Soldadura por puntos
La soldadura por puntos es una de las tareas más comunes que requieren el uso de software de simulación de robots. Esta guía le muestra cómo puede simular y programar un robot para la soldadura por puntos automatizada de paneles de carrocería de automóviles.
Encontrará la muestra disponible en nuestra biblioteca de ejemplos: Enlace estación de soldadura por puntos.
Requisitos
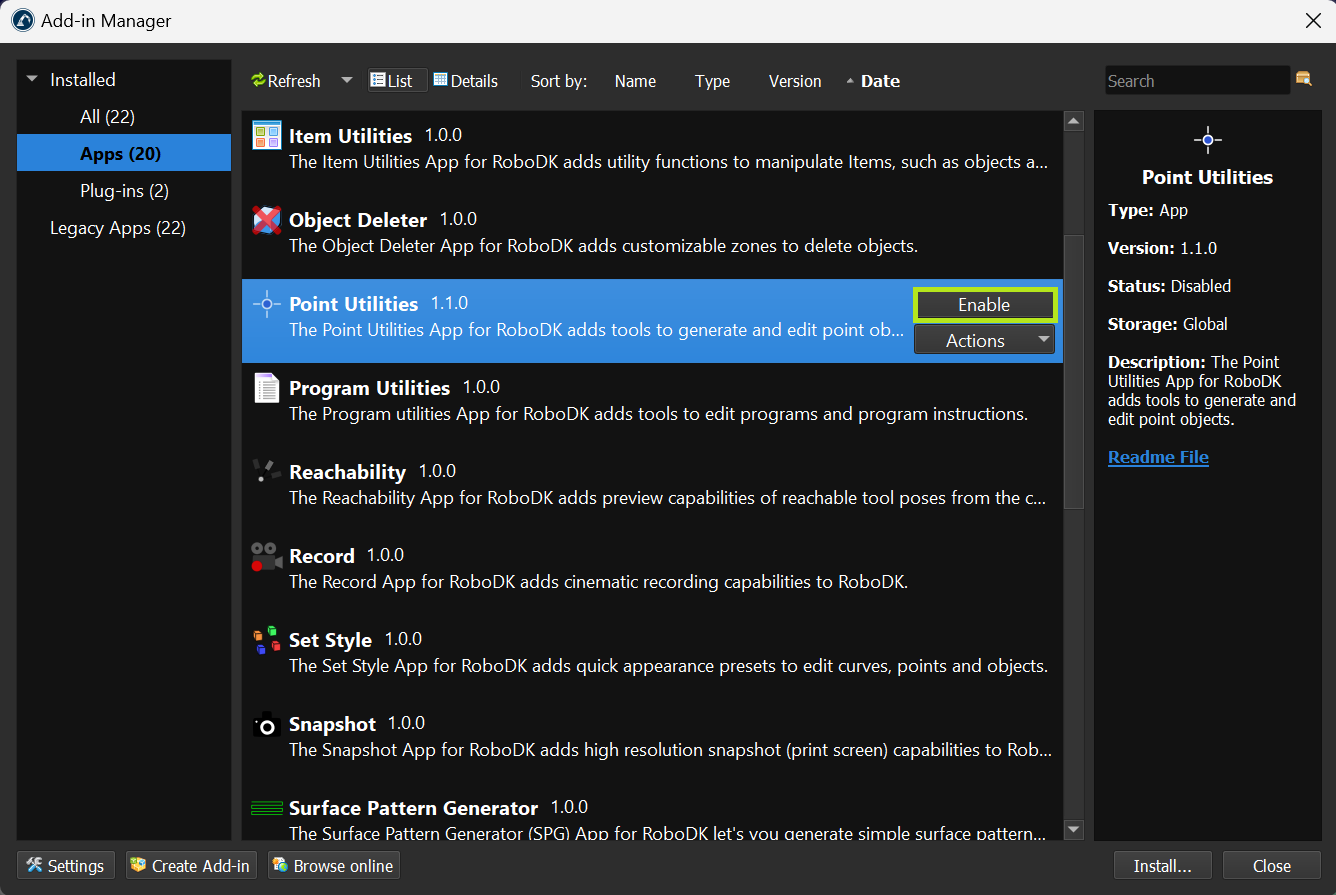
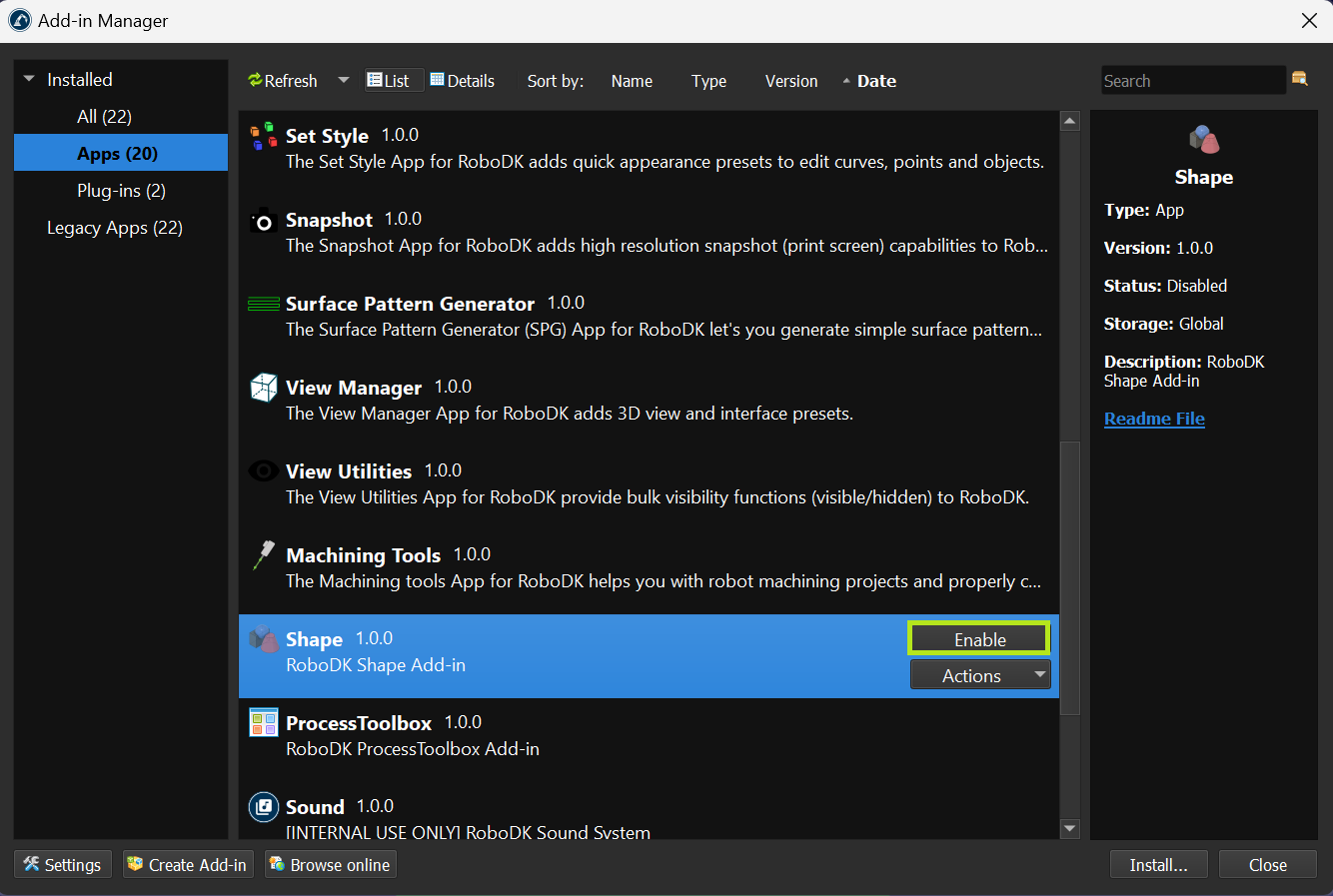
Debe utilizar RoboDK v5.5.4 o posterior para crear correctamente el ejemplo de soldadura por puntos. Esta versión de RoboDK incluye las utilidades Point Utilities y Shape Addin que facilitan la creación del proyecto de soldadura por puntos.
