Crear un nuevo proyecto RoboDK
Estos pasos le mostrarán cómo crear un nuevo proyecto (también conocido como estación) en RoboDK para una aplicación de pick and place.
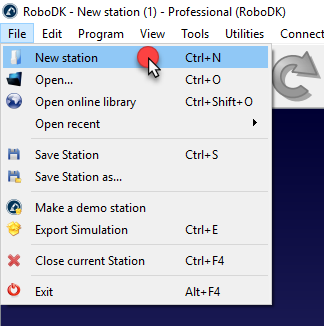
1.Abra RoboDK: Inicie la aplicación RoboDK en su ordenador.
2.Cree una nueva estación: Seleccione Archivo-Nueva estación en el menú principal de RoboDK-Se creará una nueva estación vacía como espacio de trabajo.
3.Añadir un robot desde la biblioteca
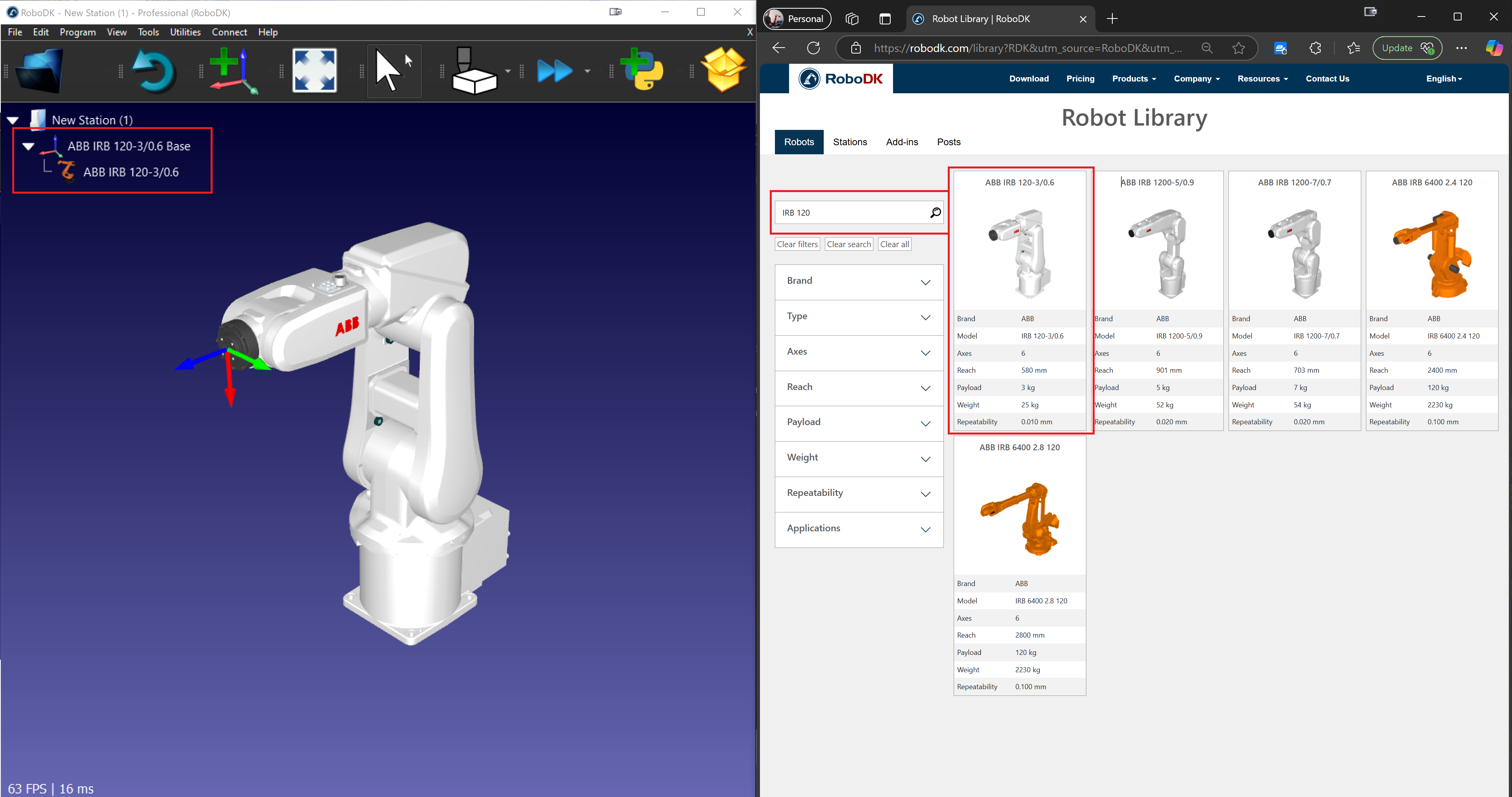
a.Abra la biblioteca de robots en línea para descargar un robot
i.En el menú principal, seleccione Archivo → Abrir biblioteca en línea.
