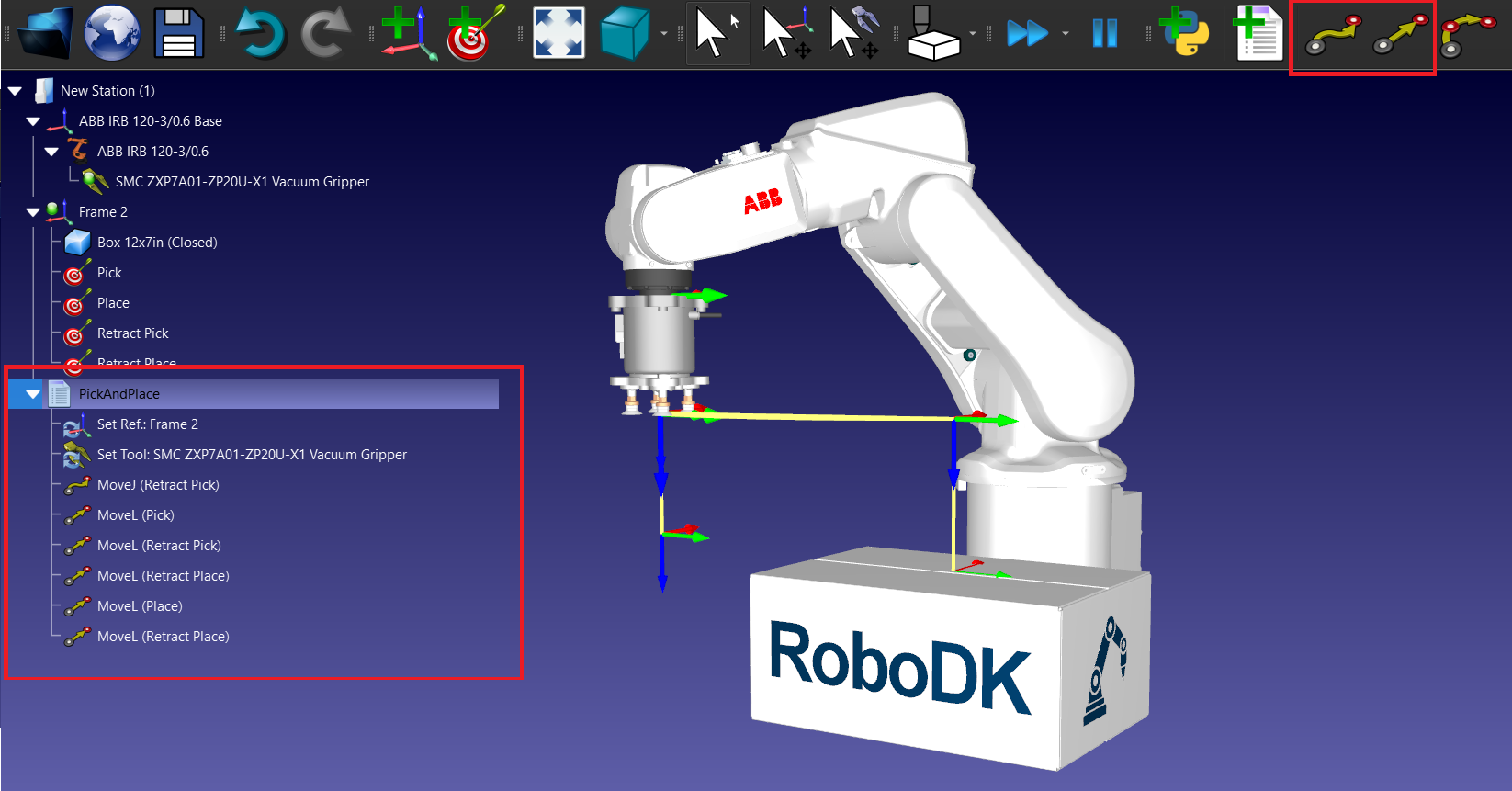
Crear programa de recogida y colocación
Siga estos pasos para crear un programa básico de pick and place en RoboDK con un brazo robótico de 6 ejes utilizando una pinza de vacío para mover una caja.
