Welding with Positionner
Introducción
Este ejemplo le mostrará cómo utilizar RoboDK para la simulación de soldadura de tanques. Este ejemplo incluye un modelo de muestra de tanque y una célula robotizada con un robot de soldadura ABB emparejado con un posicionador de un eje.
Sugerencia: Obtenga más información sobre el plugin de Fusion 360 en este enlace RoboDK.
Ejemplo de soldadura robotizada
Para realizar este proyecto de soldadura robotizada, primero debe seleccionar el ejemplo de soldadura robotizada con posicionador de RoboDK en la biblioteca por defecto. A continuación, deberá seleccionar las trayectorias de soldadura en Fusion 360. A continuación, deberá ajustar la trayectoria del robot en RoboDK.
Modelo de importación
Primero debe importar la pieza y las trayectorias de soldadura desde Fusion 360.
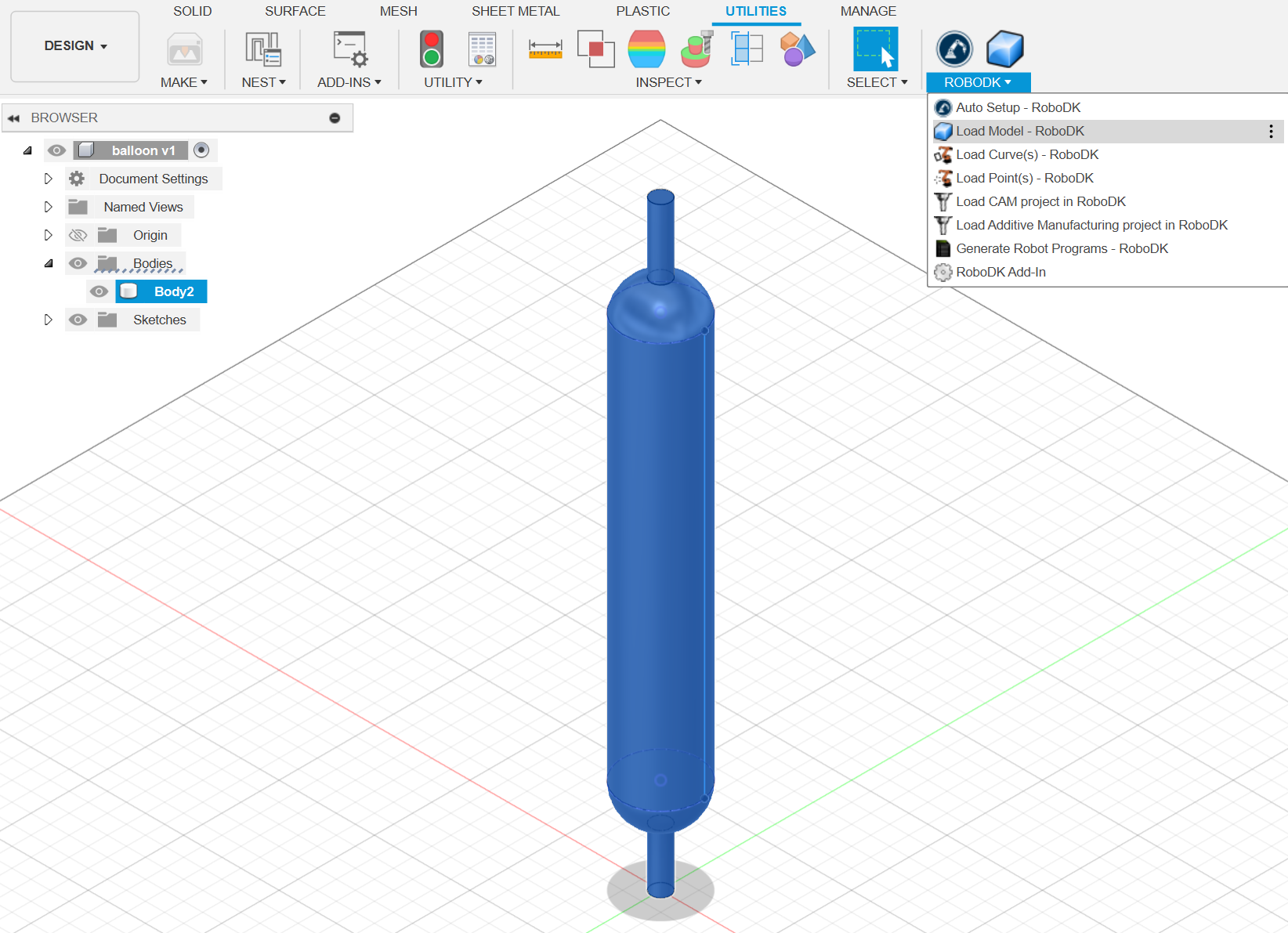
Importe el modelo desde Fusion 360:
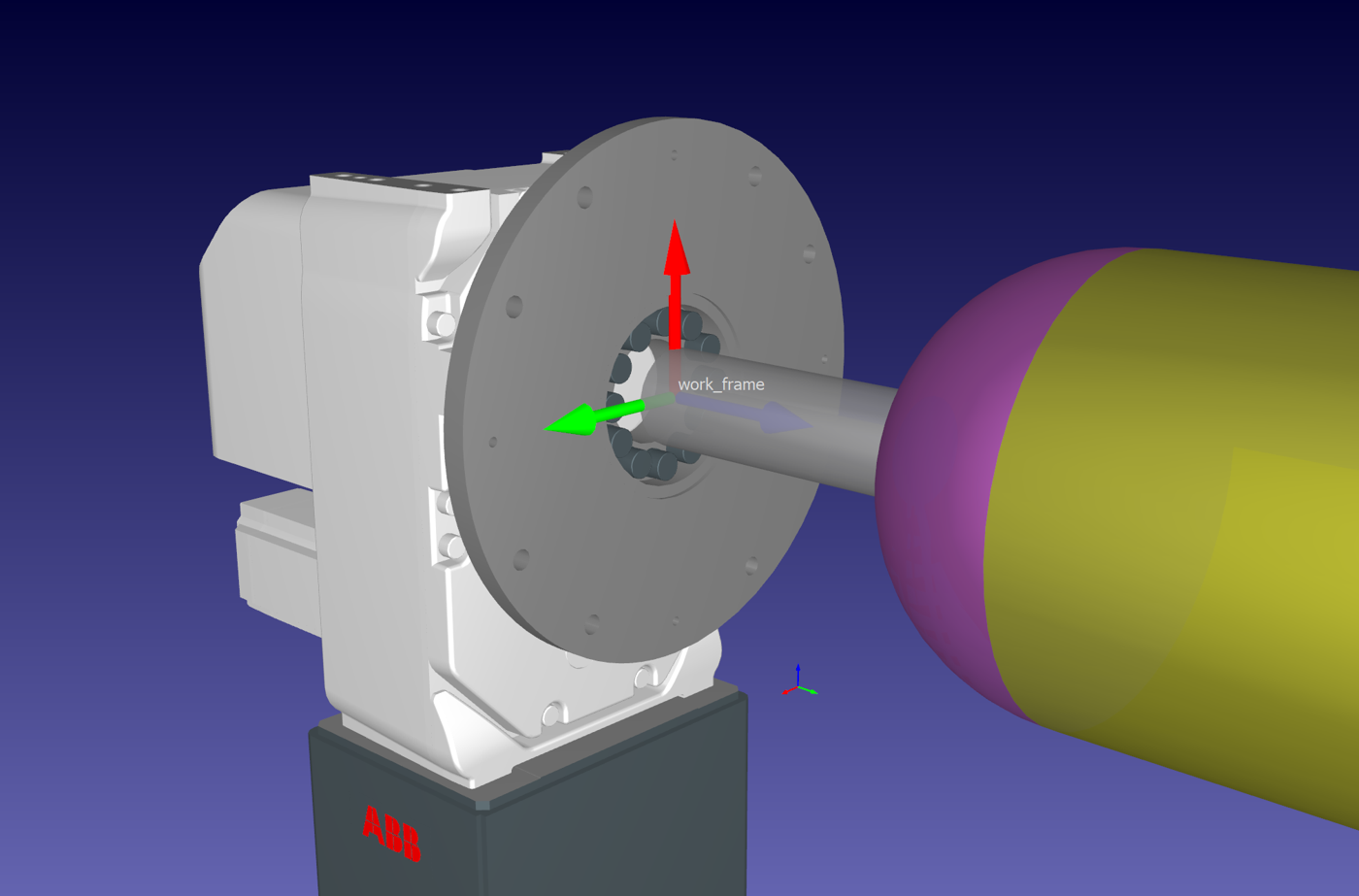
1.Seleccione el sistema de coordenadas de la brida del posicionador para la fijación del depósito en RoboDK.