Flujo de trabajo
Esta sección le guiará para crear una simulación de soldadura por puntos incluyendo la generación automática de una trayectoria libre de colisiones utilizando el plugin Collision Free Planner.
Esta sección desglosa el proceso de creación del proyecto de soldadura por puntos en los siguientes pasos:
1.Cargue todos los modelos, robots y herramientas necesarios.
2.Configure la herramienta (TCP).
3.Cree objetivos.
4.Cree y compruebe las trayectorias/trayectorias de los robots.
5.Analice el camino.
6.Organice la secuencia del programa.
7.Genere programas de robot.
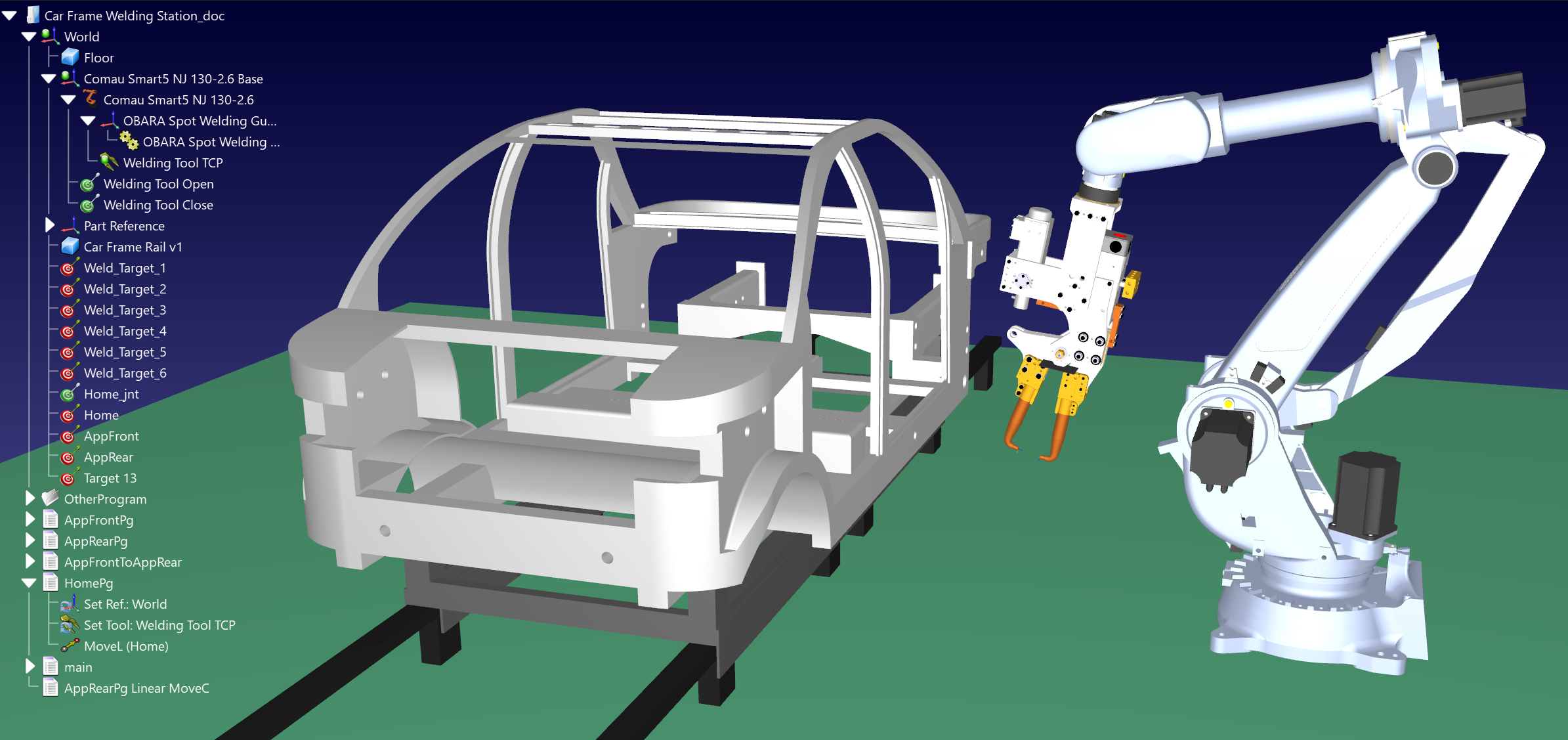