1.Programe la operación de recoger y colocar :
a.Cree un nuevo Programa: Vaya a Programa → Añadir programa y nómbrelo PickAndPlace.
b.Addin Instrucciones de movimiento:
i.Añada instrucciones MoveJ o MoveL para cada objetivo.
ii.Mueva primero el robot hacia el objetivo de retracción y, a continuación, cree un MoveL hacia el objetivo de recogida y vuelva a retraerlo.
iii.Repita la operación con el objetivo Lugar.
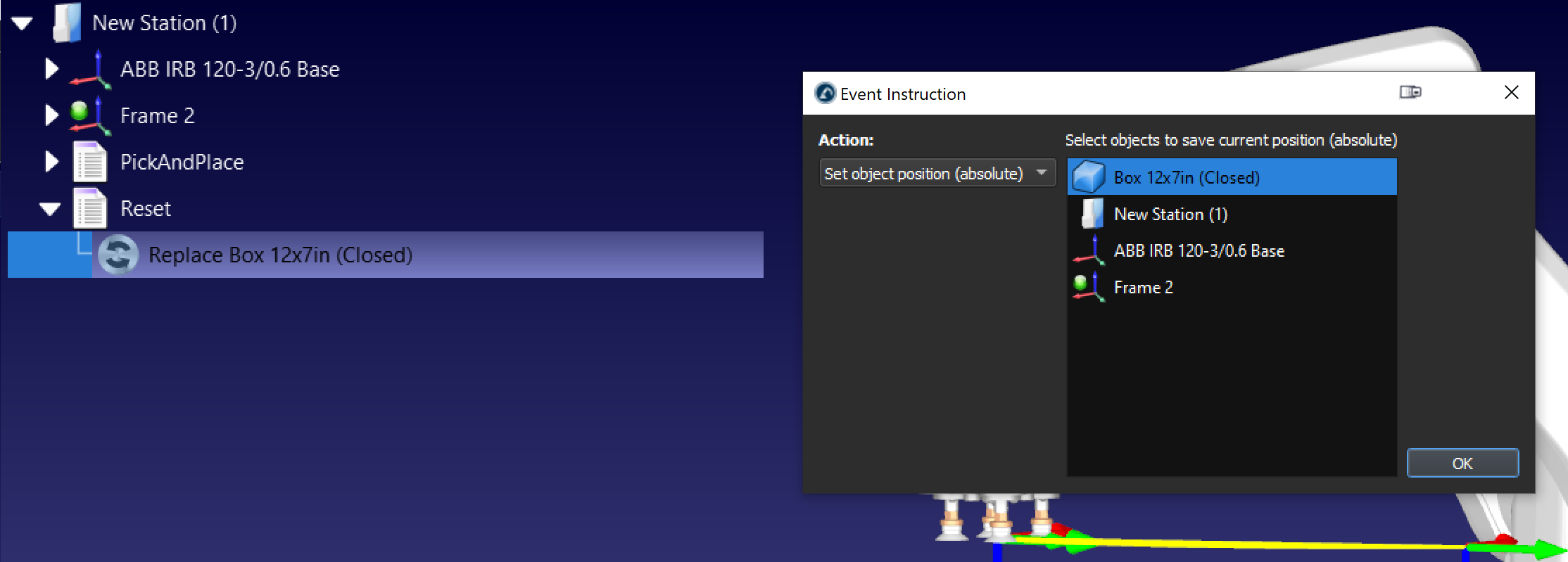
2.Add event para recoger y colocar el objeto.
a.Para añadir un evento, vaya a Programa → Instrucción de eventos de simulación.
b.Añada un evento con la acción Adjuntar objeto para recoger la caja después del MoveL (Recoger).