ii.Se abrirá la ventana de la biblioteca RoboDK, en la que se mostrarán diversos robots industriales.
b.Seleccione e importe un robot:
i.Utilice la barra de búsqueda para encontrar un robot adecuado para tareas de pick-and-place (por ejemplo, UR10, ABB IRB 120, Fanuc LR Mate).
ii.Haga clic en el robot deseado y seleccione Descargar.
c.Coloque el robot en la estación:
i.El robot aparecerá automáticamente en la estación.
ii.Utilice la herramienta Mover para ajustar su colocación si es necesario.
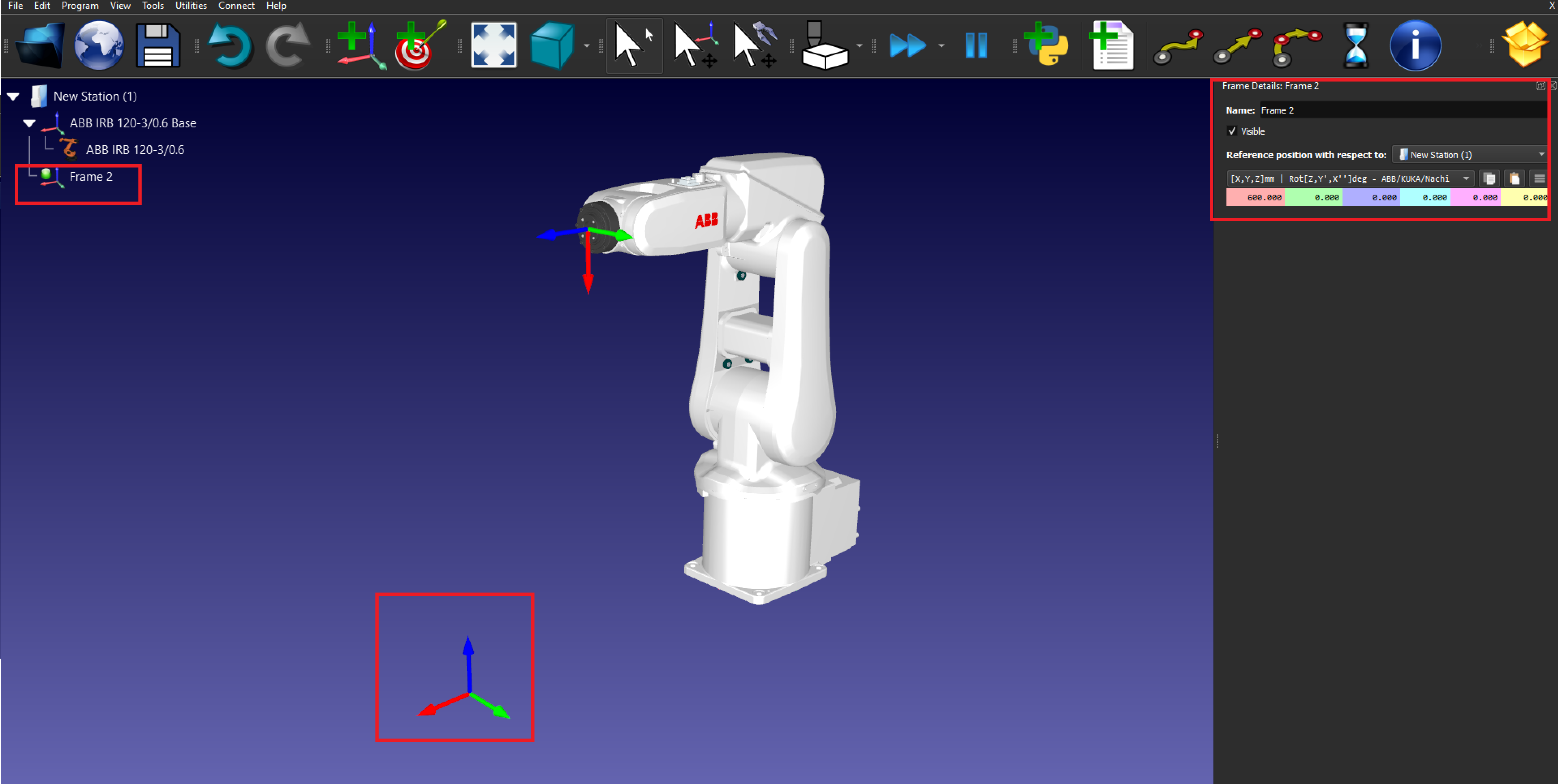
4.Añadir un sistema de coordenadas
a.Cree un sistema de coordenadas:
i.Vaya a Programa → Añadir sistema de coordenadas.
ii.Aparecerá un nuevo sistema de coordenadas en el árbol de estaciones y en la vista 3D.
b.Posicione el sistema de coordenadas:
i.Haga doble clic en el sistema de coordenadas para introducir las coordenadas (X, Y, Z) y los valores de rotación.
ii.Pulse OK para guardar la posición.
