Ejemplo de soldadura robotizada
Para realizar este proyecto de soldadura robotizada, primero debe seleccionar el ejemplo de soldadura robotizada con posicionador de RoboDK en la biblioteca por defecto. A continuación, deberá seleccionar las trayectorias de soldadura en Fusion 360. A continuación, deberá ajustar la trayectoria del robot en RoboDK.
Modelo de importación
Primero debe importar la pieza y las trayectorias de soldadura desde Fusion 360.
Importe el modelo desde Fusion 360:
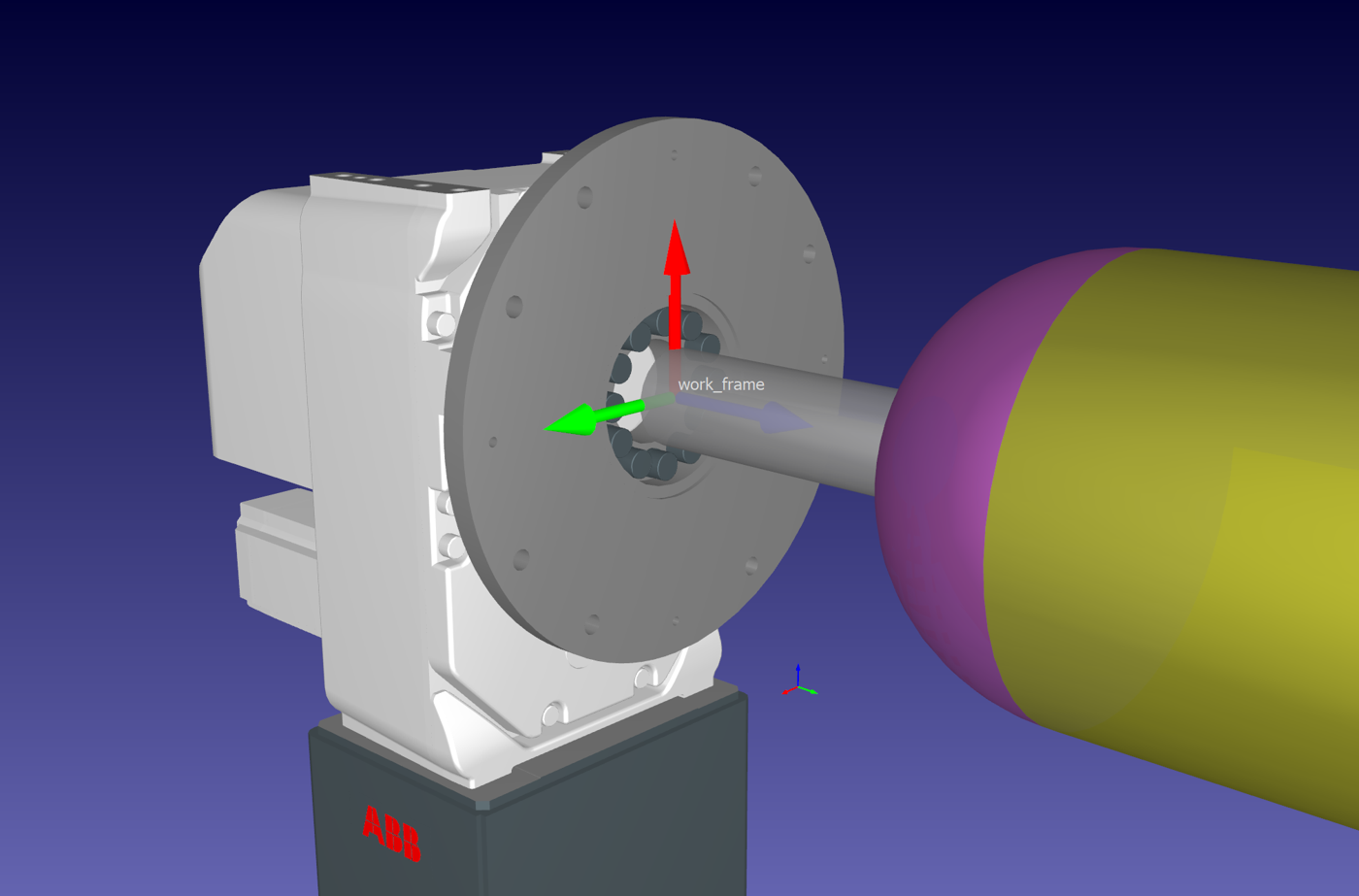
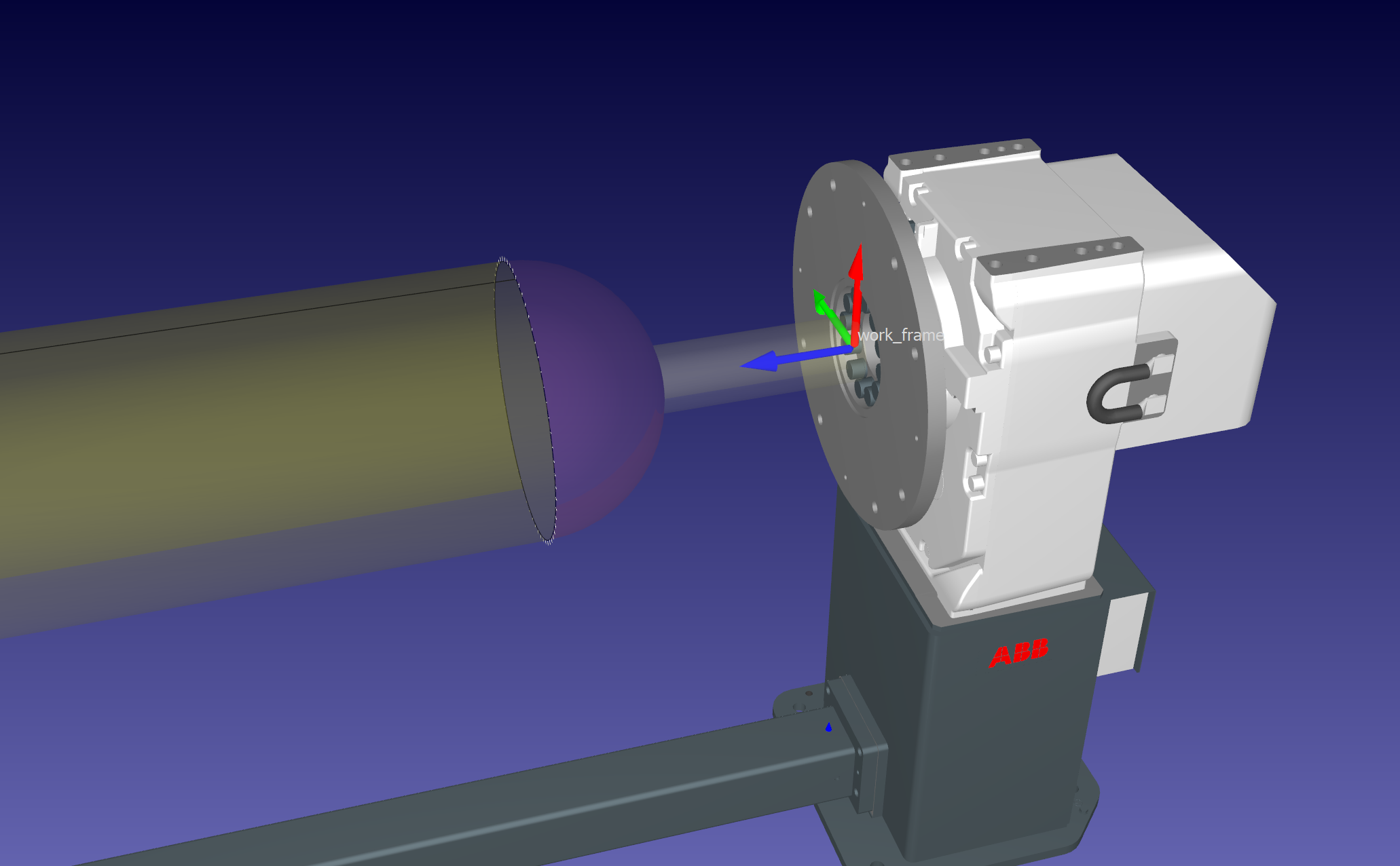
1.Seleccione el sistema de coordenadas de la brida del posicionador para la fijación del depósito en RoboDK.
2.Vaya a la pestaña RoboDK en las utilidades de Fusion 360 y seleccione Cargar modelo.
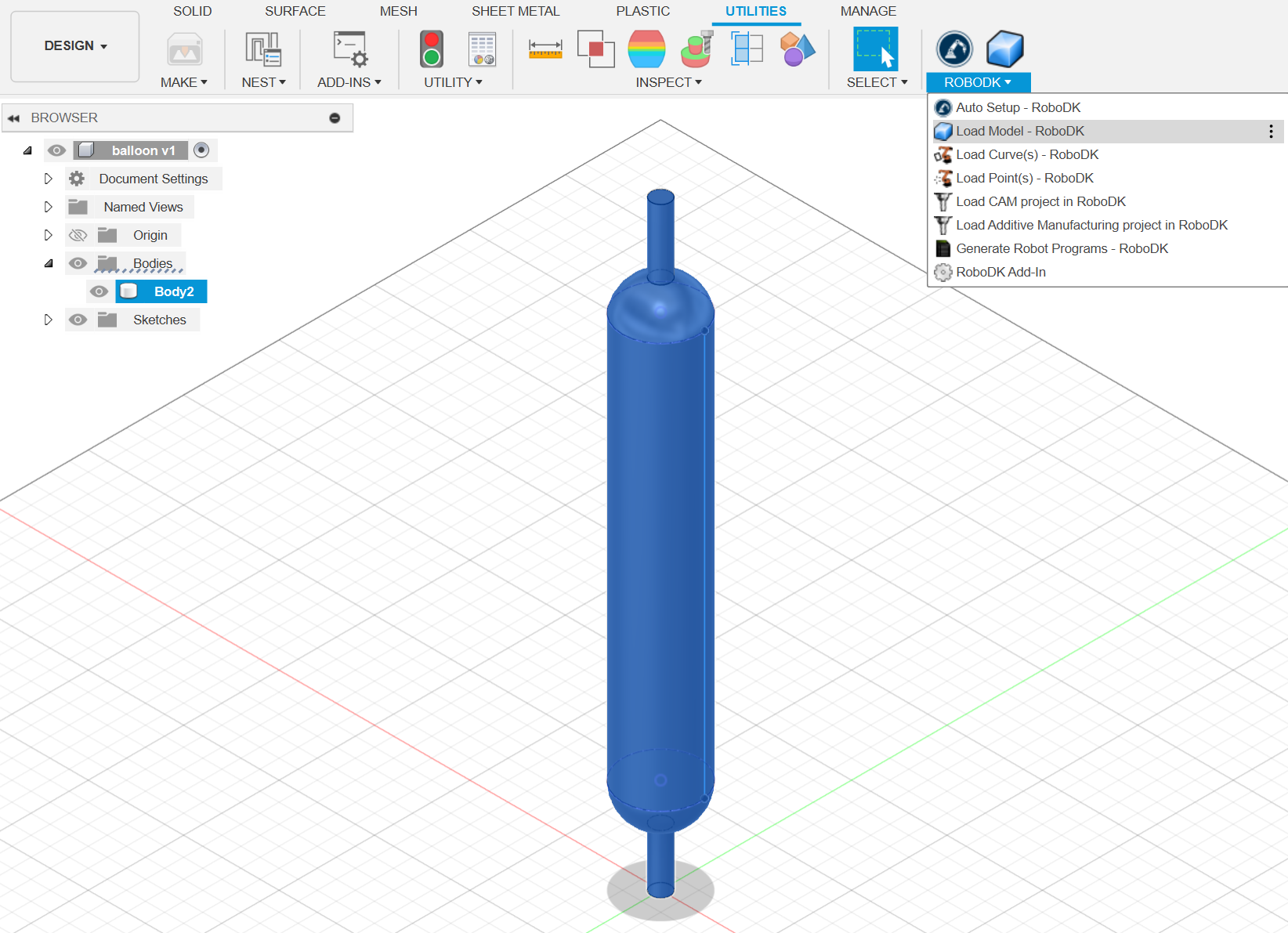
3.Compruebe la posición del modelo de tanque y cámbiele el nombre.