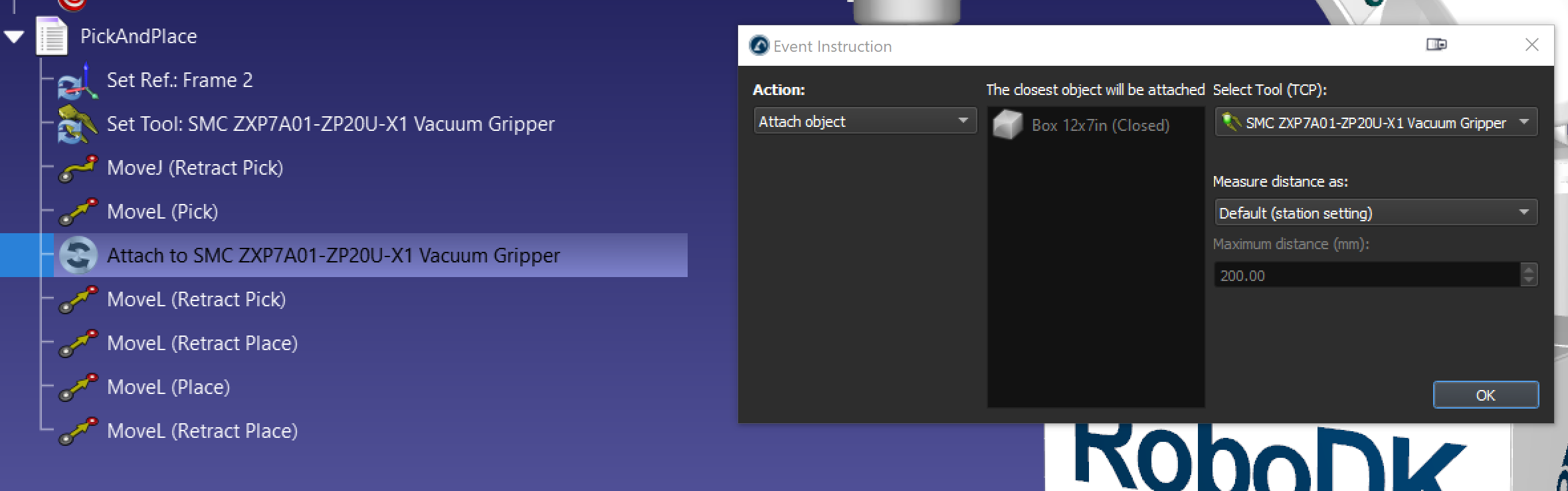
c.Añada un evento con la acción Desprender objeto coloque la caja después del MoveL (Colocar). La opción Adjuntar a padre permite adjuntar el objeto a uno nuevo una vez que se ha desprendido de la pinza.
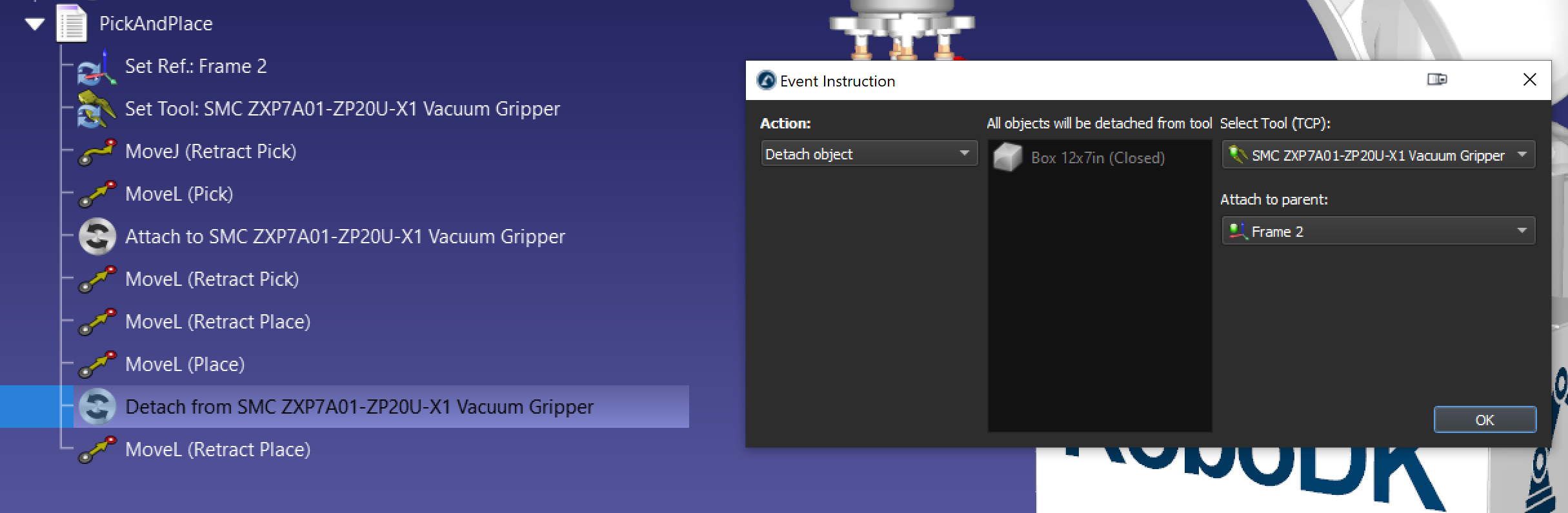
d.Es una buena práctica crear también un programa separado con una acción de evento Establecer posición del objeto que restablezca la caja a su posición de origen si es necesario.