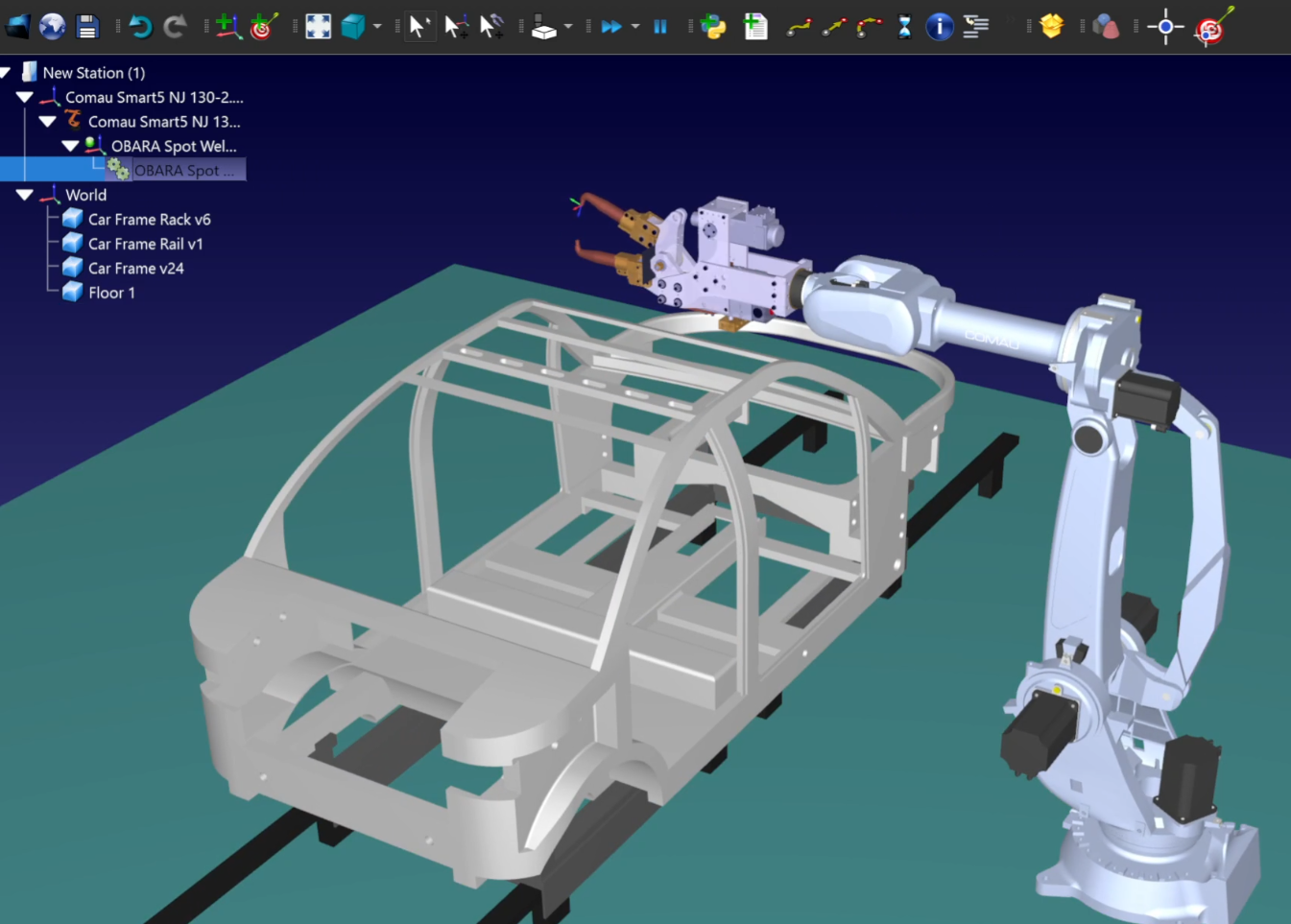
Componentes de la estación
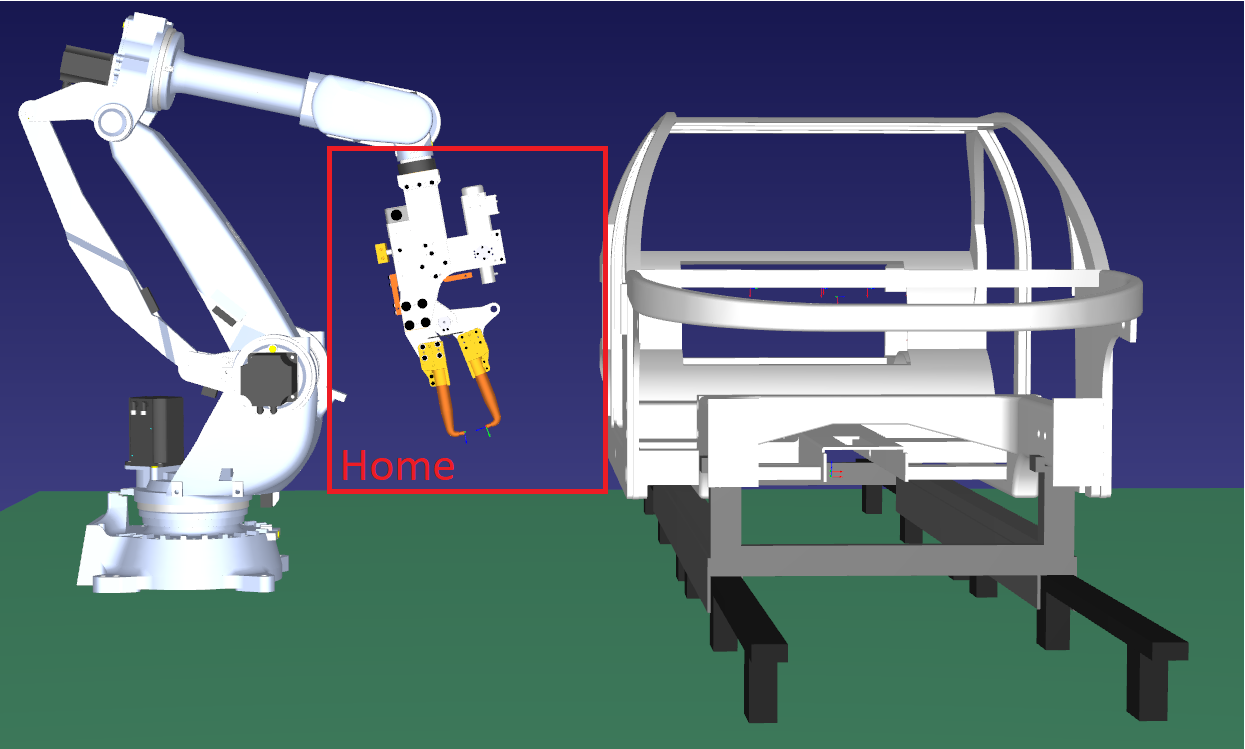
Primero debe cargar un robot y una pistola de soldadura por puntos como herramienta del robot.
Puede utilizar los siguientes componentes de la biblioteca en línea de RoboDK:
1.Robot: Comau Smart5 NJ 130-2.6
2.Herramienta: Pistola de soldadura por puntos OBARA
El pedestal y la fijación se cargarán utilizando archivos locales y, para crear el suelo, utilizaremos el Addin Shape. Puede consultar nuestra Guía de introducción y la documentación del Addin Shape para más detalles.