Ruta de importación
Después de importar el modelo, hay que importar las trayectorias de soldadura.
Importe la trayectoria desde Fusion 360:
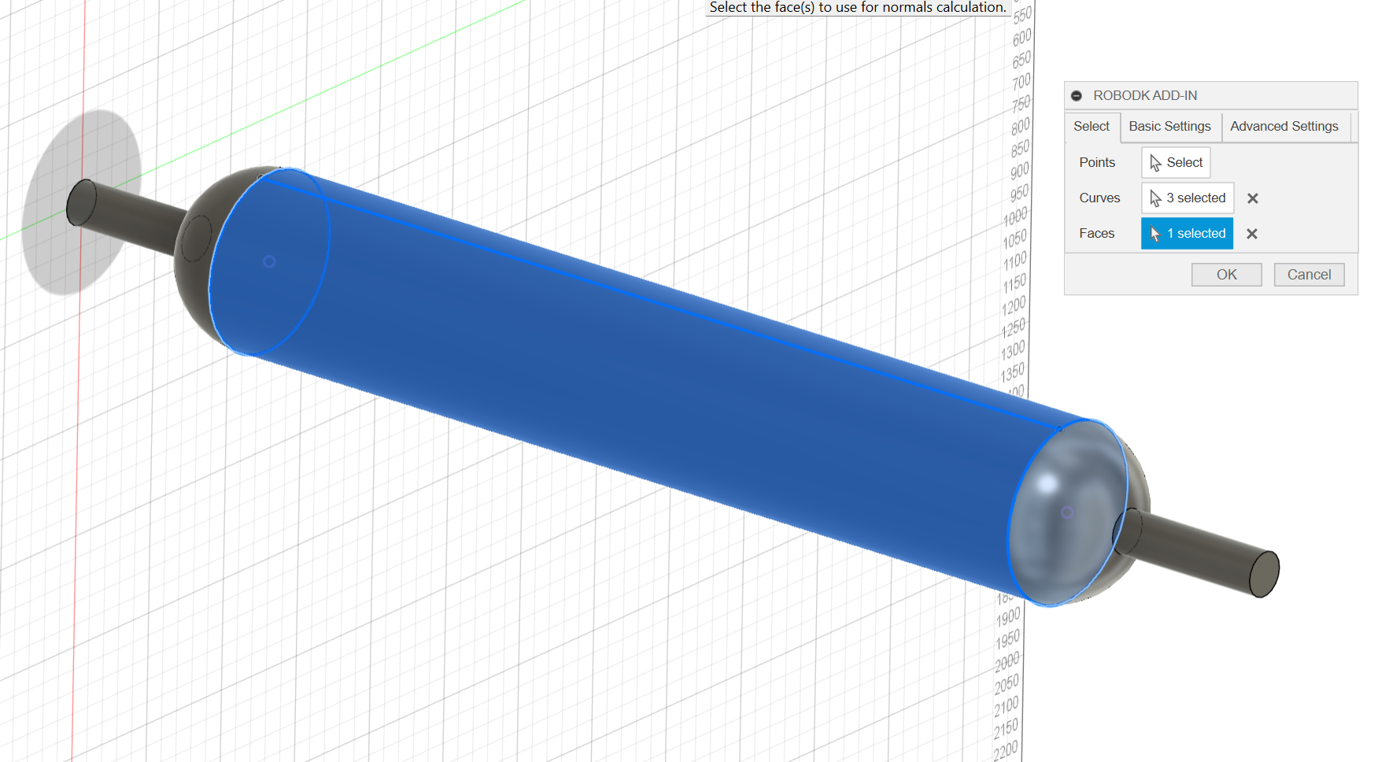
1.Seleccione las trayectorias de soldadura. Asegúrese de seleccionar también las caras, ya que ayudan a orientar la herramienta del robot.
2.Ahora que ha importado la trayectoria desde Fusion 360, puede ir a RoboDK.
3.Compruebe la posición de la ruta y cámbiele el nombre.
Configuración del proyecto de seguimiento de curvas
Una vez importados los modelos y las trayectorias de soldadura, el siguiente paso será crear los proyectos de seguimiento de curvas correspondientes.