Siguiendo estos pasos, podrá crear con éxito una estación básica de pick-and-place en RoboDK.
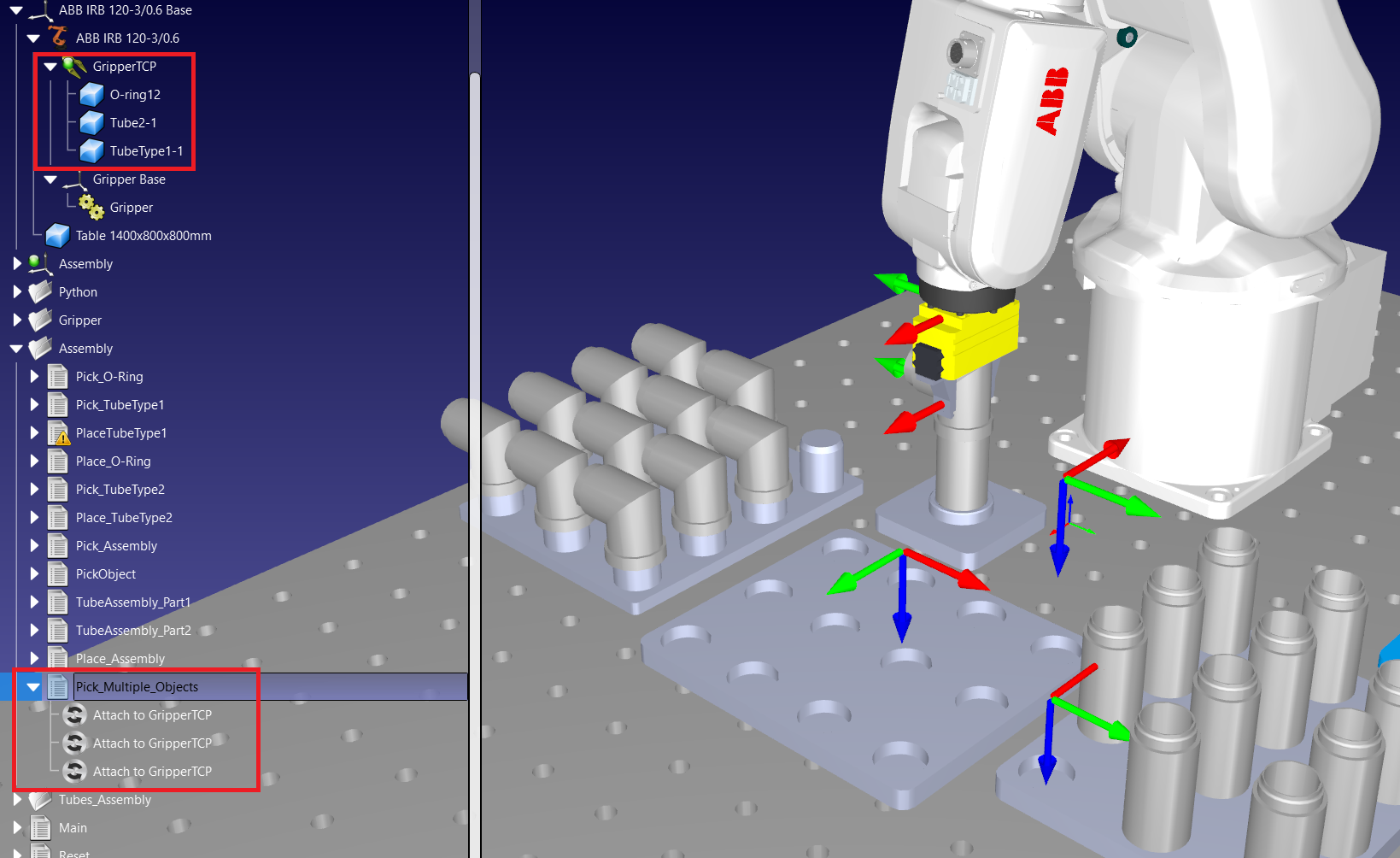
Pick and Place y Montaje
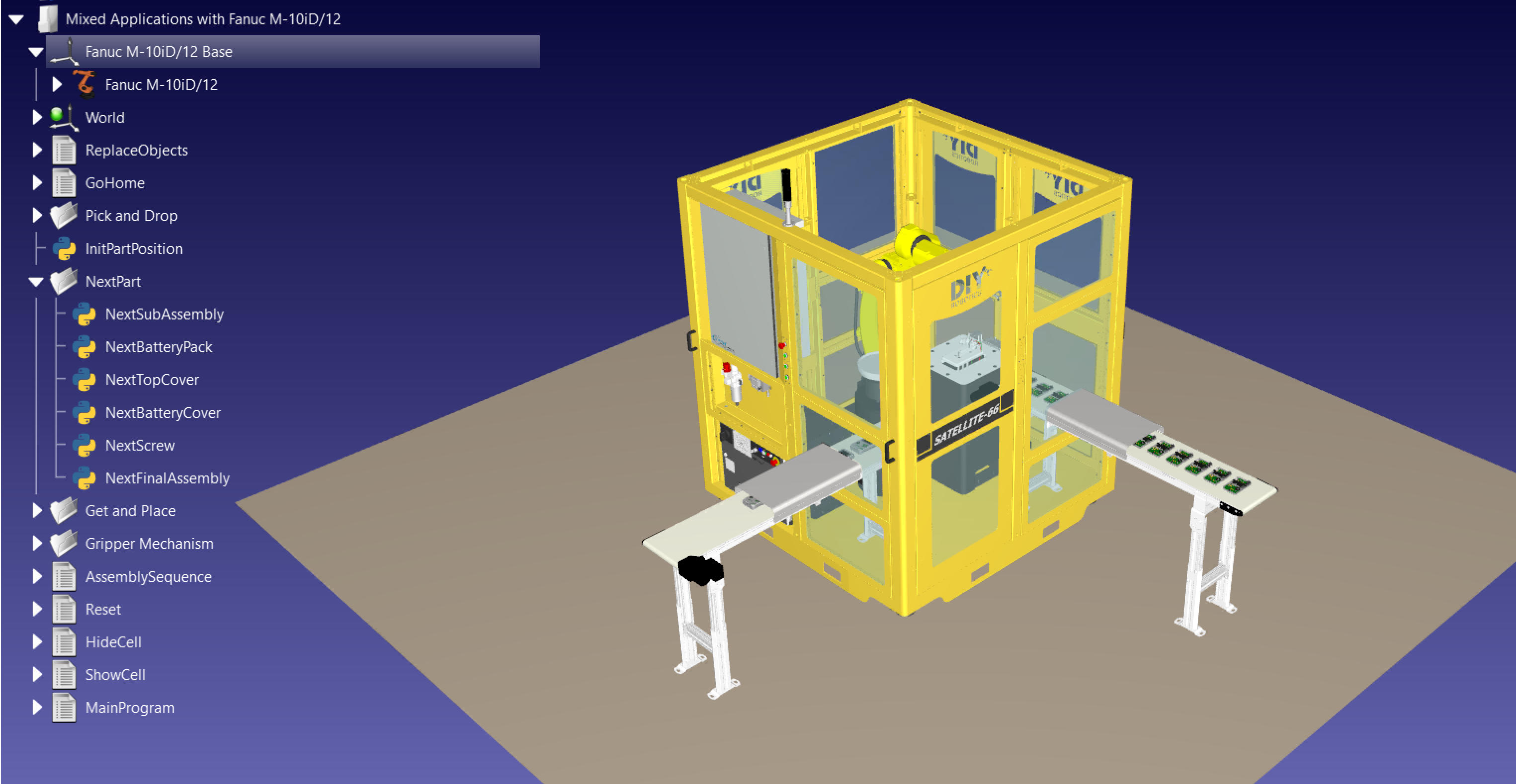
Las aplicaciones de recogida y colocación pueden utilizarse para automatizar una operación de ensamblaje. Utilizando el evento "adjuntar objeto" varias veces, puede recoger varios objetos a la vez y crear una recogida de ensamblaje. Por ejemplo, si tiene 3 objetos en el montaje a, puede utilizar el evento 3 veces como se muestra en la siguiente imagen.
