Crear objetivos para Pick and Place
Siga estos pasos para crear un objetivo básico en RoboDK para la aplicación pick and place
7.Añadir objetivos de selección y colocación:
a.Mueva el robot a la posición de recogida deseada.
b.Seleccione Programa → Enseñar objetivo para guardar la posición.
c.Repita la operación para las posiciones Pick, Retraer Pick, Colocar y Retraer Colocar.
8.Organice los objetivos:
a.Cambie el nombre de los objetivos para mayor claridad (por ejemplo, Aproximación_Pick, Pick, Place). Pulse F2 para renombrar los objetivos.
b.No olvide crear los objetivos bajo los sistemas de coordenadas correspondientes en el árbol de estaciones.
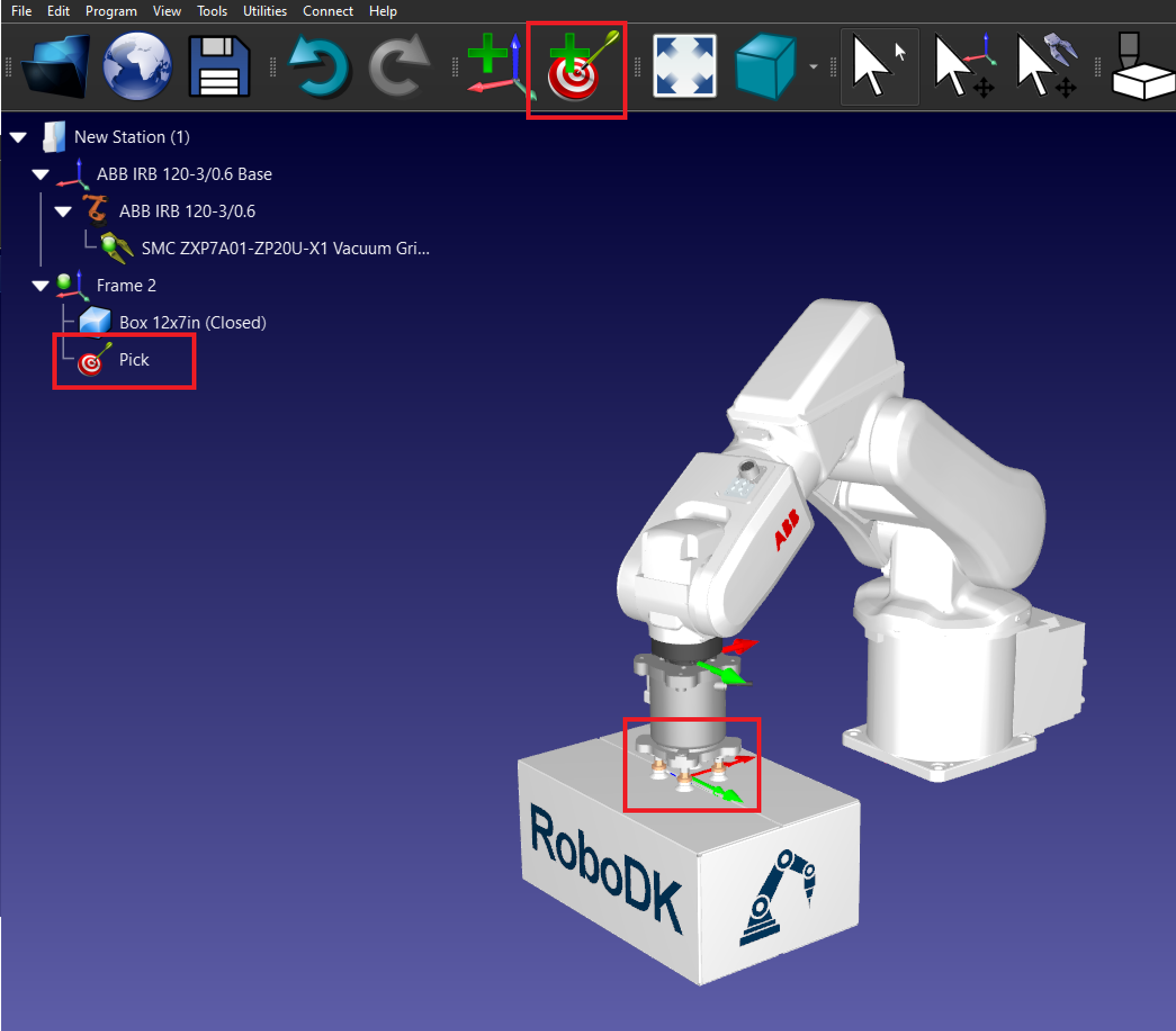
9.Cree el objetivo Pick: Coloque el robot sobre la caja y cree un objetivo llamado Pick.