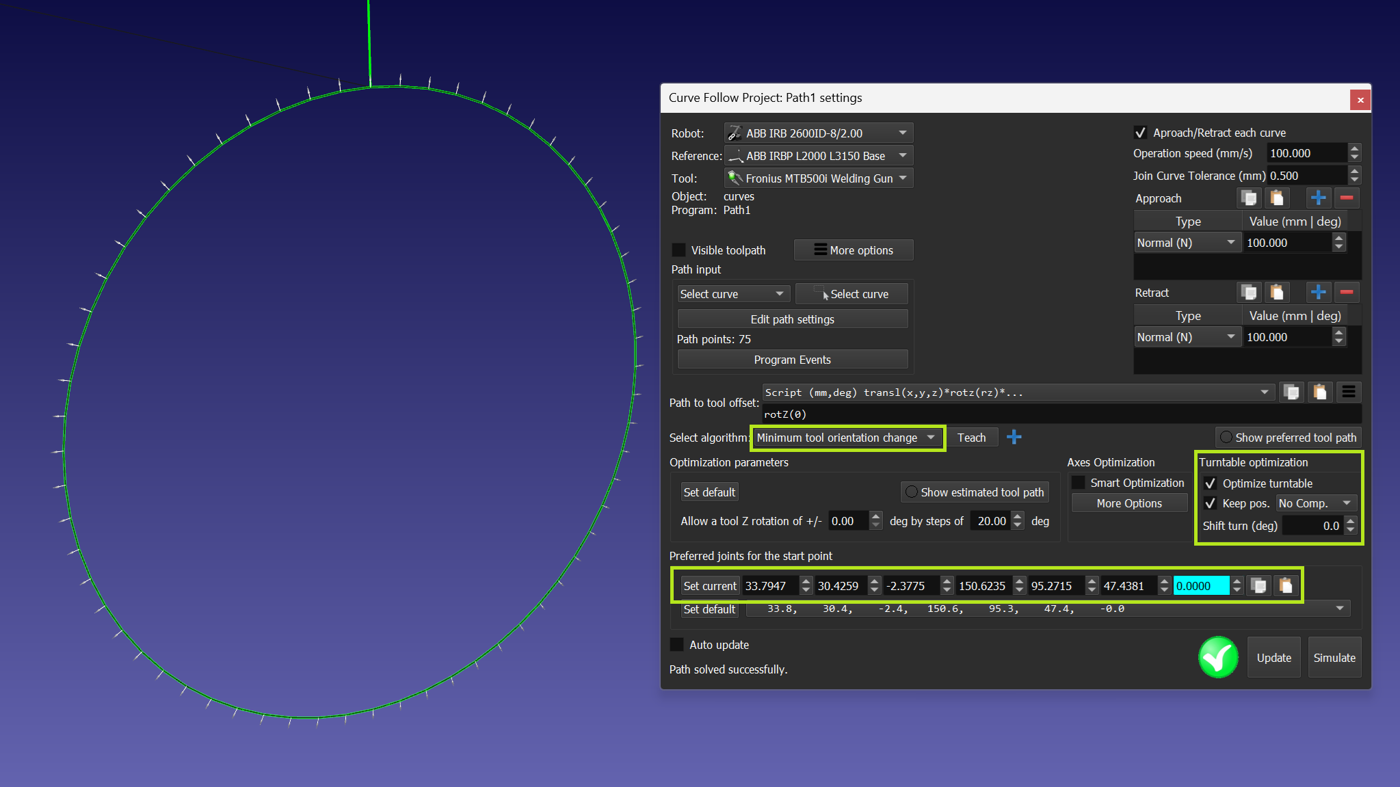
1.Cree el nuevo proyecto de seguimiento de curvas (Utilidades->Proyecto de seguimiento de curvas).
2.Seleccione la primera curva circular.
3.Utilice la posición TCP fija sin compensación.
4.Establezca explícitamente el punto de inicio y la orientación del TCP.
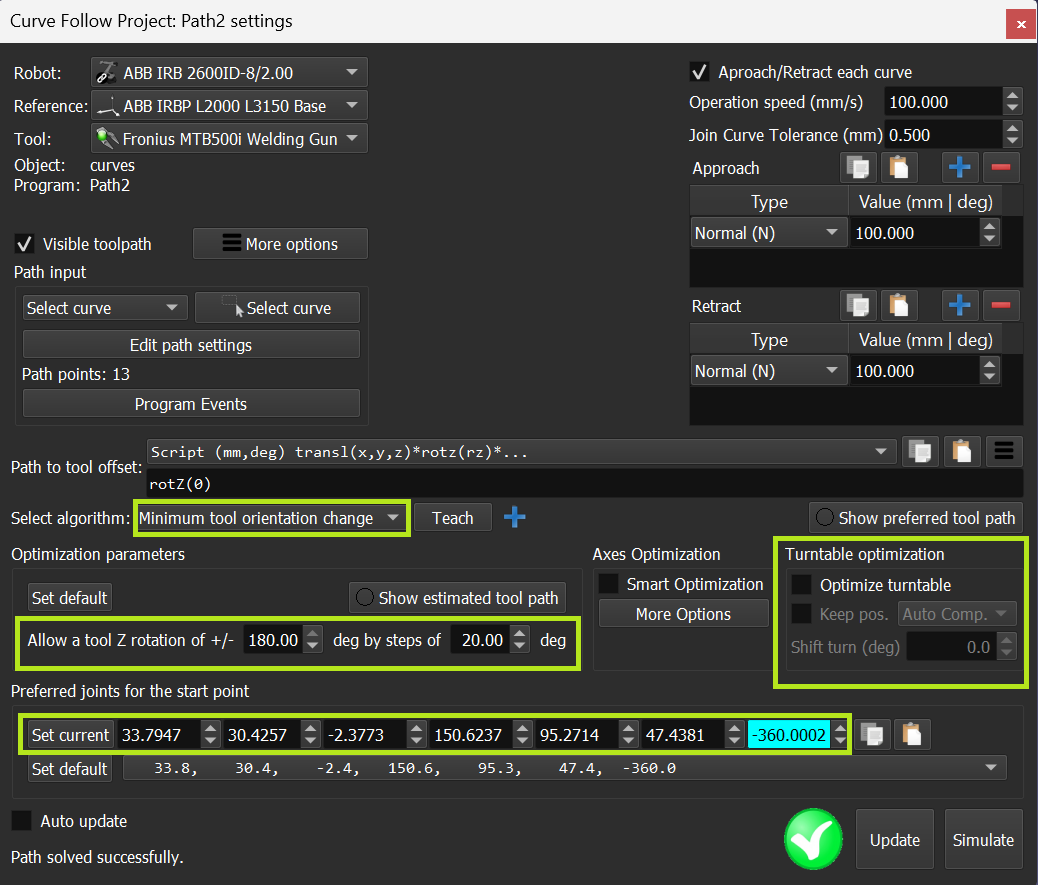
5.Cree el nuevo Proyecto de seguimiento de curva (Utilidades->Proyecto de seguimiento de curva) para una costura recta.