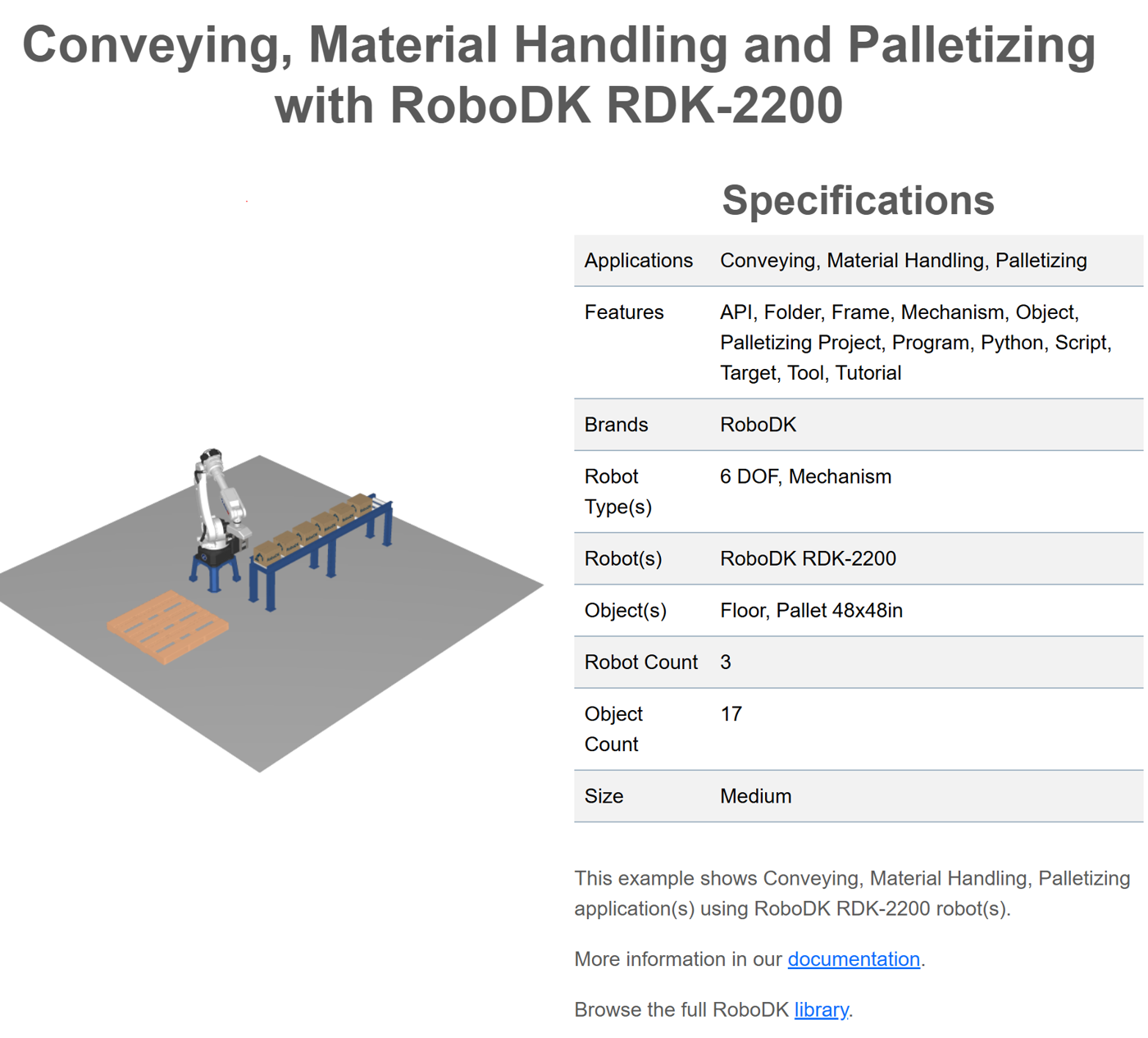
Recoger y colocar utilizando el Addin de paletizado
Si tiene una operación repetitiva de recogida y colocación que implique un patrón de paletizado, puede utilizar nuestro plugin de paletizado para simplificar la tarea. Simplemente utilice el siguiente enlace y descargue nuestro plugin de paletización: Paletización | Marketplace de Addins. Siga nuestra documentación de paletización para obtener más información sobre el plugin de paletización
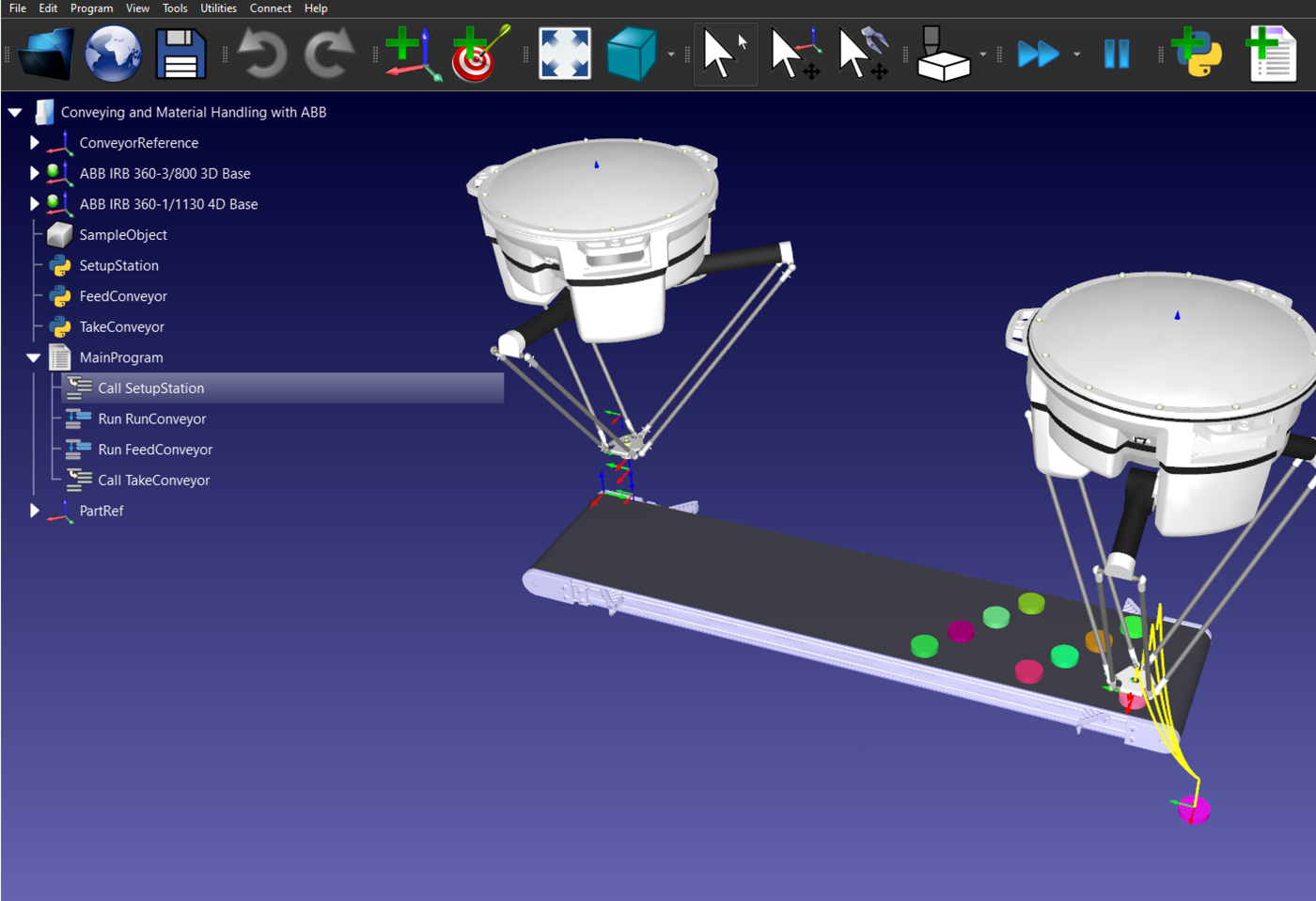
Elija y coloque utilizando la API
Si necesita operaciones de pick and place más avanzadas, como recoger grandes conjuntos o recoger objetos de una cinta transportadora en movimiento, puede utilizar la API para programar sus aplicaciones de pick and place.
Este ejemplo utiliza la API de RoboDK con Python para recoger y colocar objetos en una cinta transportadora en movimiento, puede descargarlo de nuestra biblioteca.
También puede echar un vistazo a esta estación de ensamblaje que utiliza múltiples piezas para crear un ensamblaje final, utilizando muchas operaciones de pick and place: Aplicaciones mixtas con Fanuc M-10iD/12.