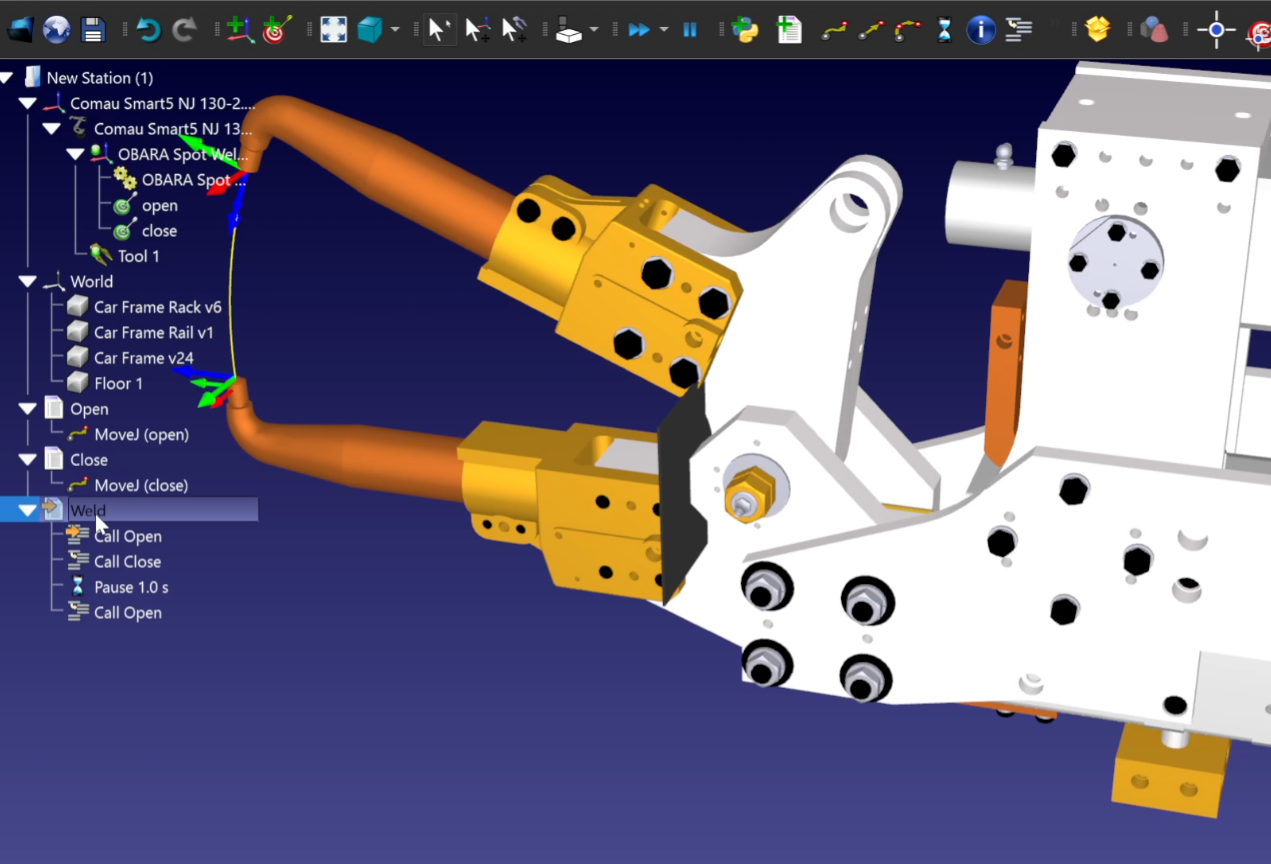
Pistola de soldadura por puntos
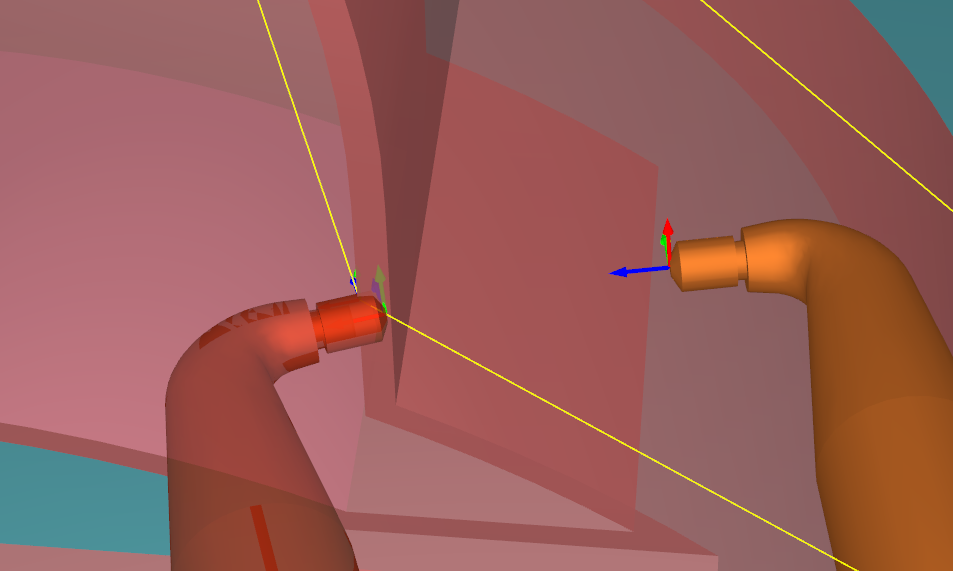
Esta sección muestra cómo puede animar el movimiento de la pistola de soldadura por puntos y crear el punto central de la herramienta (TCP).
Para añadir una pistola de soldadura por puntos con una pieza de sujeción móvil, debe definirse el TCP correspondiente y el mecanismo debe fijarse por separado. Puede medir la posición del punto TCP en relación con la brida seleccionando Herramientas-Medir.
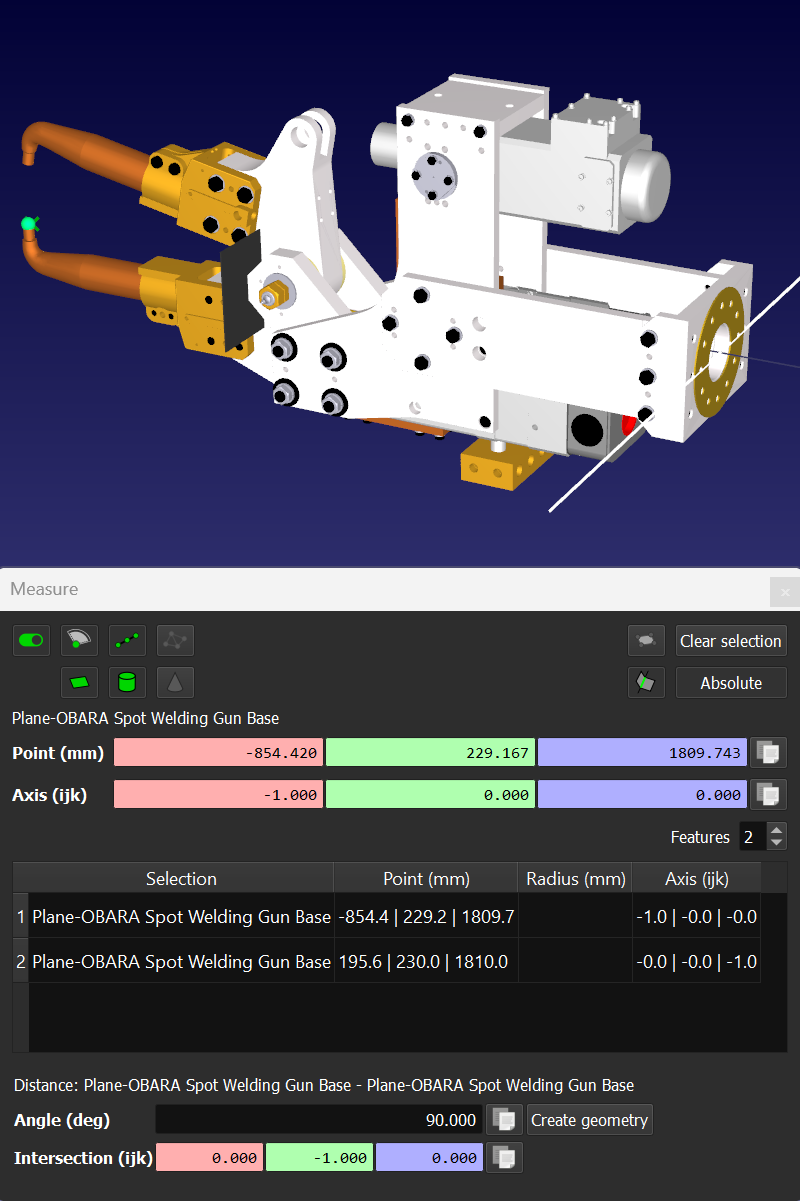
Puede crear dos objetivos para abrir y cerrar la pistola de soldadura por puntos. Estos objetivos pueden utilizarse en programas para simular el proceso de soldadura por puntos:
Puntos de soldadura por puntos
En esta sección se muestra cómo crear los puntos de soldadura por puntos en el bastidor de la cabina a los que mover la pistola de soldadura por puntos.