2.Vaya a la pestaña RoboDK en las utilidades de Fusion 360 y seleccione Cargar modelo.
3.Compruebe la posición del modelo de tanque y cámbiele el nombre.
Ruta de importación
Después de importar el modelo, hay que importar las trayectorias de soldadura.
Importe la trayectoria desde Fusion 360:
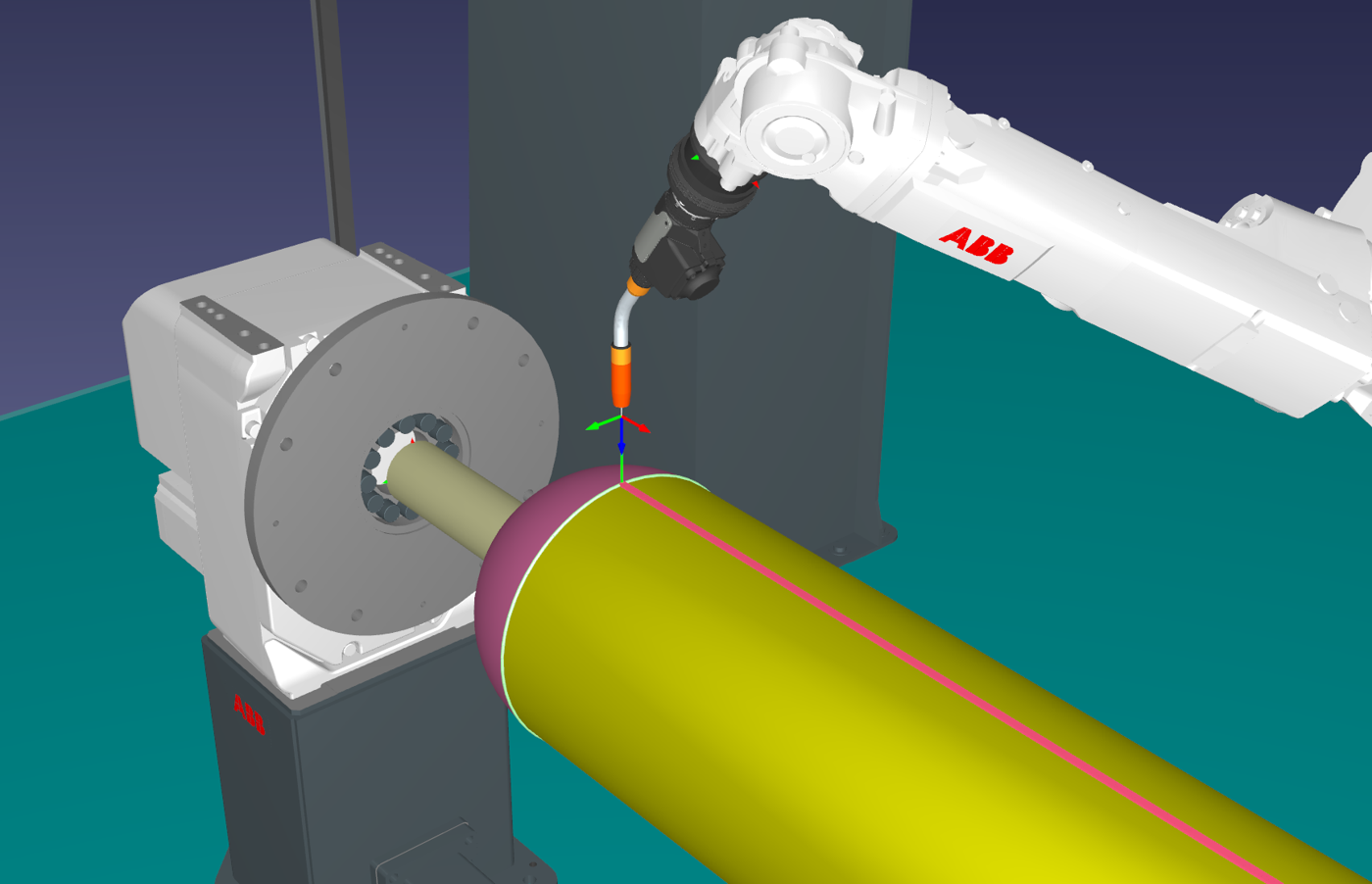
1.Seleccione las trayectorias de soldadura. Asegúrese de seleccionar también las caras, ya que ayudan a orientar la herramienta del robot.
