Crear programa de recogida y colocación
Siga estos pasos para crear un programa básico de pick and place en RoboDK con un brazo robótico de 6 ejes utilizando una pinza de vacío para mover una caja.
1.Programe la operación de recoger y colocar :
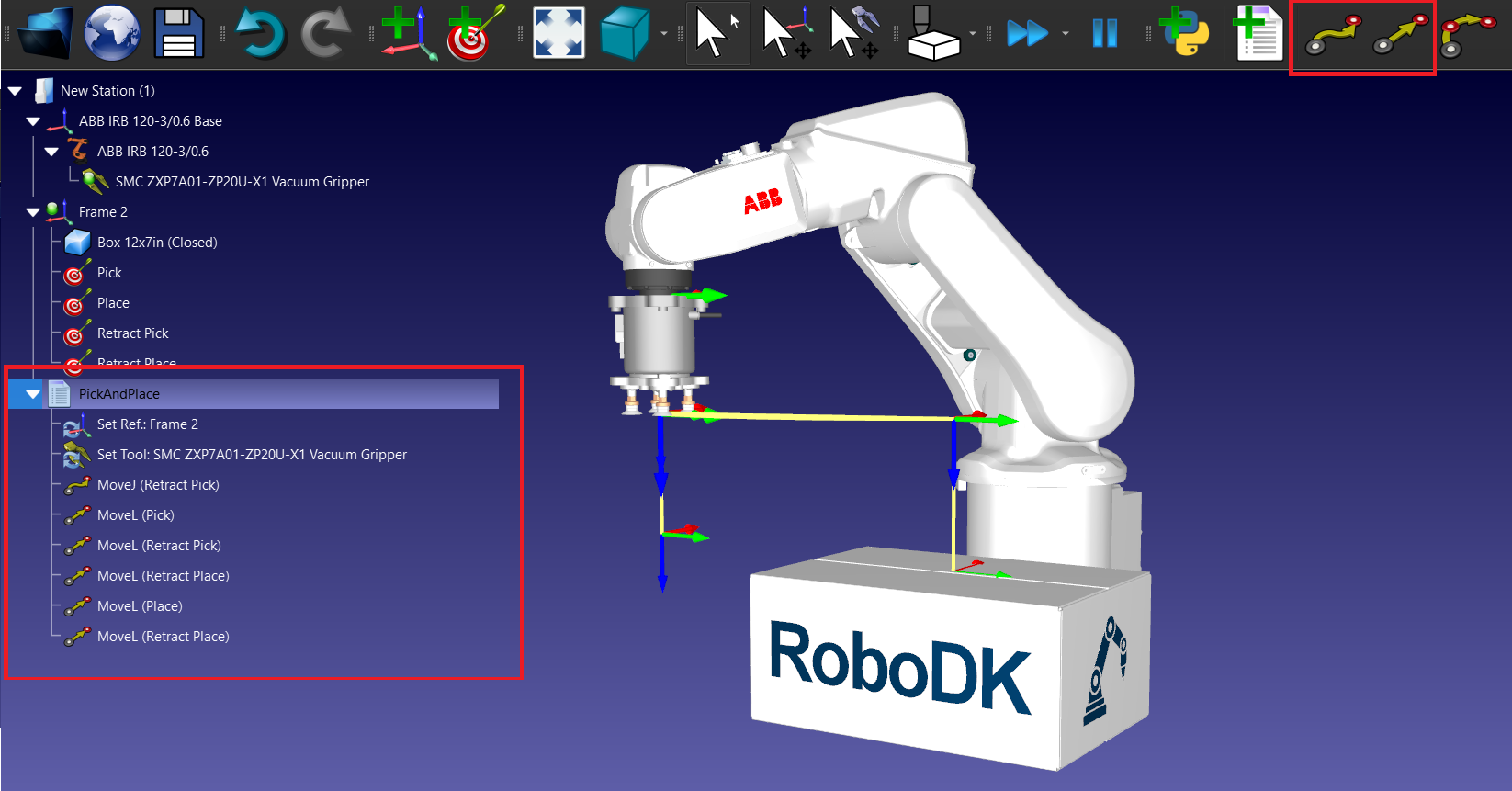
a.Cree un nuevo Programa: Vaya a Programa → Añadir programa y nómbrelo PickAndPlace.
b.Addin Instrucciones de movimiento:
i.Añada instrucciones MoveJ o MoveL para cada objetivo.
ii.Mueva primero el robot hacia el objetivo de retracción y, a continuación, cree un MoveL hacia el objetivo de recogida y vuelva a retraerlo.
iii.Repita la operación con el objetivo Lugar.