Supongamos que necesita soldar por puntos la parte delantera y trasera del bastidor del coche. Con el Addin Utilidades de Puntos, puede colocar puntos de soldadura por puntos directamente sobre las superficies. Tras convertir los puntos en objetivos (se trata de una función integrada del Addin Utilidades de Puntos), puede realinear la orientación de los objetivos con respecto a los ángulos TCP:
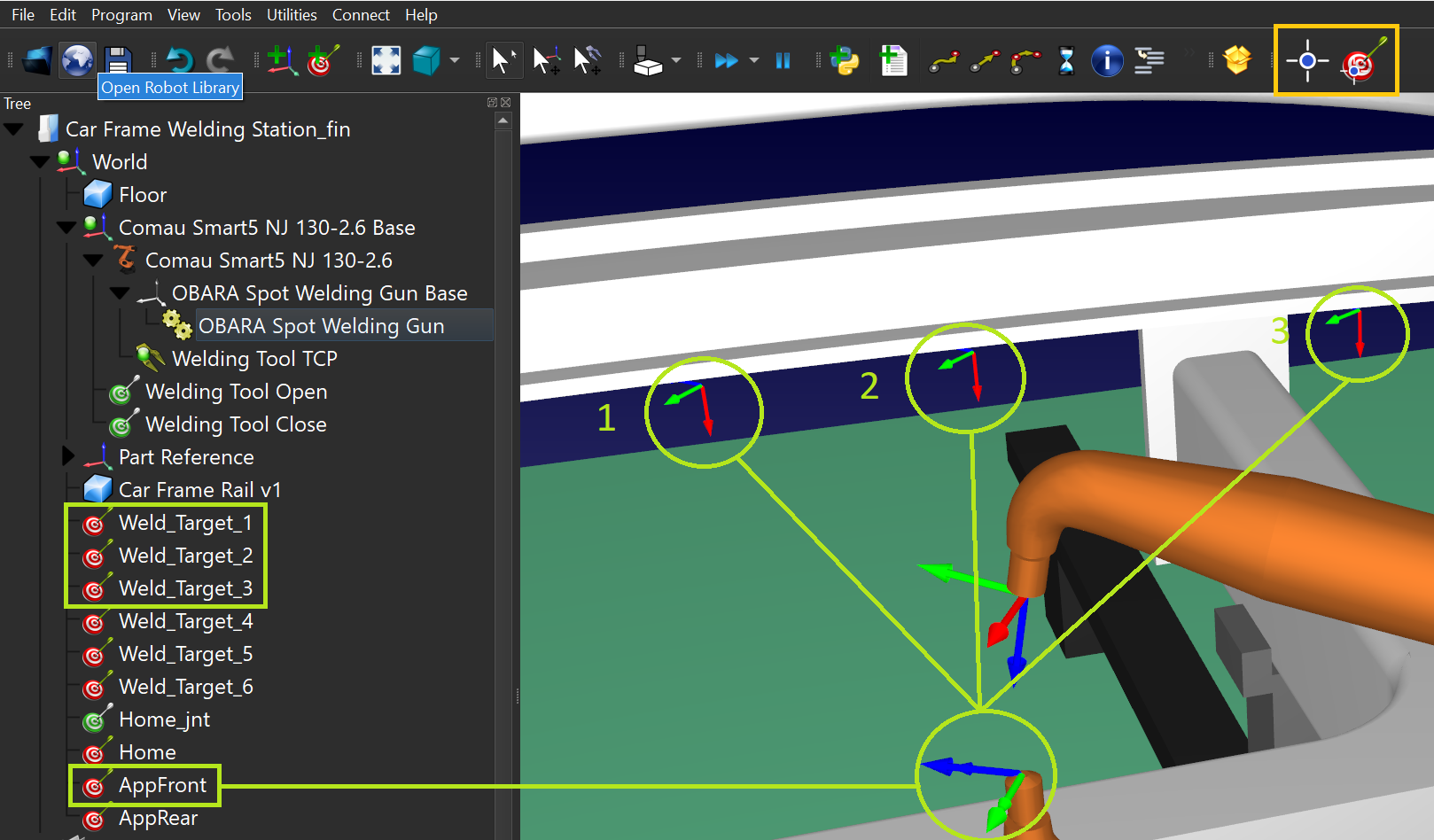
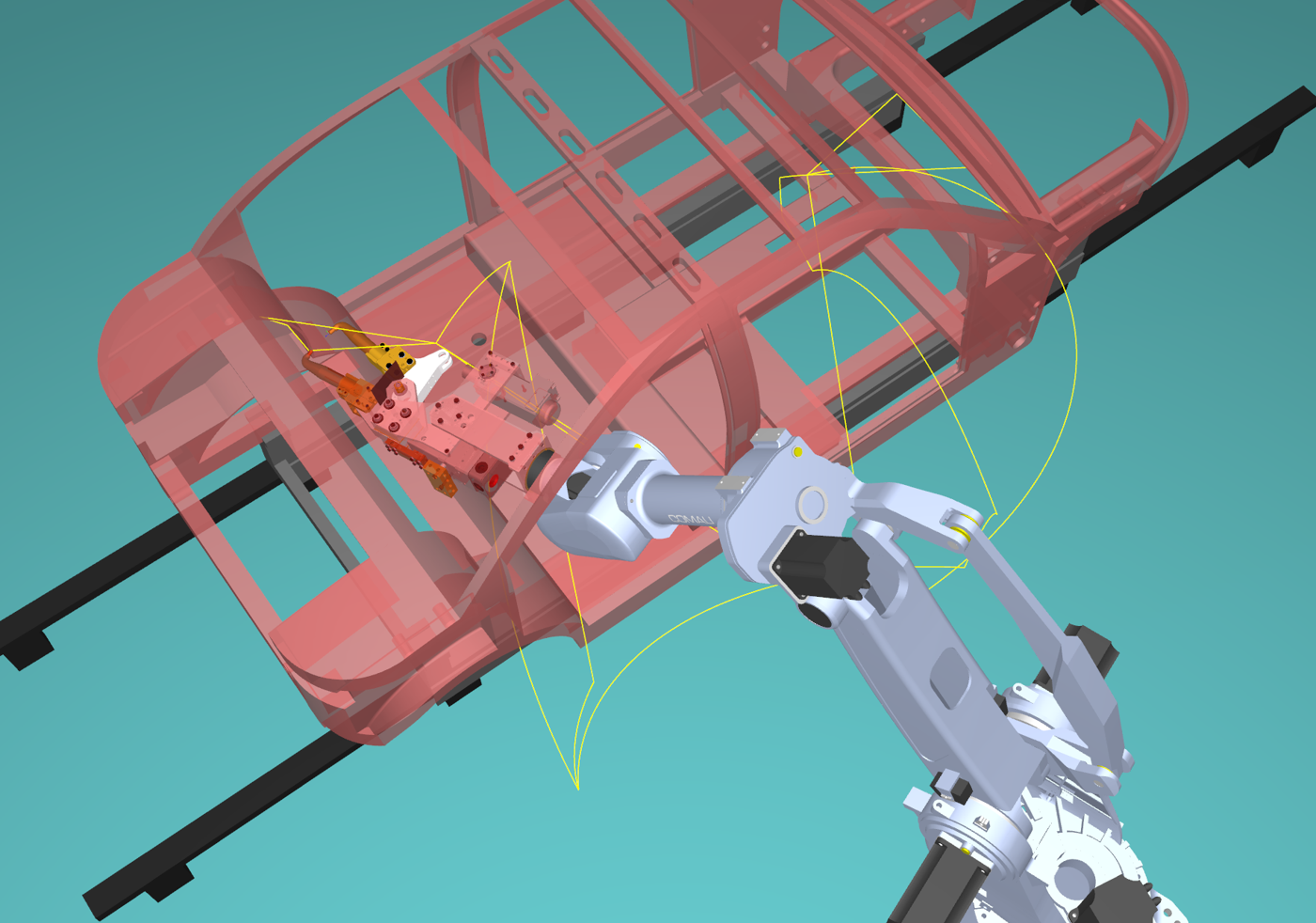
Planificación de la trayectoria
