Elija y coloque utilizando la API
Si necesita operaciones de pick and place más avanzadas, como recoger grandes conjuntos o recoger objetos de una cinta transportadora en movimiento, puede utilizar la API para programar sus aplicaciones de pick and place.
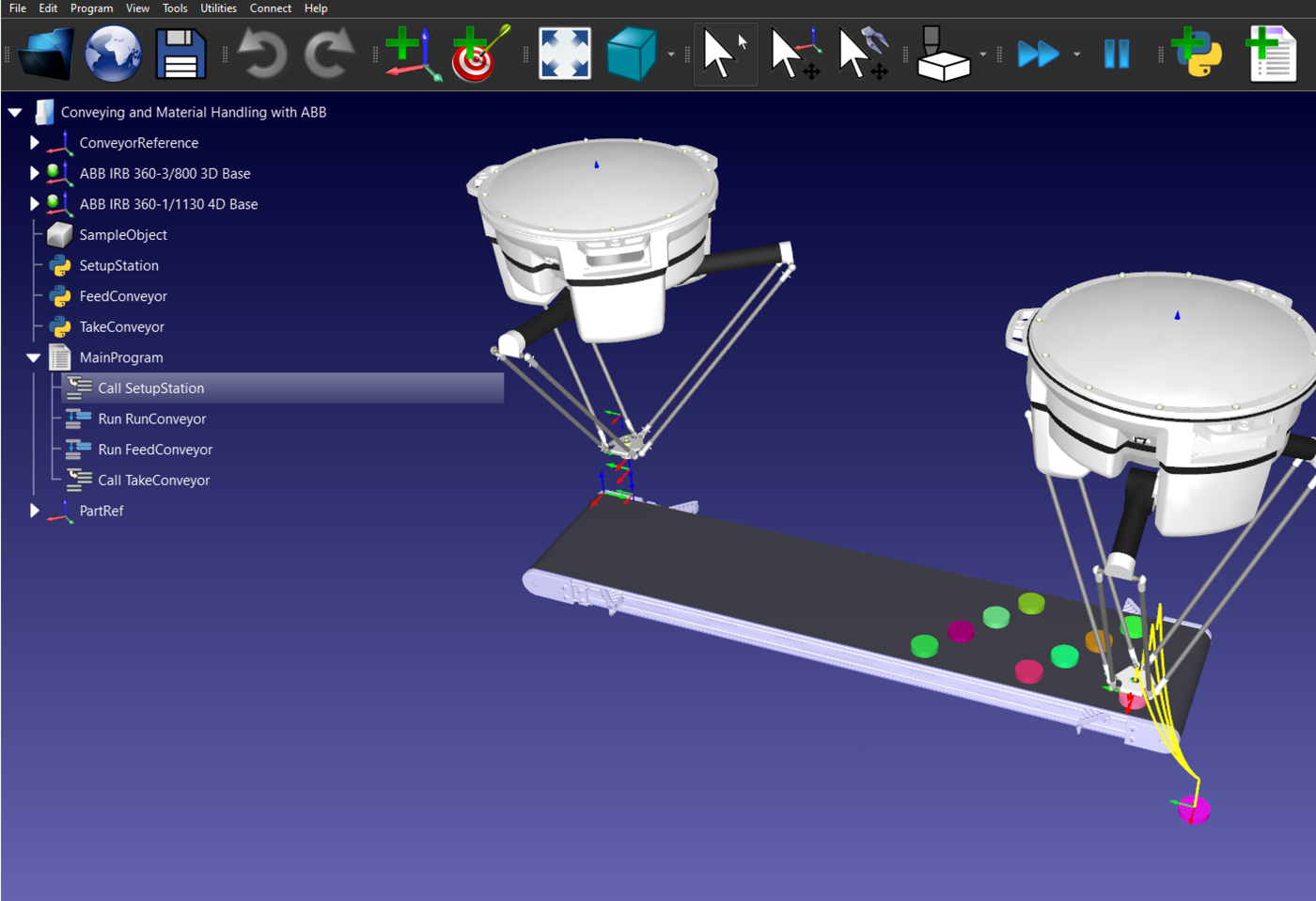
Este ejemplo utiliza la API de RoboDK con Python para recoger y colocar objetos en una cinta transportadora en movimiento, puede descargarlo de nuestra biblioteca.
