Deburring
Introducción
El desbarbado robótico de plásticos consiste en que un brazo robótico elimine el material sobrante de las piezas moldeadas de plástico. Este ejemplo le ayudará a crear un proyecto en RoboDK para la simulación del robot y la programación fuera de línea. Este ejemplo también muestra cómo puede utilizar el plugin Fusion 360 para generar trayectorias de herramientas en RoboDK.
Con el plugin RoboDK para Fusion 360, puede crear fácilmente un proyecto de mecanizado y exportar automáticamente la trayectoria generada dentro de RoboDK. RoboDK lo transformará entonces en un programa de robot. puede cargar fácilmente en RoboDK modelos 3D creados en SolidWorks. El Addin RoboDK le permite programar cualquier brazo robótico directamente desde Fusion 360 para cualquier aplicación de fabricación.
Ejemplo de desbarbado de plásticos
Para iniciar el proyecto, primero tendrá que seleccionar el ejemplo de desbarbado de plástico de RoboDK de la biblioteca por defecto.
Configuración
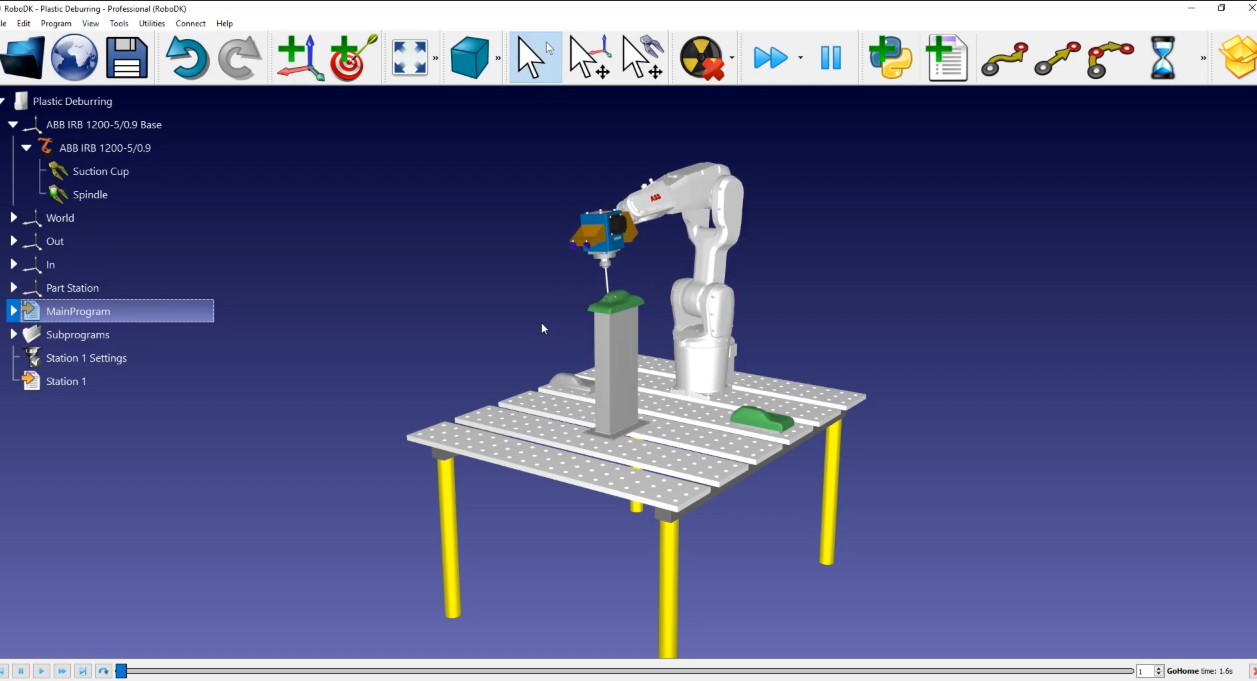
Este ejemplo utiliza una configuración sencilla: Un robot montado en una mesa (este ejemplo incluye un robot ABB), una pila para la pieza recién moldeada, una pila para la procesada y la plantilla en el centro para sujetar la pieza en su sitio
Cargue la estación:
1.Seleccione Archivo ➔
2.Localice el ejemplo Desbarbado plástico en la sección de ejemplos de RoboDK:
C:/RoboDK/Ejemplos/Plugin-Fusion360-Plastic-Deburring.rdk.
Ahora que ha cargado la estación puede abrir Fusion 360.
Boceto 2D de Fusion 360
Abra su objeto en Fusion 360. En este ejemplo el objeto es una pieza de plástico. El objetivo de este proyecto es eliminar el exceso de material en los tres orificios, y alrededor de la pieza cerca de la parte inferior de la misma.
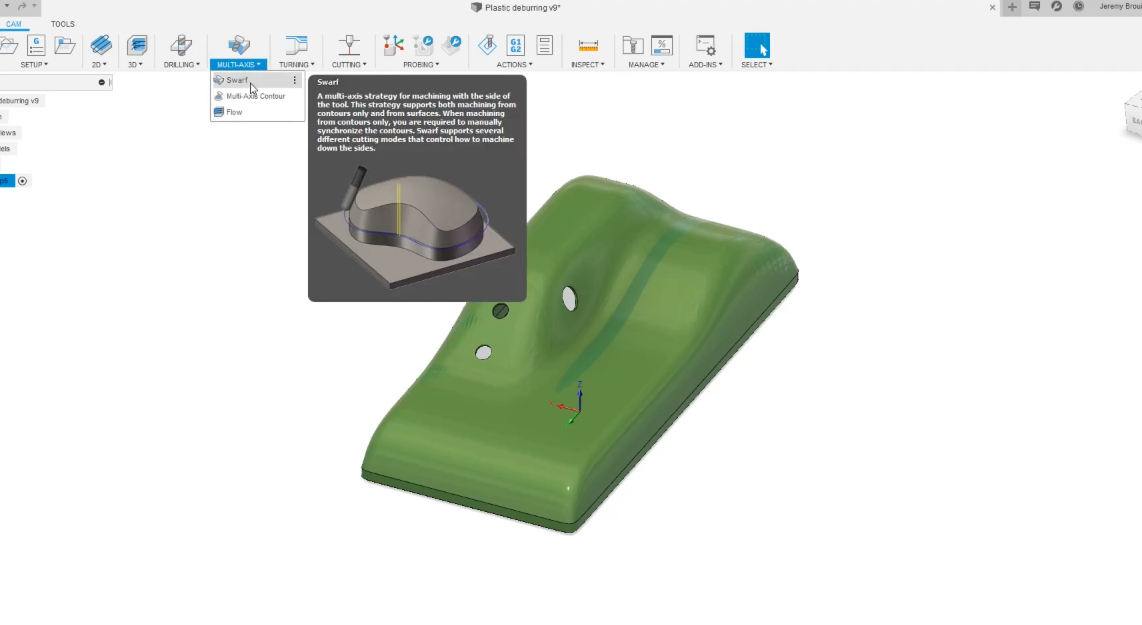
En primer lugar, debe asegurarse de que se encuentra en la pestaña del espacio de trabajo "Fabricación" de Fusion. Debemos seguir estos pasos para crear la trayectoria de la herramienta:
1.Seleccione Multieje y, a continuación, seleccione la herramienta Viruta.
2.Seleccione la herramienta que desea utilizar (en este ejemplo utilizaremos una herramienta personalizada de nuestra estación RoboDK) y, a continuación, seleccione el orificio para crear la primera trayectoria.
3.Para obtener la trayectoria de la herramienta en el lado derecho de la superficie, seleccionaremos Mecanizar otro lado y después Ok. Siga este procedimiento para cada orificio.
4.Para hacer lo mismo con la parte inferior, seleccionará la herramienta Viruta y después seleccionará la parte inferior.
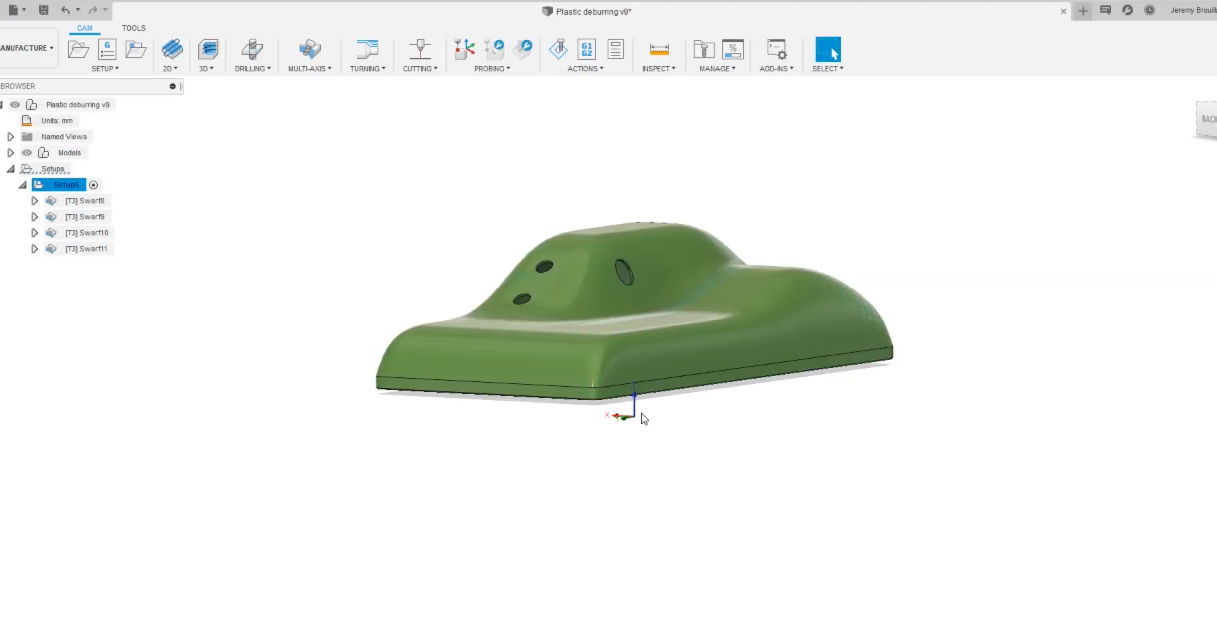
5.Una vez realizado el cálculo, vamos a simular las trayectorias que acabamos de crear: Seleccione su configuración y, a continuación, seleccione Simular.
Tendrá una trayectoria de herramienta completa para su robot. Tendremos que volver a RoboDK para asegurarnos de que el sistema de coordenadas "Desbarbado" está activado. Para ello debemos:
Entre en RoboDK: seleccione Desbarbar y, a continuación, Activar sistema de coordenadas.
Ahora que el sistema de coordenadas de desbarbado está activado, el programa se exportará con respecto a ese sistema de coordenadas. e volverá a Fusion 360 y comprobará que la imagen es como se muestra:
Siga estos pasos para cargar su boceto en RoboDK:
1.En Fusion 360, dispone del plugin RoboDK. Simplemente seleccione Cargar proyecto CAM en RoboDK
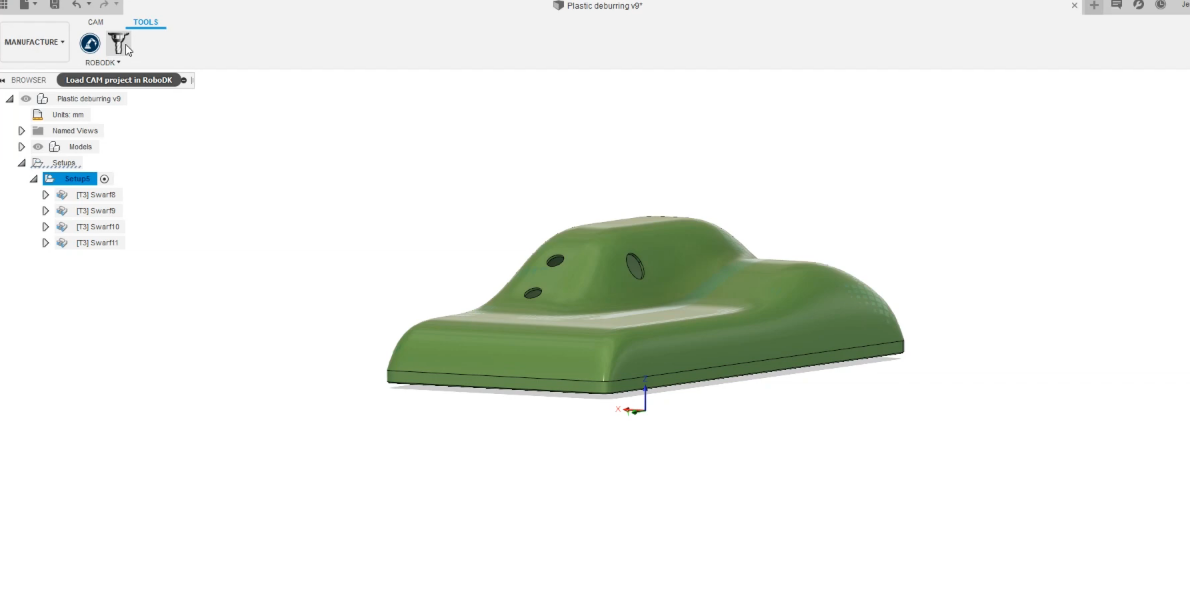
2.Si volvemos a RoboDK, podemos encontrar la trayectoria de corte en su lugar. Se ha creado un "Proyecto de mecanizado" llamado "Desbarbado de plástico": Seleccione Desbarbado y después Visible.
3.Podemos renombrar la trayectoria de la herramienta de corte a "Ajustes Estación1": Haga clic con el botón derecho en Desbarbado plástico para cambiarle el nombre.
Estación RoboDK
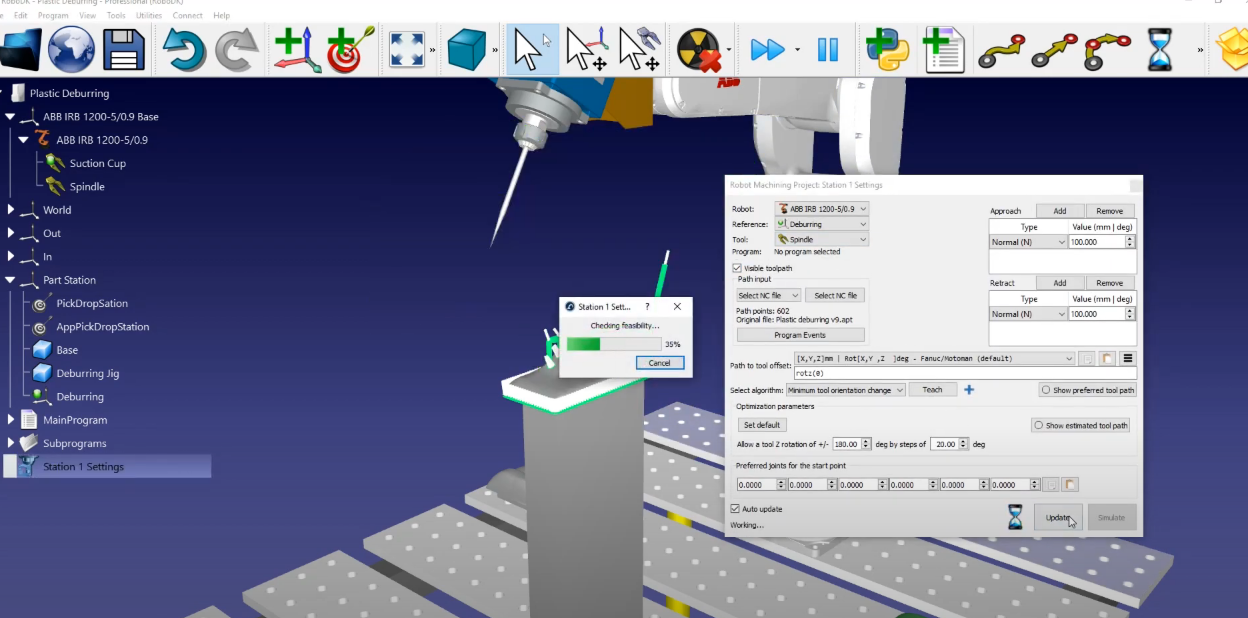
Una vez que tenemos lista la trayectoria de la herramienta del robot en RoboDK debemos asegurarnos de que la célula virtual del robot coincide con la configuración real. En RoboDK nos aseguramos de que estamos utilizando la herramienta y el sistema de coordenadas correctos para la operación de fabricación antes de generar el programa del robot.
En este ejemplo seleccionamos la referencia Desbarbado y la herramienta como Husillo. Seleccione Actualizar➔ Simular.
Si desea reordenar o cambiar el sentido de una sección del recorrido, siga estos pasos:
1.Los proyectos CAM suelen venir ya con sus movimientos de aproximación y repliegue, por lo que podemos eliminar los nuestros: Simplemente vaya a "Aproximación" y "Retraer" y seleccione Eliminar. Seleccione Actualizar y después Simular.
2.En este ejemplo, los parámetros por defecto producen un resultado válido. El único parámetro adicional que podemos querer cambiar es el de activar y desactivar el husillo: Abrir Programa Eventos➔ Añada una subrutina en "Aproximación de la trayectoria" y "Retracción de la trayectoria" marcando cada opción y escriba "Husillo (1)" en Aproximación de la trayectoria y "Husillo (0)" en Retracción de la trayectoria. Esto supone que tiene una función definida en el controlador que puede aceptar un parámetro para activar o desactivar el husillo.
3.Seleccione Actualizar.
Ahora debemos modificar el nombre del programa que hemos creado "Estación 1" y lanzar el "Programa Principal"
Lo último que tenemos que hacer es generar el programa del robot. Como estamos utilizando un robot ABB, tendremos que exportar un archivo mod para el controlador del robot ABB que utilice el lenguaje de programación RAPID, propiedad de ABB.
1.Asegúrese de que utilizamos el postprocesador correcto: Seleccione la estación➔ Seleccione el postprocesador➔ ABB RAPID IRC 5.
2.Haga clic con el botón derecho del ratón en el programa Estación1 y seleccione Generar programa de robot.
Debería ver automáticamente el programa del robot en un editor de texto. Podrá ver todos los comandos de movimiento específicos y la sintaxis requerida por el controlador del robot ABB.