Esta sección muestra cómo puede crear una trayectoria sin colisiones entre 2 puntos dentro del chasis del coche.
El bastidor del vehículo tiene una viga de fuerza que impide el acceso fácil de la parte delantera a la trasera, por lo que necesita crear dos objetivos de aproximación que permitan pasar por el interior del bastidor.
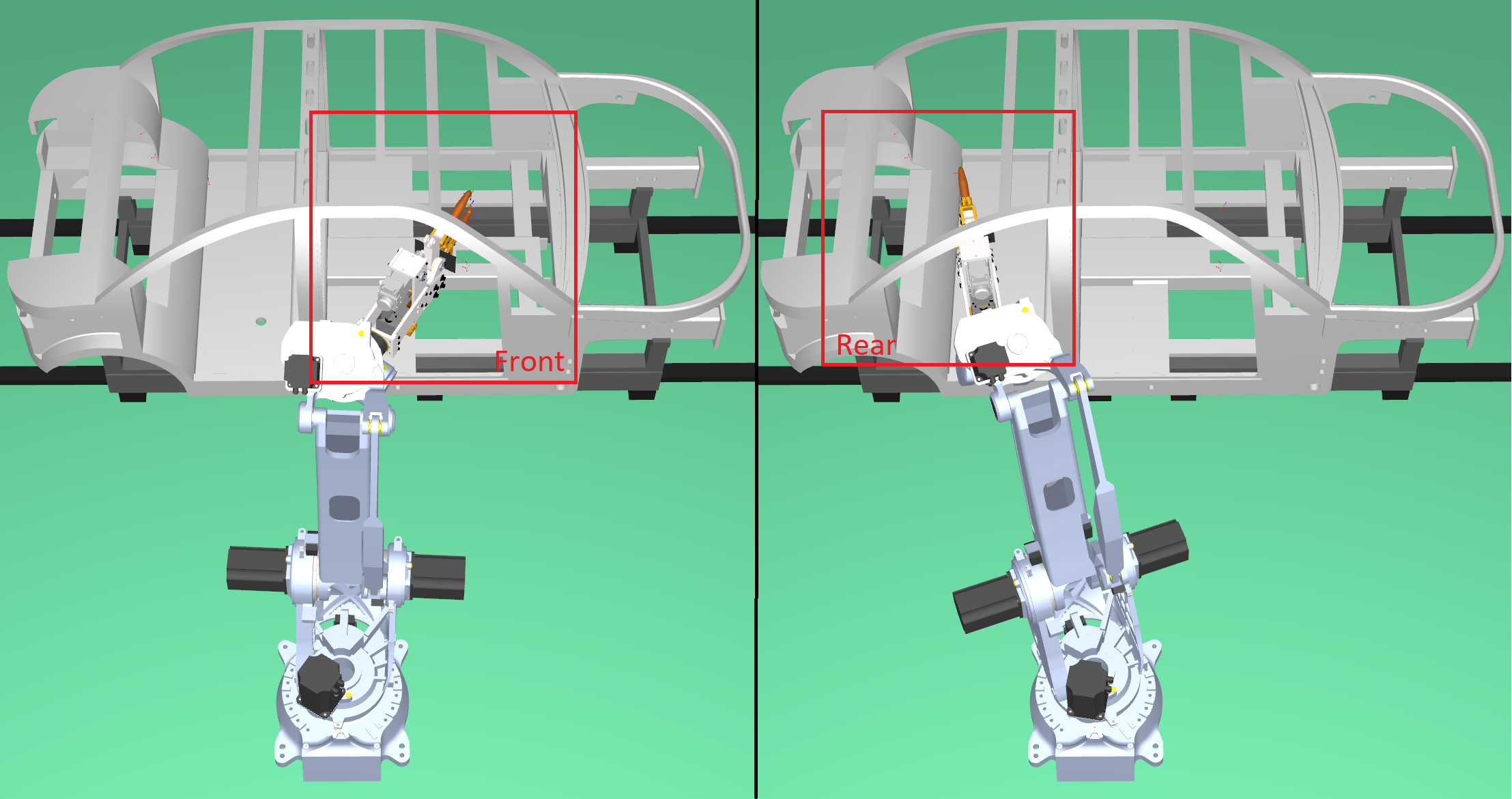
También necesitamos crear un objetivo intermedio entre los dos objetivos de aproximación. Podemos crear objetivos de aproximación basados en la posición de la herramienta para los objetivos de soldadura por puntos.
