Estación RoboDK
Una vez que tenemos lista la trayectoria de la herramienta del robot en RoboDK debemos asegurarnos de que la célula virtual del robot coincide con la configuración real. En RoboDK nos aseguramos de que estamos utilizando la herramienta y el sistema de coordenadas correctos para la operación de fabricación antes de generar el programa del robot.
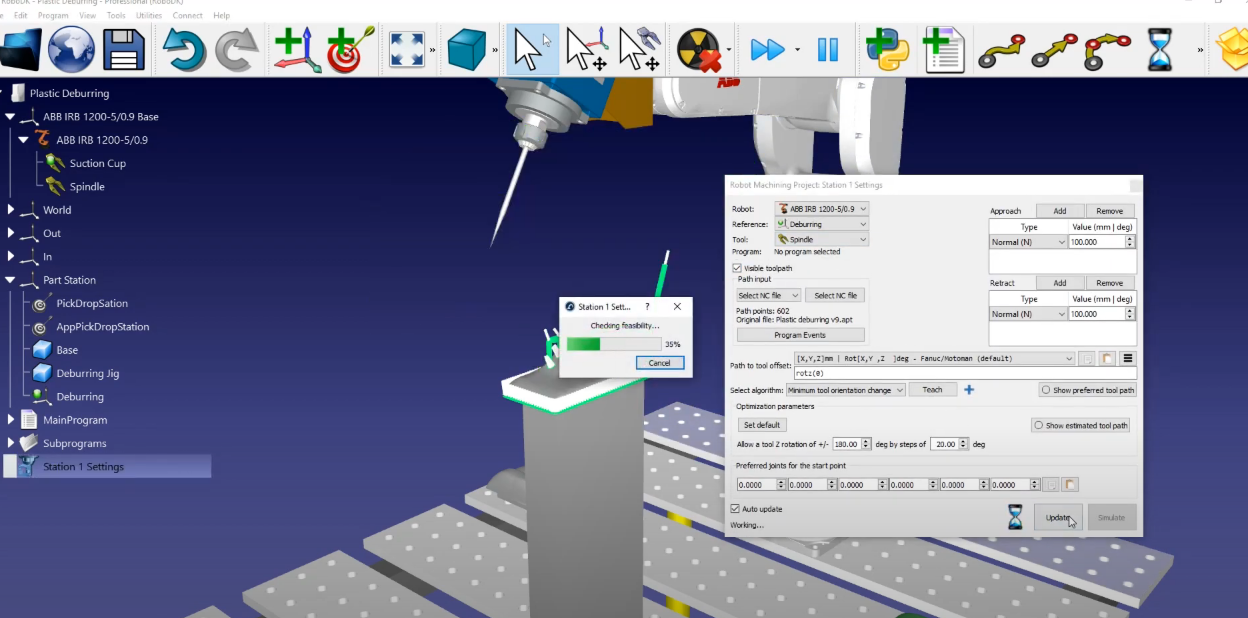
En este ejemplo seleccionamos la referencia Desbarbado y la herramienta como Husillo. Seleccione Actualizar➔ Simular.
Si desea reordenar o cambiar el sentido de una sección del recorrido, siga estos pasos:
1.Los proyectos CAM suelen venir ya con sus movimientos de aproximación y repliegue, por lo que podemos eliminar los nuestros: Simplemente vaya a "Aproximación" y "Retraer" y seleccione Eliminar. Seleccione Actualizar y después Simular.
2.En este ejemplo, los parámetros por defecto producen un resultado válido. El único parámetro adicional que podemos querer cambiar es el de activar y desactivar el husillo: Abrir Programa Eventos➔ Añada una subrutina en "Aproximación de la trayectoria" y "Retracción de la trayectoria" marcando cada opción y escriba "Husillo (1)" en Aproximación de la trayectoria y "Husillo (0)" en Retracción de la trayectoria. Esto supone que tiene una función definida en el controlador que puede aceptar un parámetro para activar o desactivar el husillo.
3.Seleccione Actualizar.
Ahora debemos modificar el nombre del programa que hemos creado "Estación 1" y lanzar el "Programa Principal"
Lo último que tenemos que hacer es generar el programa del robot. Como estamos utilizando un robot ABB, tendremos que exportar un archivo mod para el controlador del robot ABB que utilice el lenguaje de programación RAPID, propiedad de ABB.
1.Asegúrese de que utilizamos el postprocesador correcto: Seleccione la estación➔ Seleccione el postprocesador➔ ABB RAPID IRC 5.
2.Haga clic con el botón derecho del ratón en el programa Estación1 y seleccione Generar programa de robot.
Debería ver automáticamente el programa del robot en un editor de texto. Podrá ver todos los comandos de movimiento específicos y la sintaxis requerida por el controlador del robot ABB.