6.Excluya el uso de la rotación del posicionador y fije explícitamente el punto final de la trayectoria anterior como inicio de la nueva.
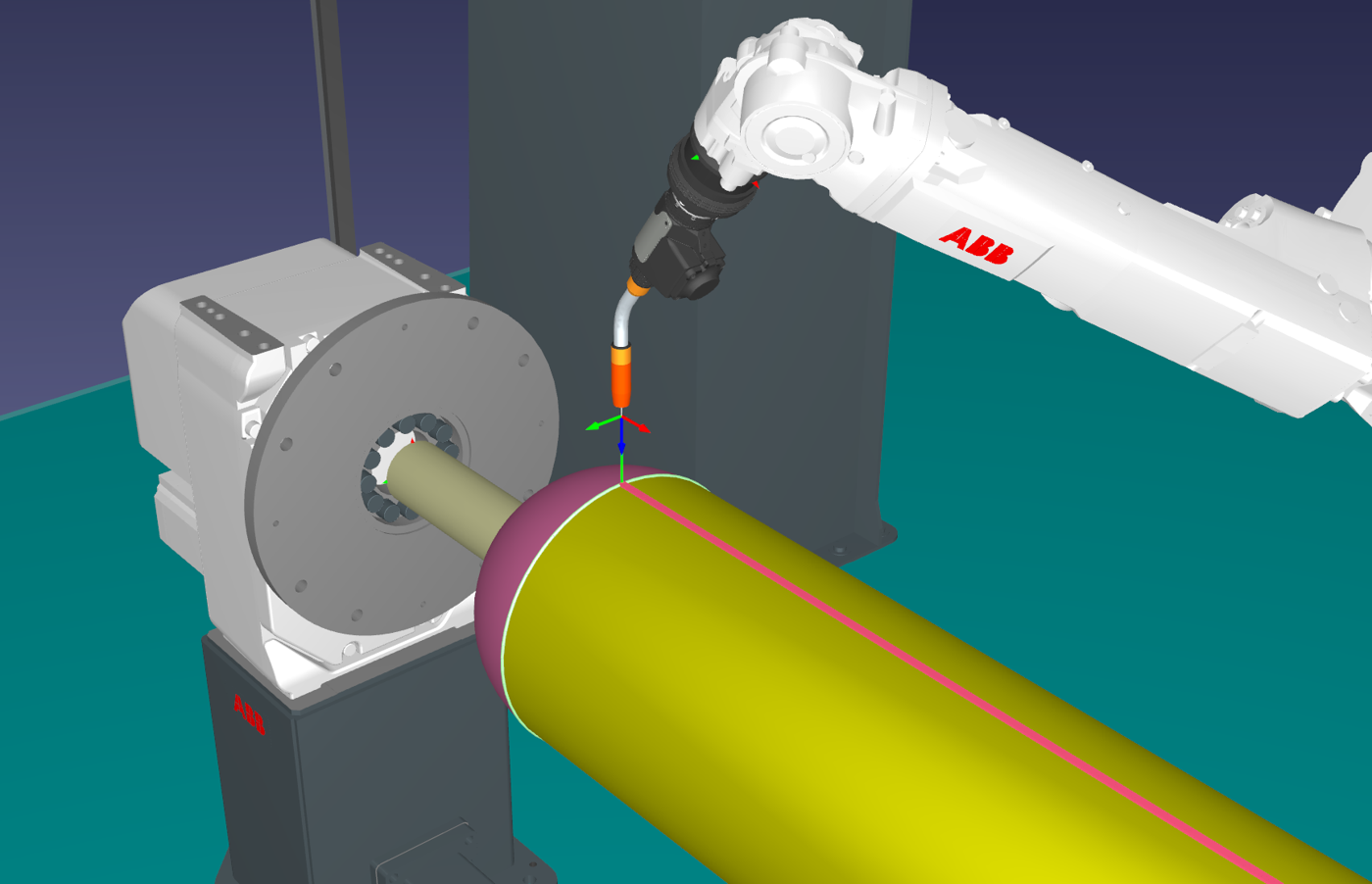
7.Cree una trayectoria para la segunda costura circular y utilice los mismos ajustes que para la primera.
Uso del Addin de soldadura
En esta sección aprenderá a aplicar el Addin de soldadura y a personalizar cada operación de soldadura. Utilizaremos las plantillas para las instrucciones de soldadura de los robots ABB.