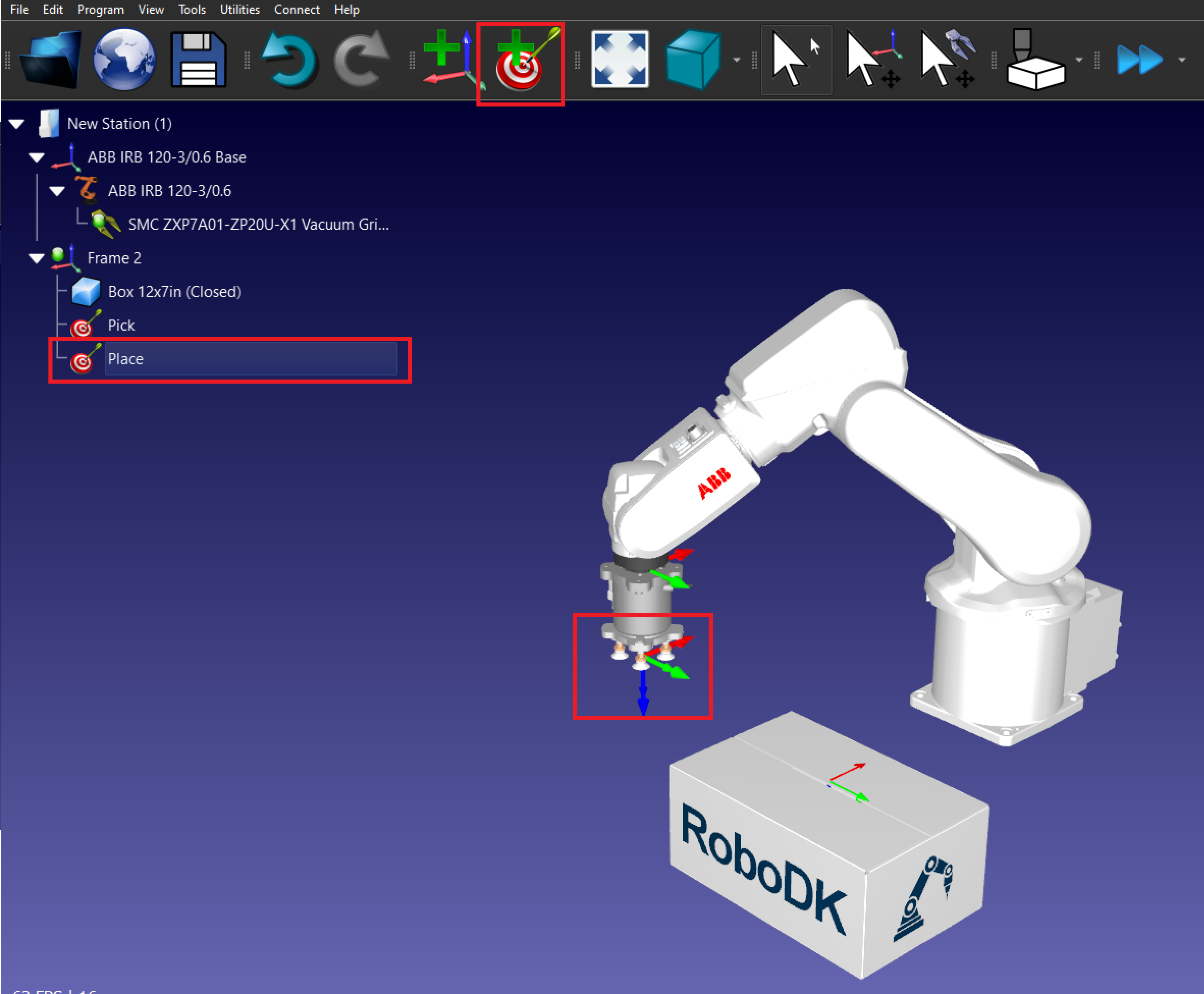
10.Cree el objetivo Colocar: Mueva el robot donde desee colocar la caja y cree un objetivo llamado Colocar.