2.Add event para recoger y colocar el objeto.
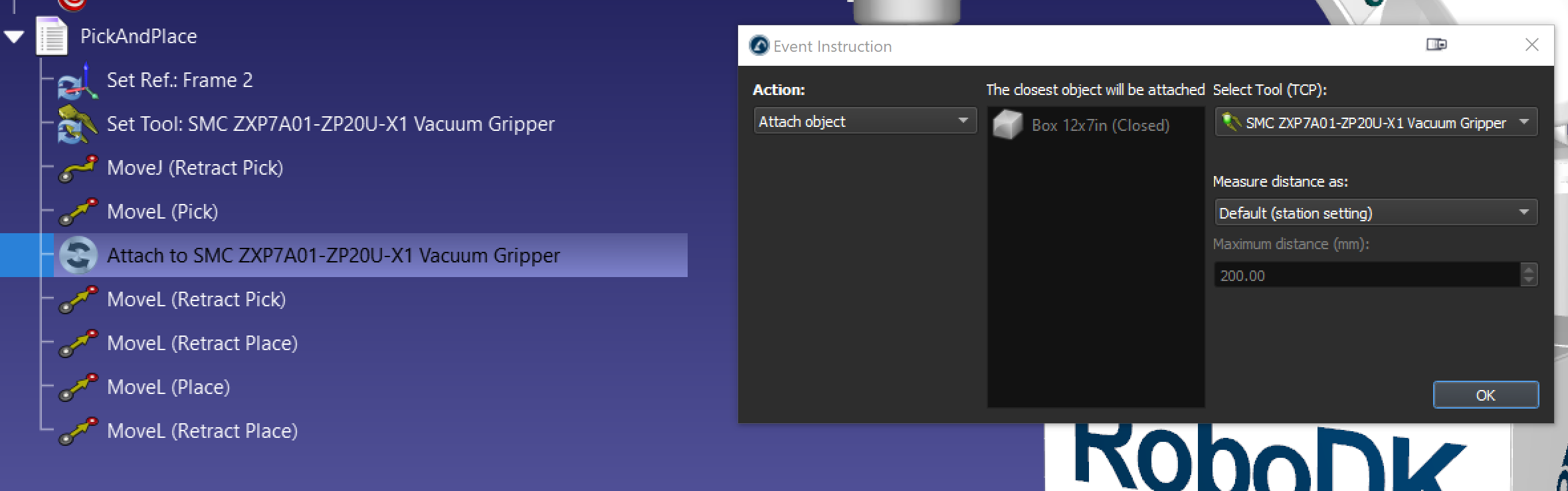
a.Para añadir un evento, vaya a Programa → Instrucción de eventos de simulación.
b.Añada un evento con la acción Adjuntar objeto para recoger la caja después del MoveL (Recoger).
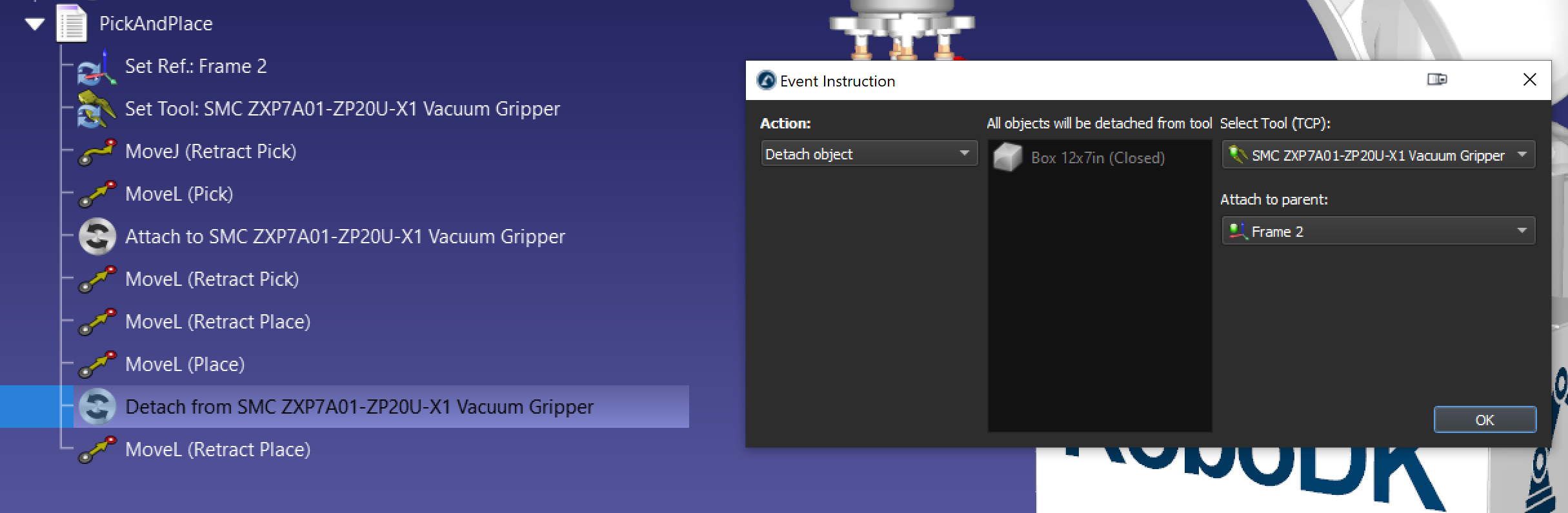
c.Añada un evento con la acción Desprender objeto coloque la caja después del MoveL (Colocar). La opción Adjuntar a padre permite adjuntar el objeto a uno nuevo una vez que se ha desprendido de la pinza.