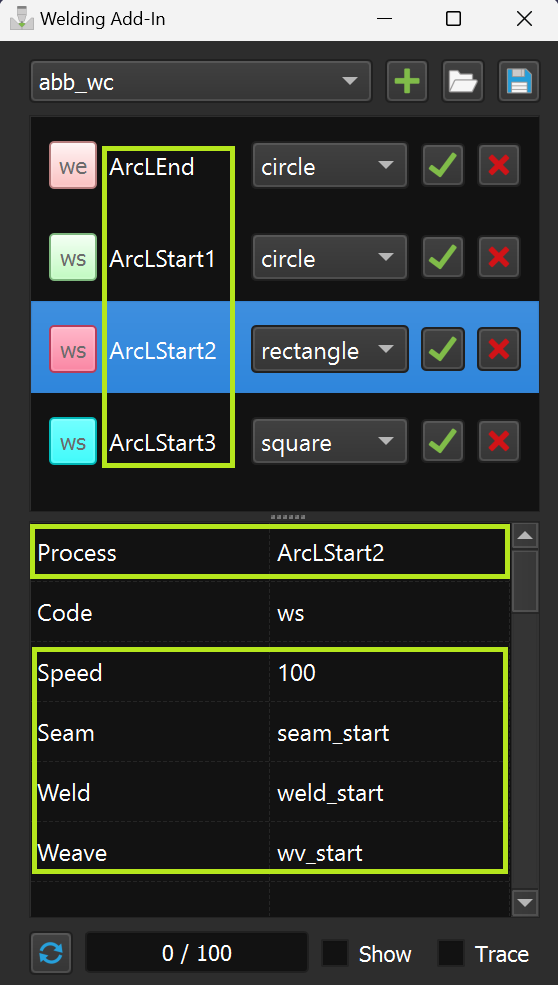
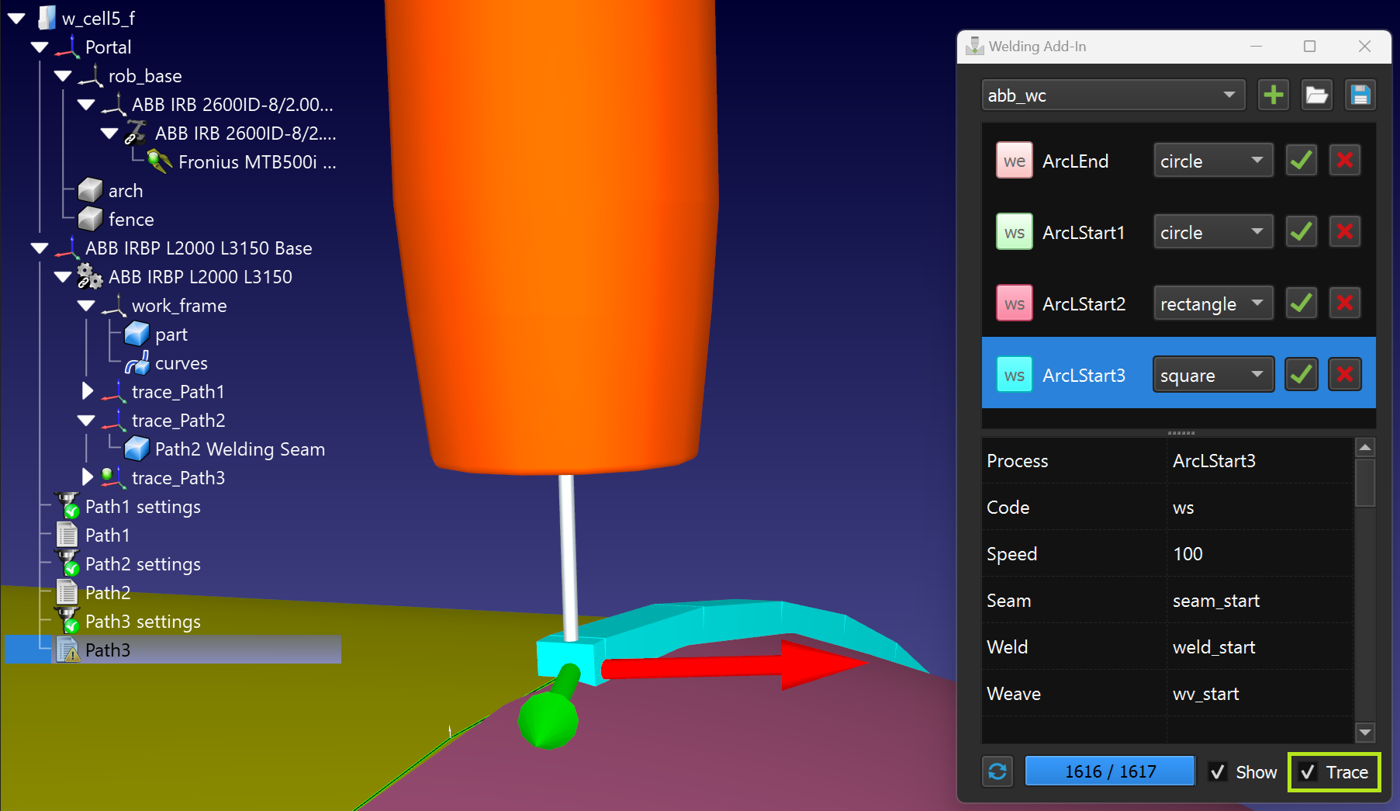
1.Inicie el Addin de soldadura y añada secuencialmente los modos de soldadura necesarios que vayamos a utilizar.
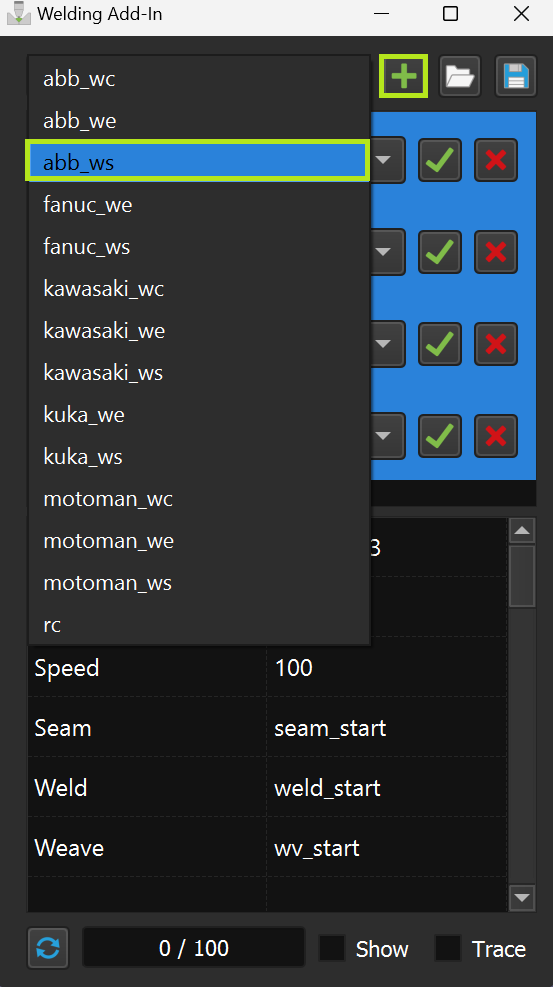
2.Cambie los nombres de los modos, ya que deben ser diferentes, y configure los parámetros