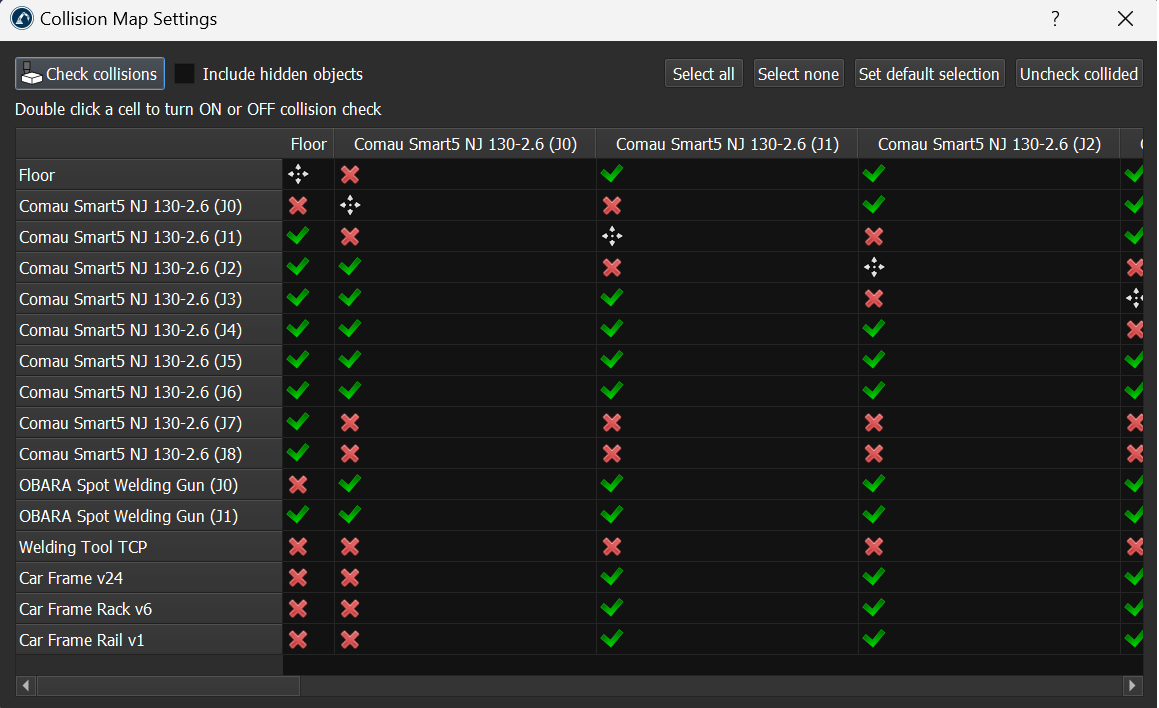
Detección de colisiones
Una vez que tenga una trayectoria puede volver a comprobar si hay colisiones y asegurarse de que ha definido correctamente su mapa de colisiones.
Puede comprobar si alguna pieza colisiona seleccionando HerramientasàComprobar colisiones. Esto activa/desactiva la detección de colisiones.
A continuación, puede configurar el mapa de colisión seleccionando Herramientas->Mapa de colisión.
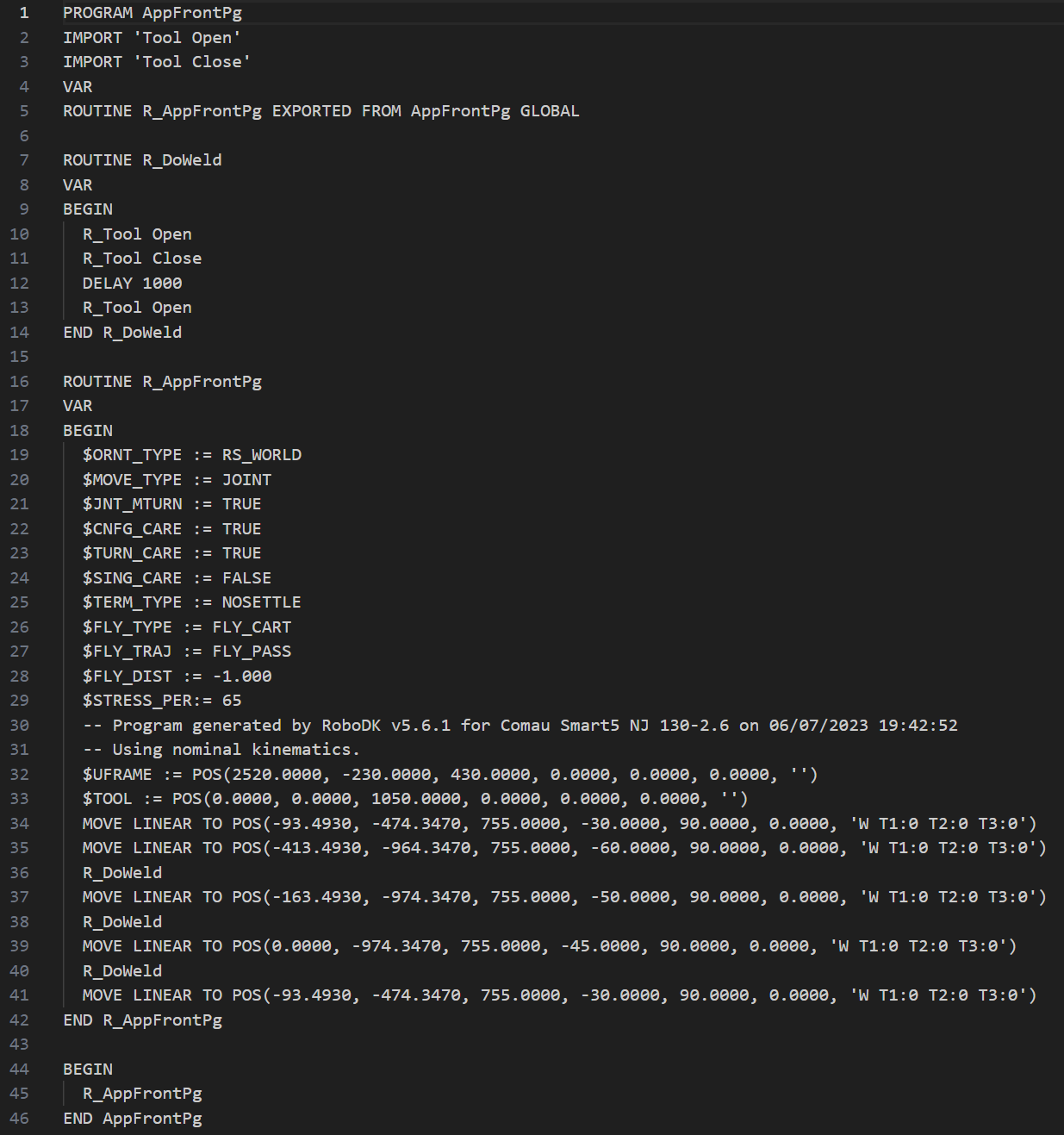
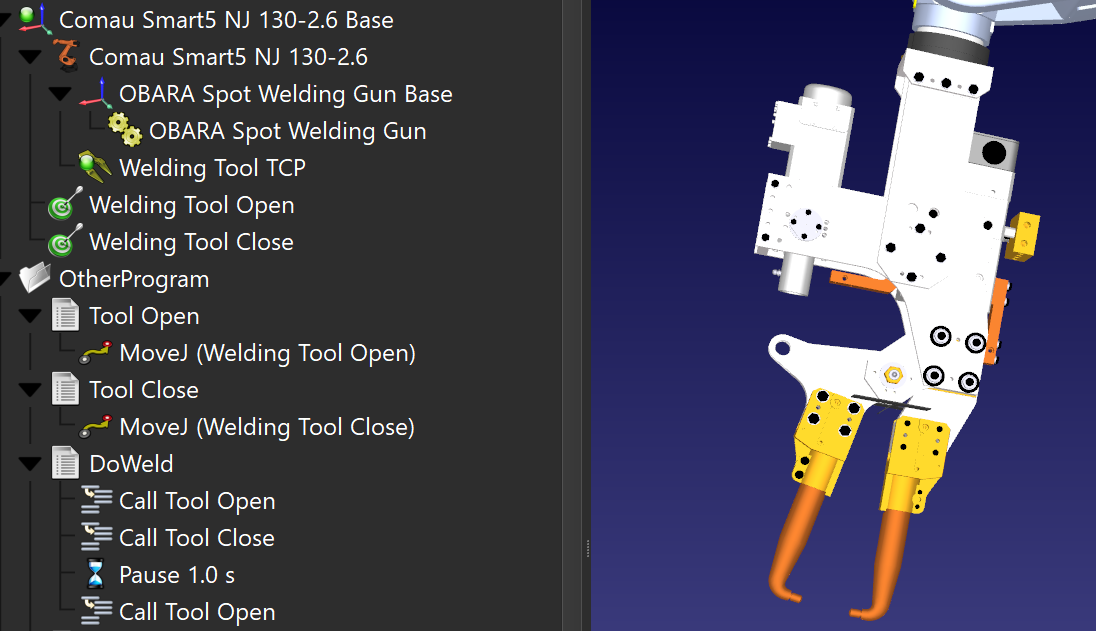
Secuencia del programa
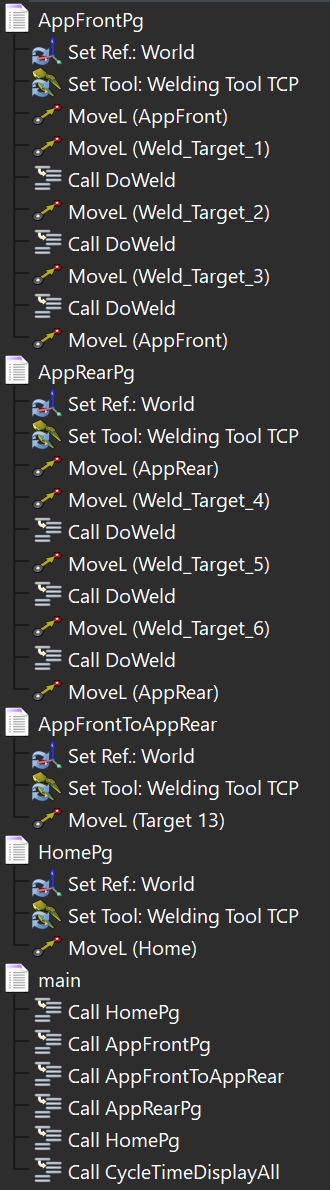
Esta sección le ayuda a crear la secuencia de soldadura por puntos dividida en un programa principal y subprogramas para mantener organizados la simulación y los programas generados.
Es una buena práctica dividir la simulación en varios programas para que resulte más cómodo realizar futuras modificaciones y/o colaborar en equipo. Para esta estación, utilizamos un programa principal con varias rutinas:
Estimación del tiempo de ciclo
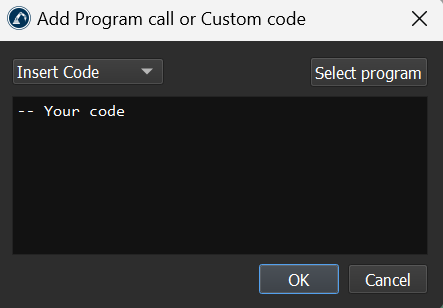
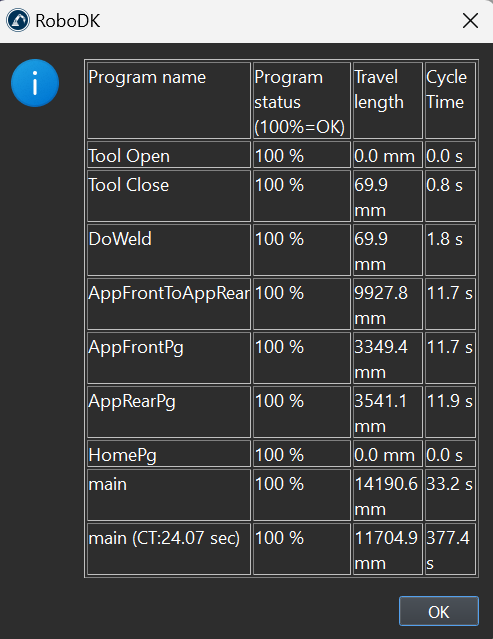
Esta sección muestra cómo puede calcular y visualizar la estimación del tiempo de ciclo de la simulación de soldadura por puntos.
Puede añadir fácilmente la estimación del tiempo a su programa con sólo cargar el script CycleTimeDisplayAll.py de la carpeta C:\RoboDK\Library\Scripts. A continuación, puede llamarlo desde el programa principal:
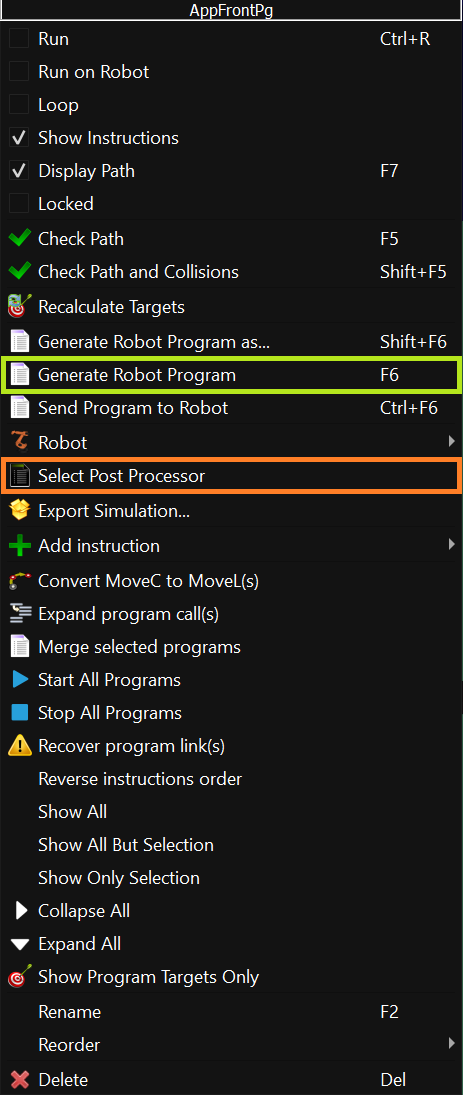
Generar programa robot
Una vez que tenga una secuencia de simulación válida para su aplicación de soldadura por puntos, podrá generar el programa con sólo unos clics.
Seleccione el programa que desea generar para su robot haciendo clic con el botón derecho del ratón sobre el programa y seleccionando Generar programa de robot.