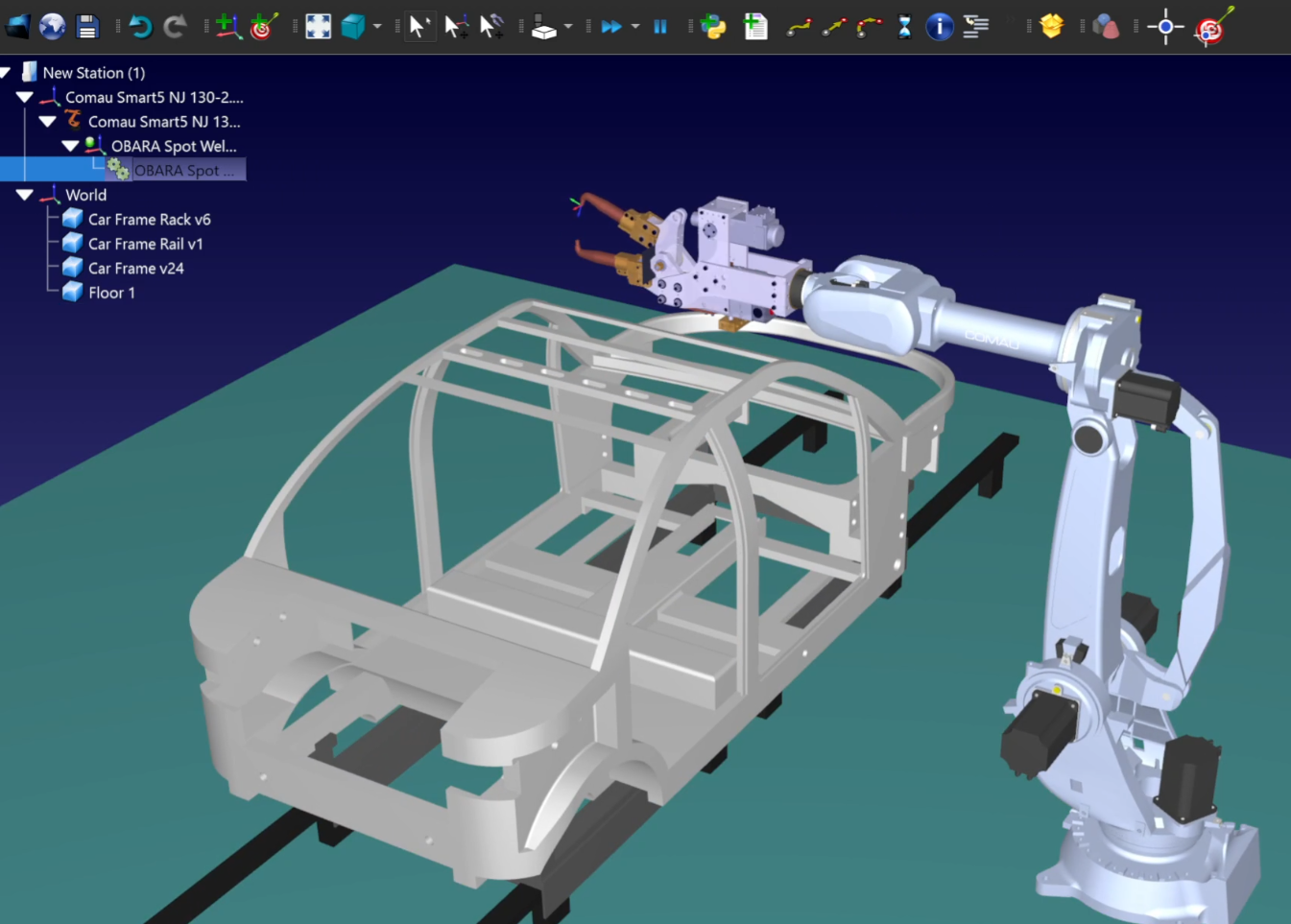
Componentes de la estación
Primero debe cargar un robot y una pistola de soldadura por puntos como herramienta del robot.
Puede utilizar los siguientes componentes de la biblioteca en línea de RoboDK:
1.Robot: Comau Smart5 NJ 130-2.6
2.Herramienta: Pistola de soldadura por puntos OBARA
El pedestal y la fijación se cargarán utilizando archivos locales y, para crear el suelo, utilizaremos el Addin Shape. Puede consultar nuestra Guía de introducción y la documentación del Addin Shape para más detalles.