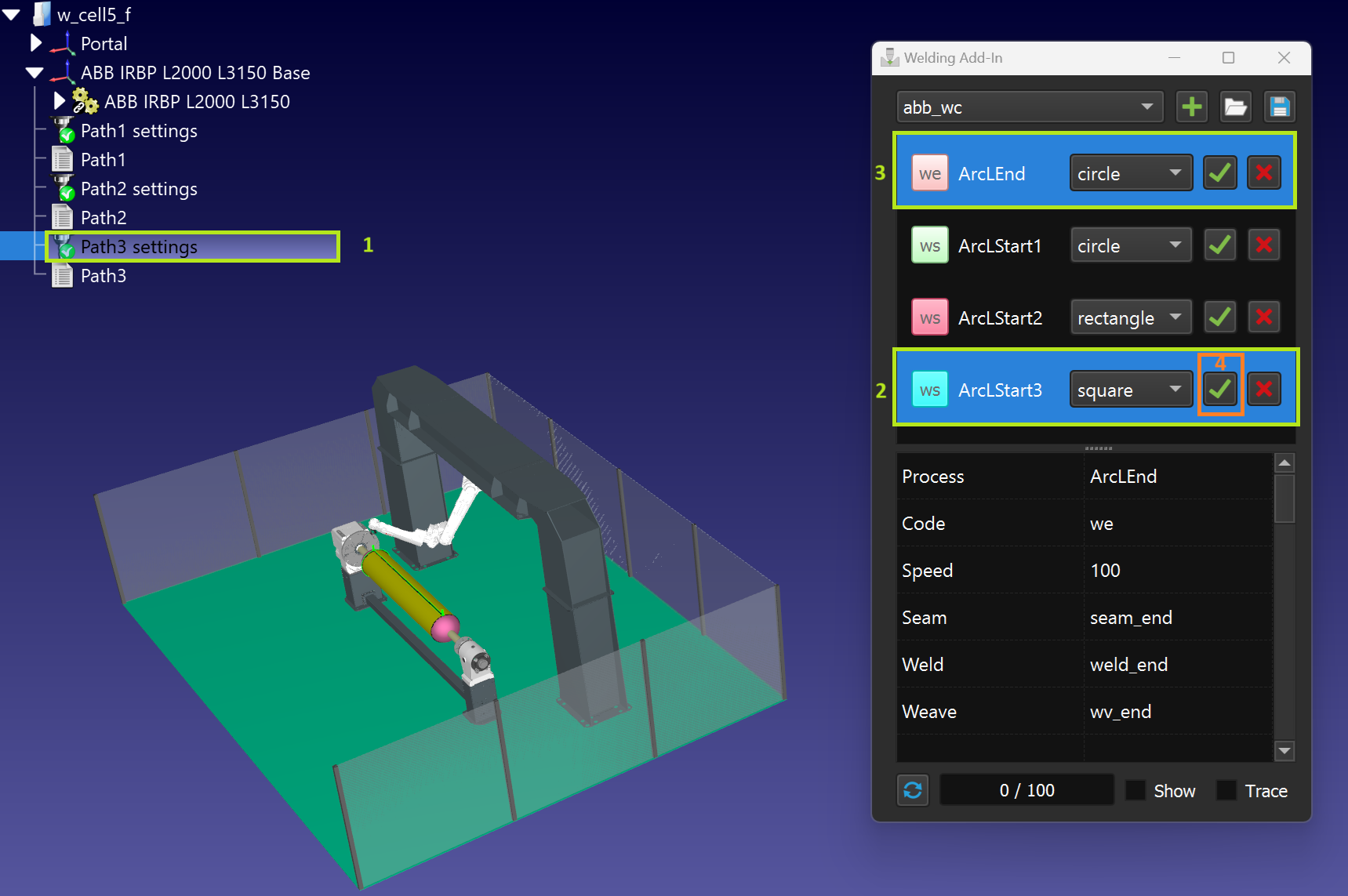
3.Para cada uno de los proyectos de seguimiento de curvas, seleccione y aplique las instrucciones para el inicio y el final de la soldadura (utilizando el botón Ctrl).
Por favor, preste atención a la secuencia de selección en la siguiente captura de pantalla.