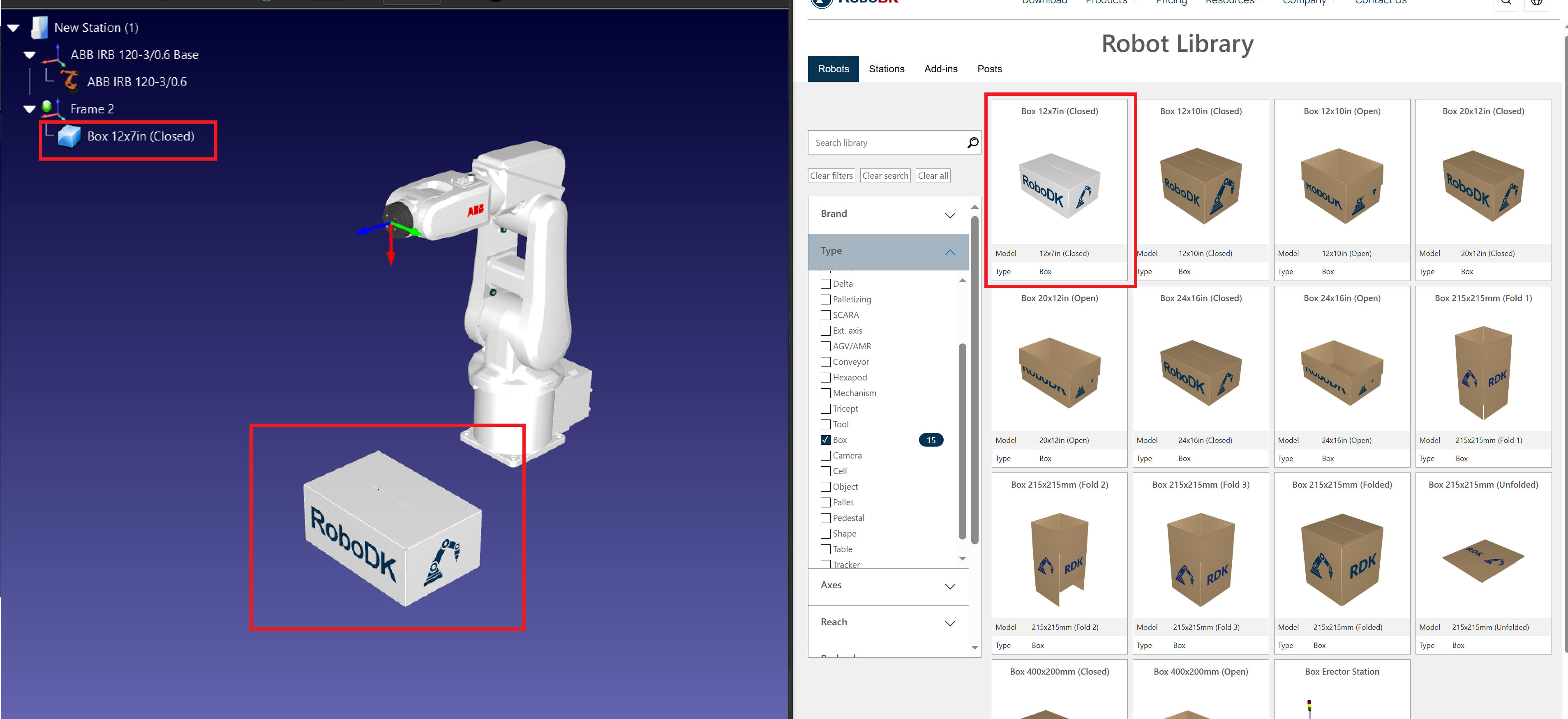
5.Importar objetos 3D
a.Cargar modelos de objetos:
iii.En el menú principal, seleccione Archivo → Abrir.
iv.Examine y seleccione los modelos 3D de los objetos que desee recoger y colocar (por ejemplo, archivos STEP, IGES).
b.Posicione los objetos:
v.Utilice la herramienta Mover para ajustar la colocación del objeto en el sistema de coordenadas.