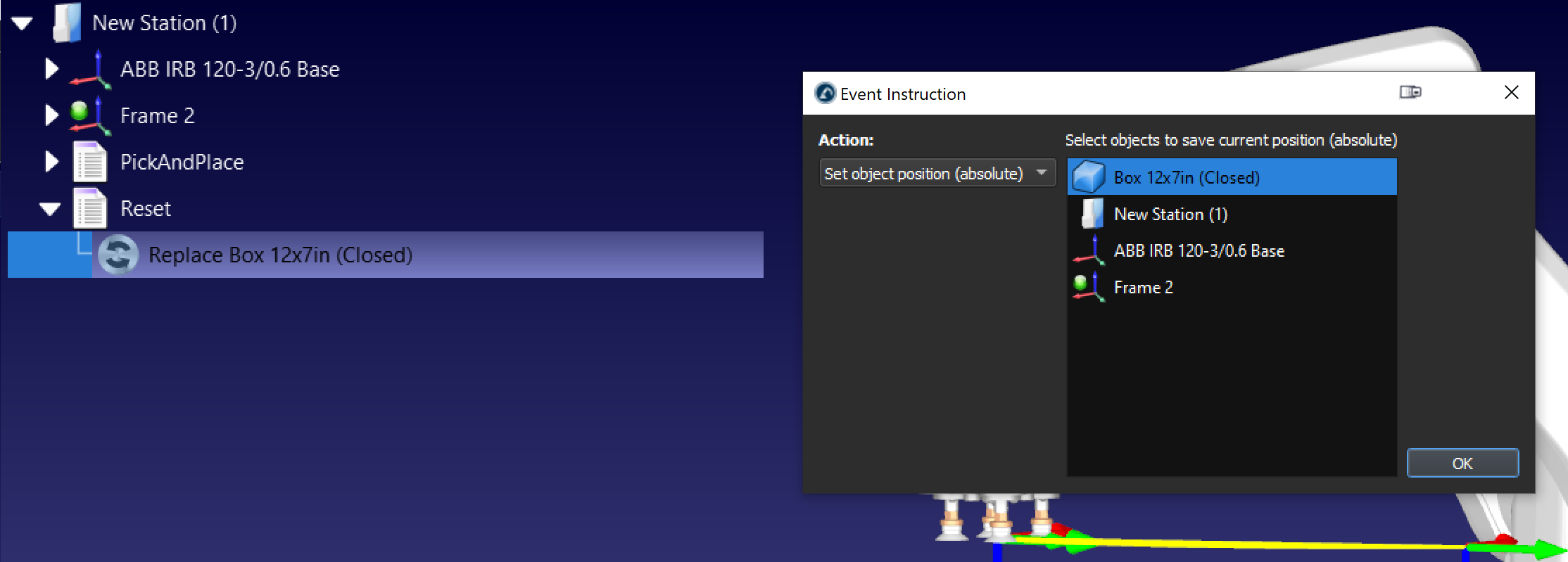
d.Es una buena práctica crear también un programa separado con una acción de evento Establecer posición del objeto que restablezca la caja a su posición de origen si es necesario.
Siguiendo estos pasos, podrá crear con éxito una estación básica de pick-and-place en RoboDK.