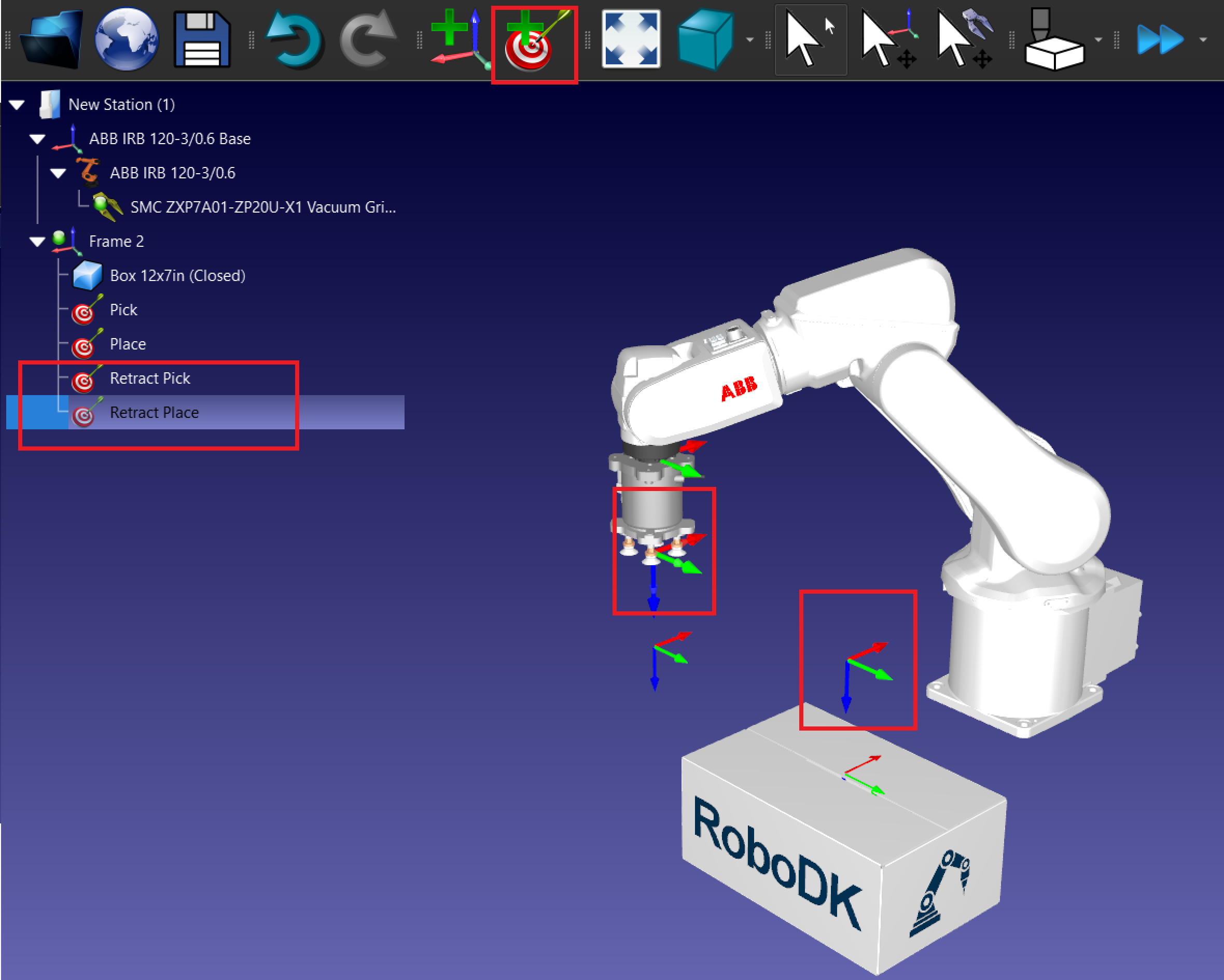
11.Cree los objetivos de repliegue:
a.Mueva el robot al objetivo Pick y hacia arriba en el eje Z.
b.Cree un nuevo objetivo llamado Pick Retract.
c.Repita la operación con el objetivo Colocar.