Ruta de importación
Después de importar el modelo, hay que importar las trayectorias de soldadura.
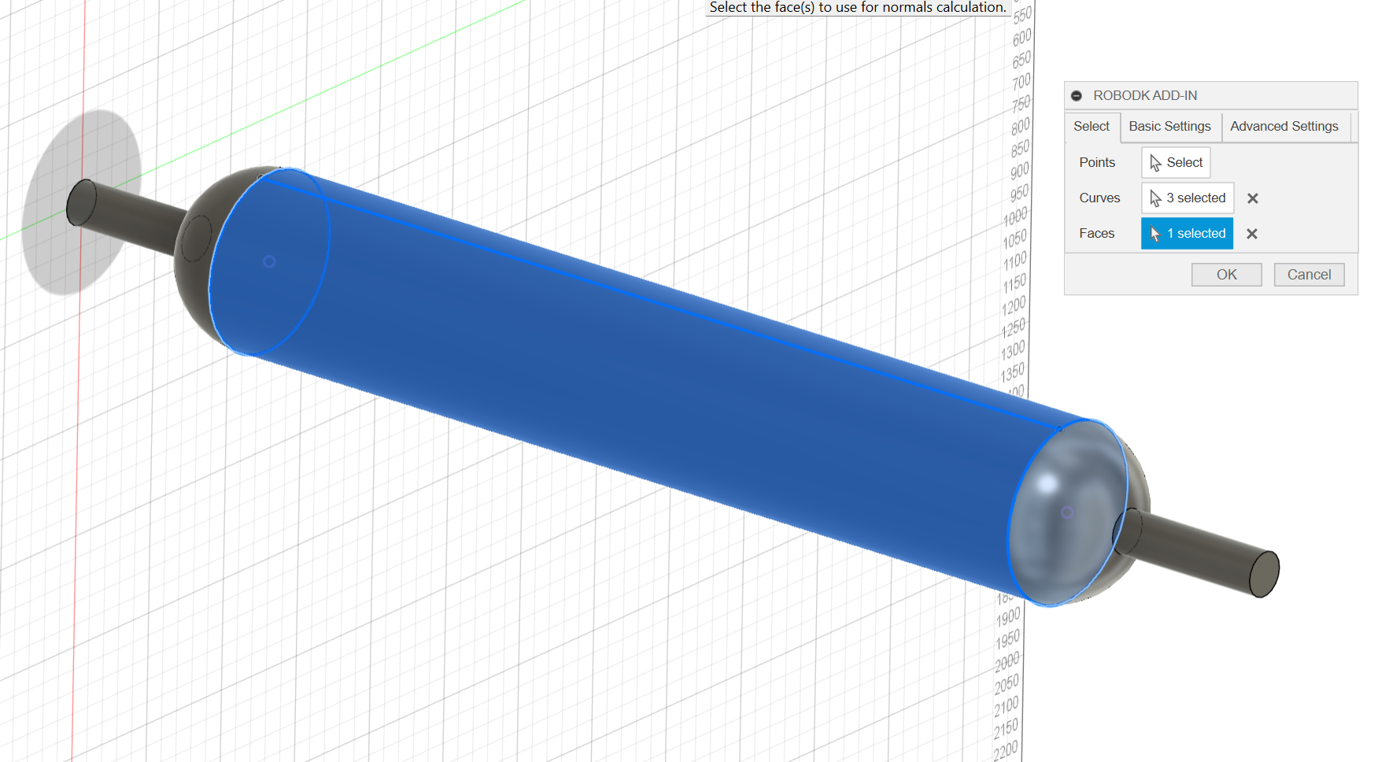
Importe la trayectoria desde Fusion 360:
1.Seleccione las trayectorias de soldadura. Asegúrese de seleccionar también las caras, ya que ayudan a orientar la herramienta del robot.
2.Ahora que ha importado la trayectoria desde Fusion 360, puede ir a RoboDK.
3.Compruebe la posición de la ruta y cámbiele el nombre.