Consejo: Puede encontrar más información sobre la API del RoboDK aquí.
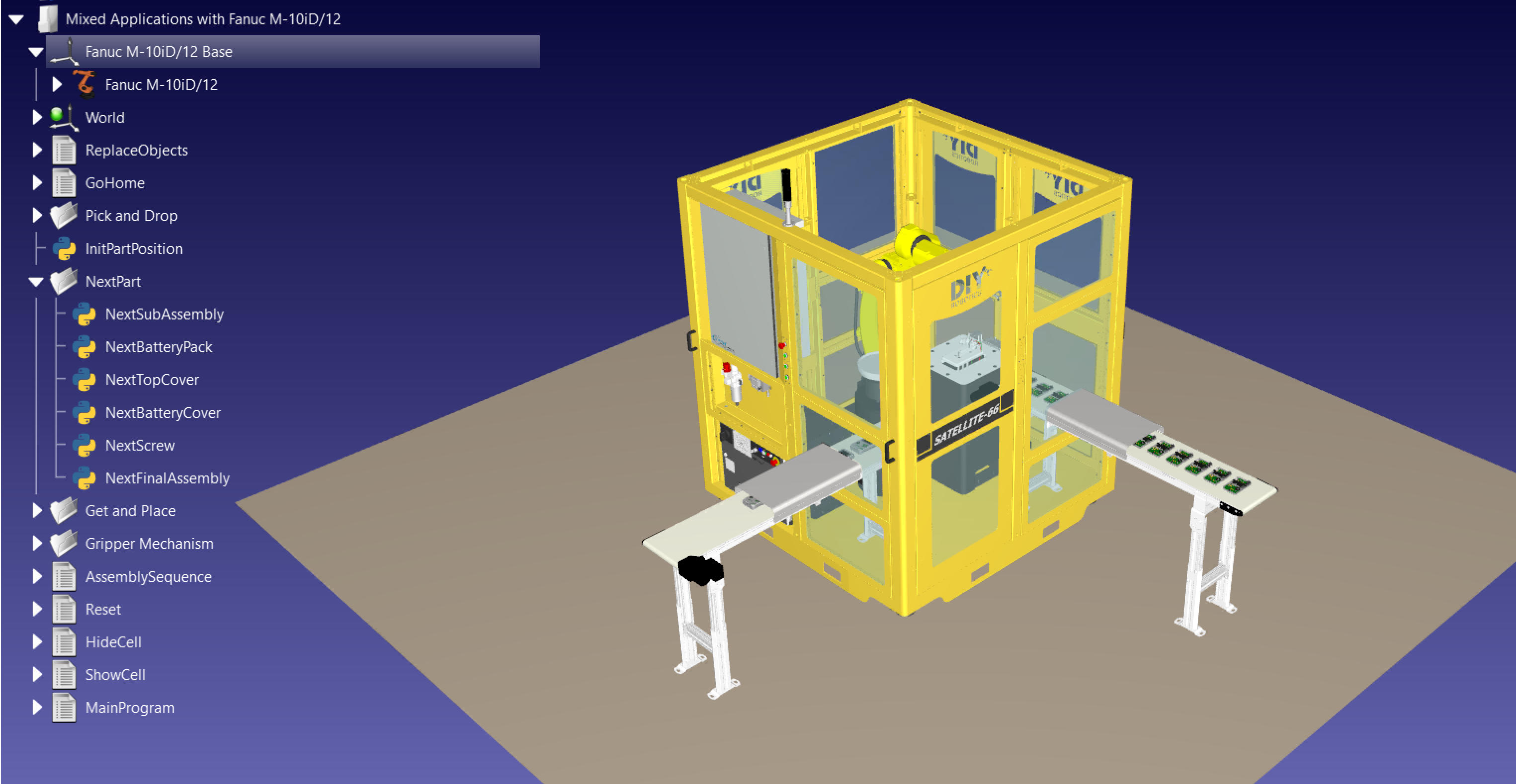
También puede echar un vistazo a esta estación de ensamblaje que utiliza múltiples piezas para crear un ensamblaje final, utilizando muchas operaciones de pick and place: Aplicaciones mixtas con Fanuc M-10iD/12.