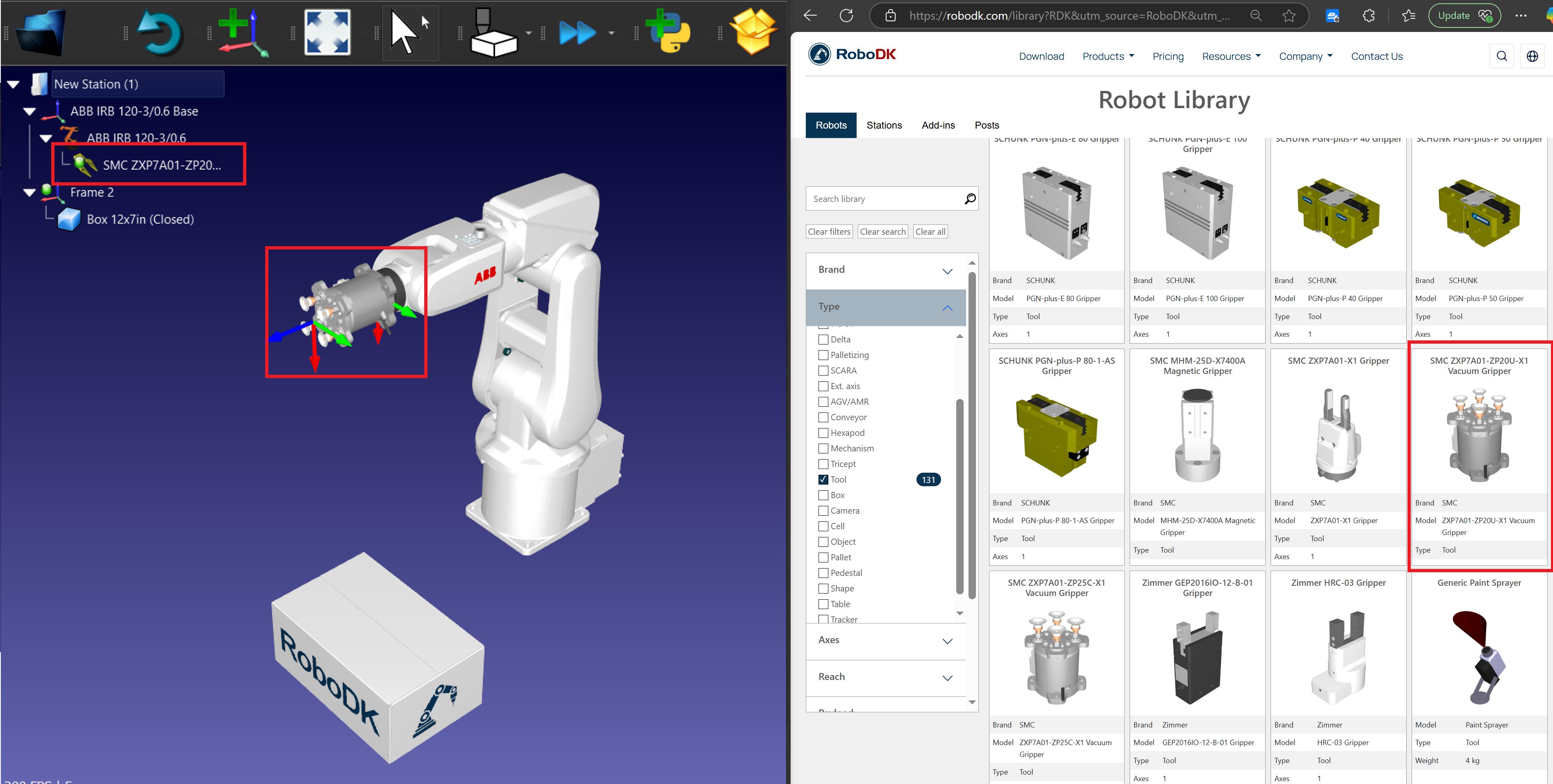
6.Añadir una herramienta (pinza)
a.Seleccione una pinza:
i.En el menú principal, vaya a Utilidades → Añadir herramienta (TCP).
ii.Elija una pinza de la biblioteca de robots o importe un archivo de pinzas personalizado.
b.Acople la herramienta al robot:
i.Haga clic con el botón derecho en la pinza en el árbol de estaciones y seleccione Adjuntar al robot.
ii.Elija la brida adecuada para el robot.
c.Defina el TCP (punto central de la herramienta): Haga doble clic en la herramienta e introduzca las coordenadas del TCP relativas a la brida del robot.