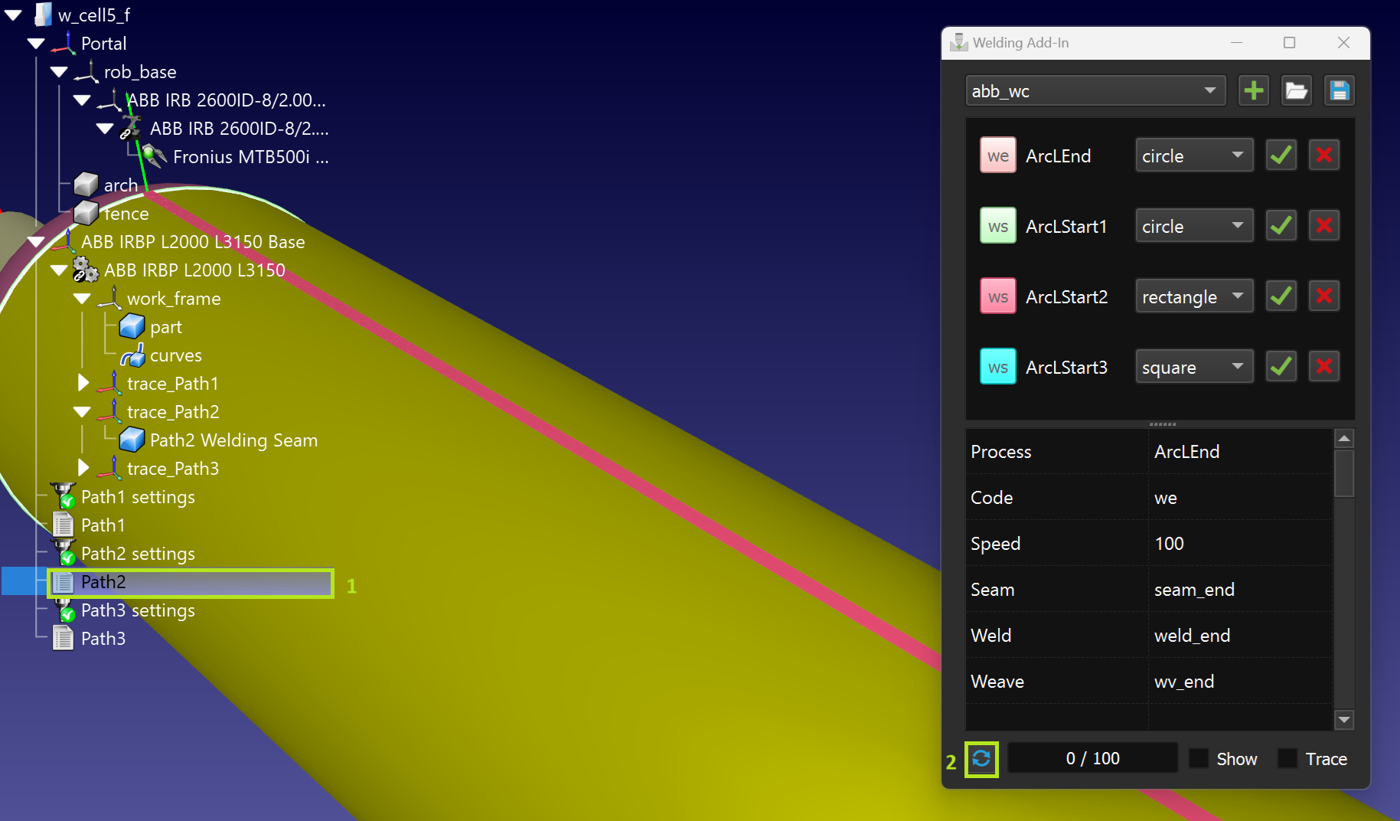
4.Seleccione los proyectos de seguimiento de curvas adecuados y pulse la combinación de teclas Ctrl + U para actualizarlos.
5.Puede construir una visualización para las trayectorias de soldadura.
6.Utilice la casilla de verificación de seguimiento para evaluar cómo se aplica el material de soldadura a medida que se ejecuta el programa.
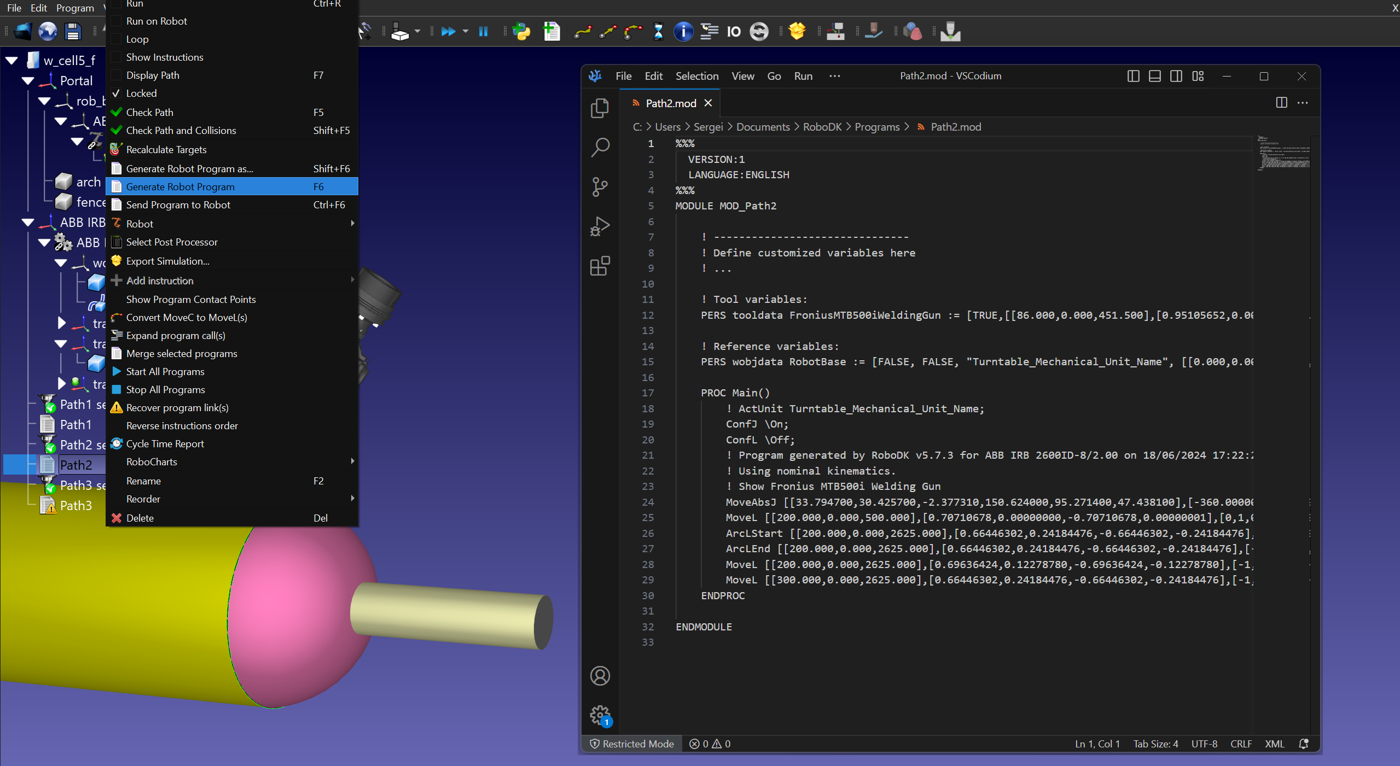
Generación de programas
Elija un postprocesador adecuado y compruebe el programa generado con comandos de soldadura: