Estación RoboDK
El siguiente paso es verificar si el orden en el que se ejecutarán las secciones de la ruta es correcto seleccionando
Puede ver las pequeñas líneas blancas que salen de la trayectoria de la canoa. Esas son las normales de la superficie. En este ejemplo todas parecen haberse importado correctamente.
Siga estos pasos para establecer la dirección de la trayectoria:
1.Seleccione
2.Haga clic en Seleccionar curva.
Ahora puede ver el orden y la dirección en que se ejecutan los segmentos de la trayectoria. Si desea cambiar la dirección, haga clic con el botón derecho y seleccione Cambiar sentido.
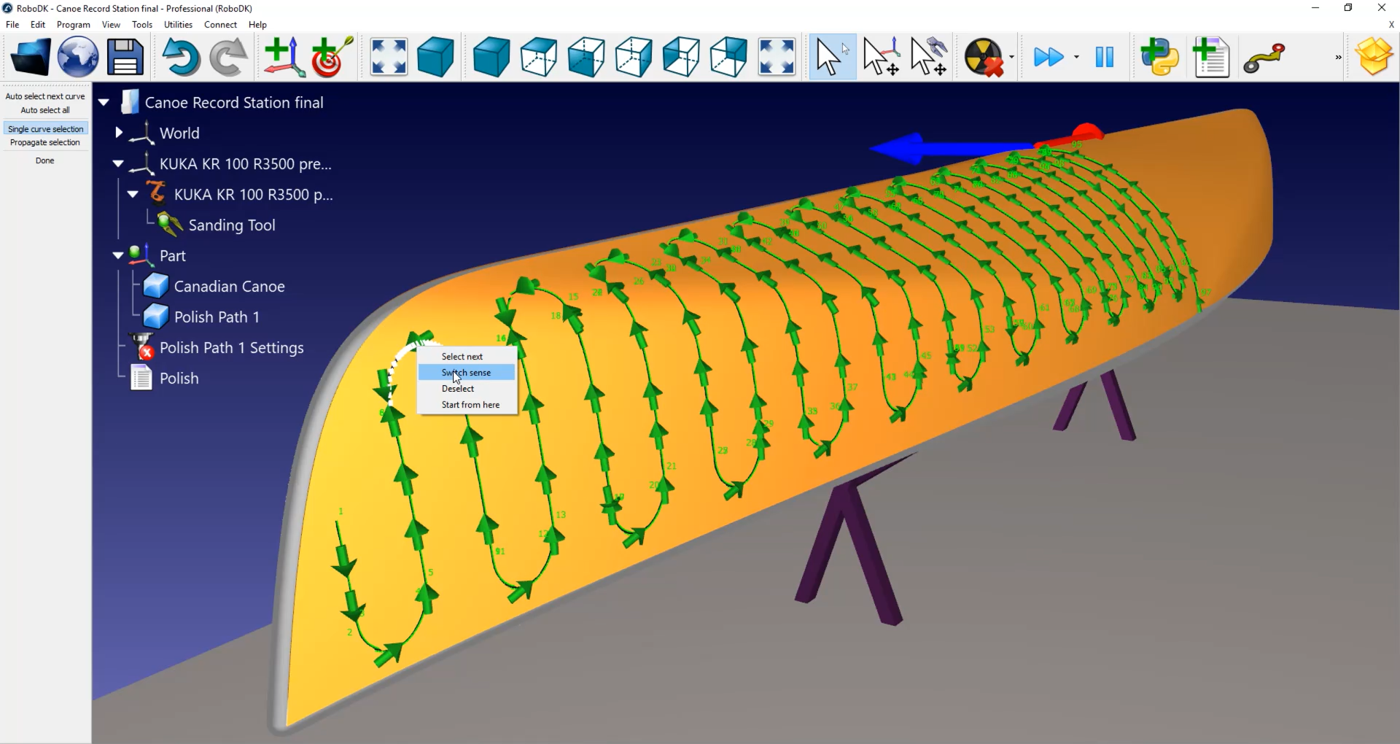
En este caso, es necesario rehacer el camino:
1.Haga clic con el botón derecho del ratón en un espacio vacío de la estación (es decir, el fondo azul).
2.Seleccione Restablecer selección.
3.Seleccione la línea con la que desea empezar. Asegúrese de que apunta en la dirección correcta.
4.Seleccione la herramienta Seleccionar todo automáticamente en la esquina superior izquierda de su pantalla.
5.Seleccione Hecho.
Ahora puede simular su estación haciendo doble clic en
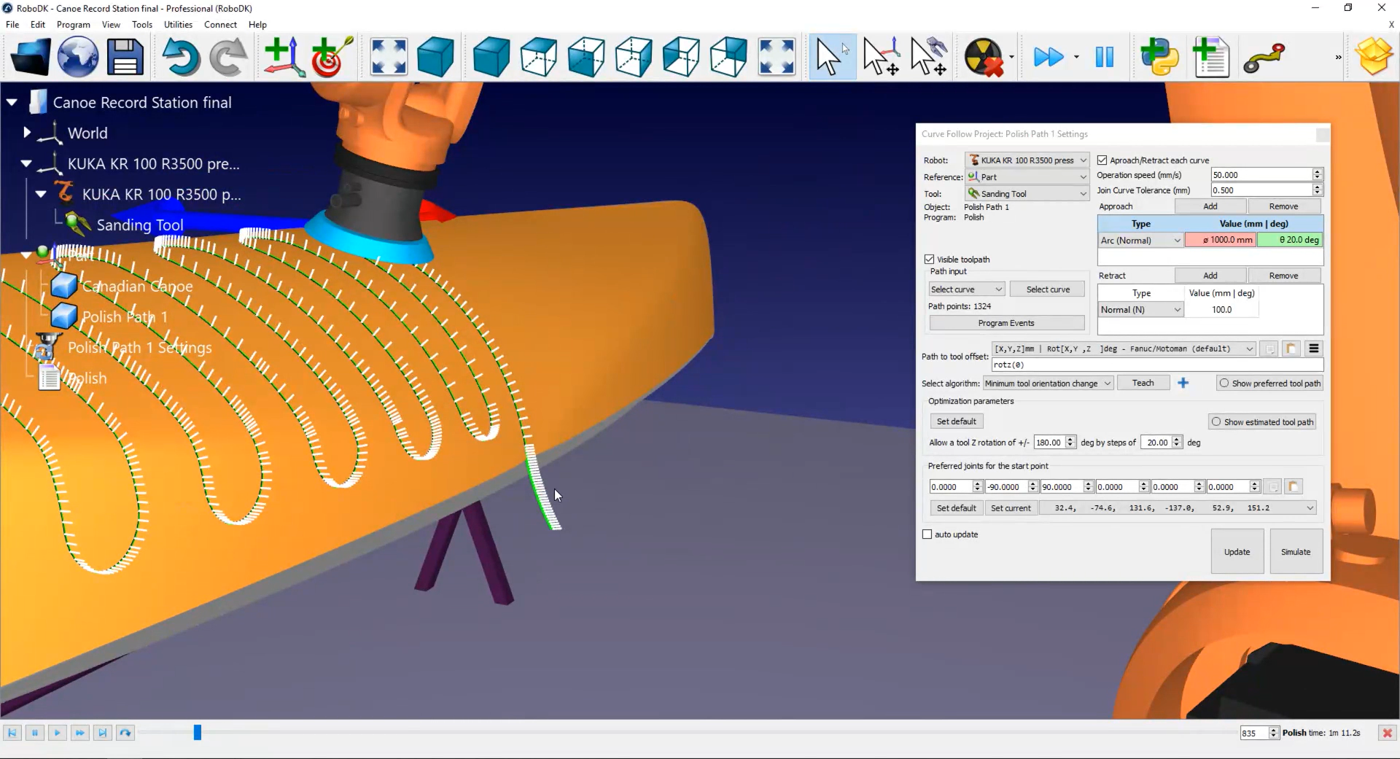
También puede añadir movimientos normales de 200 milímetros para ayudar a evitar la colisión entre el robot y la canoa haciendo doble clic en
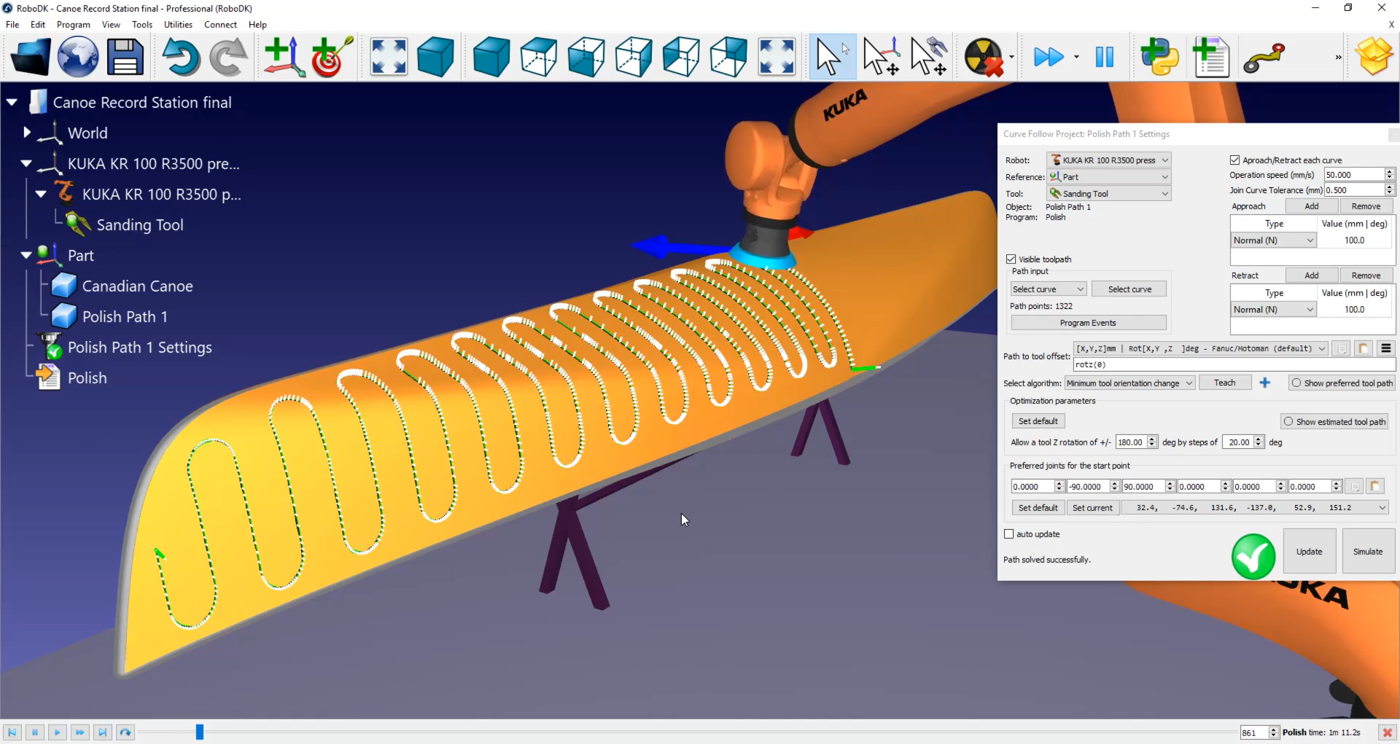
Puede modificar la velocidad de aproximación y repliegue seleccionando
En este menú también puede activar la opción Establecer redondeo. Por defecto, cada línea blanca a lo largo de su trayectoria es un punto que se enviará al controlador de su robot como puntos en los que el robot debe detenerse. En una aplicación de pulido o lijado, éste no es el mejor comportamiento.
Active la casilla Establecer redondeo para activar la opción de movimiento continuo en su controlador. Dependiendo de la marca del robot, el nombre de esa opción puede ser "redondeo", "movimiento constante" o "datos de zona". En este ejemplo el valor será 0,5mm.
En este ejemplo, como estamos utilizando un robot KUKA obtendrá un archivo SRC cuando genere el programa del robot. Este archivo que puede ser leído por un controlador KUKA KRC.
Siga estos pasos para generar un programa de robot:
1.Haga clic con el botón derecho del ratón en
2.Seleccione OK.
3.Haga clic con el botón derecho del ratón en