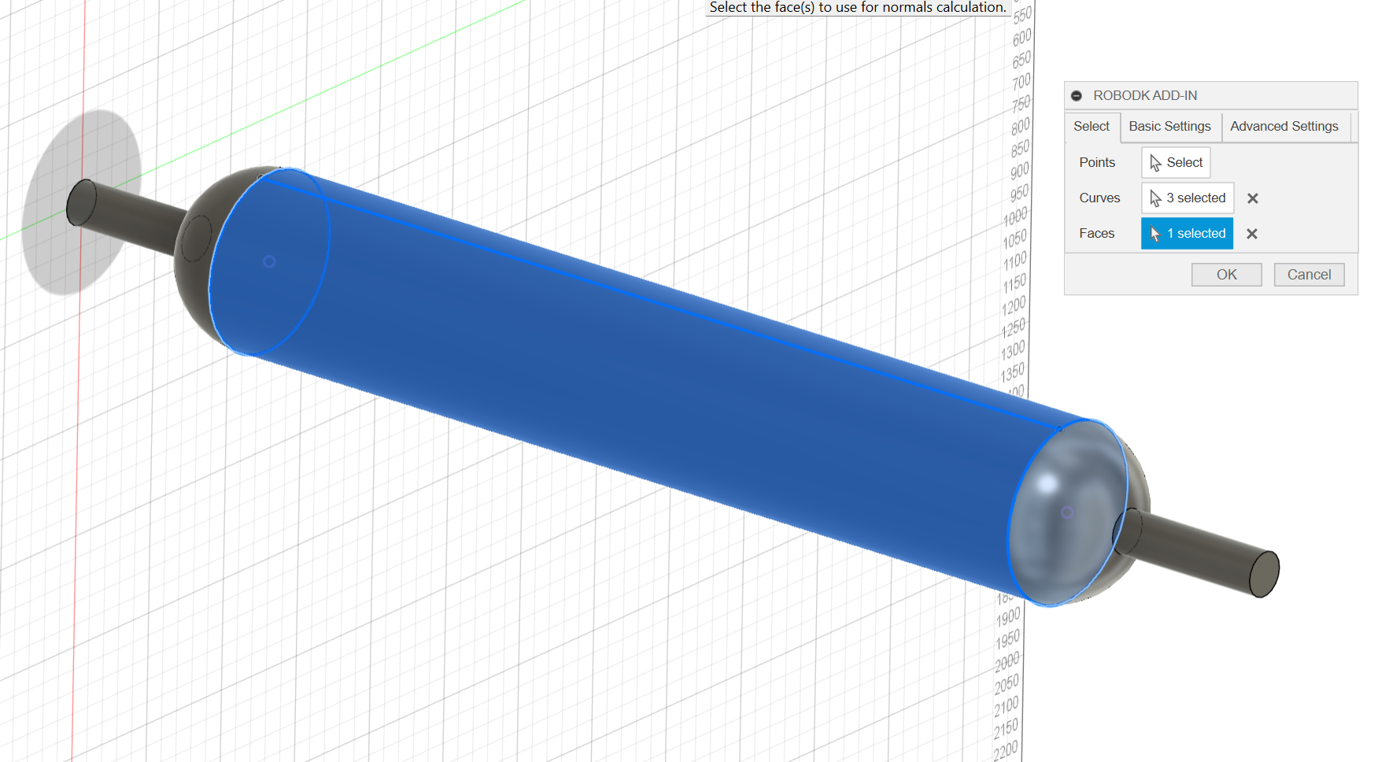
2.Ahora que ha importado la trayectoria desde Fusion 360, puede ir a RoboDK.
3.Compruebe la posición de la ruta y cámbiele el nombre.
Configuración del proyecto de seguimiento de curvas
Una vez importados los modelos y las trayectorias de soldadura, el siguiente paso será crear los proyectos de seguimiento de curvas correspondientes.
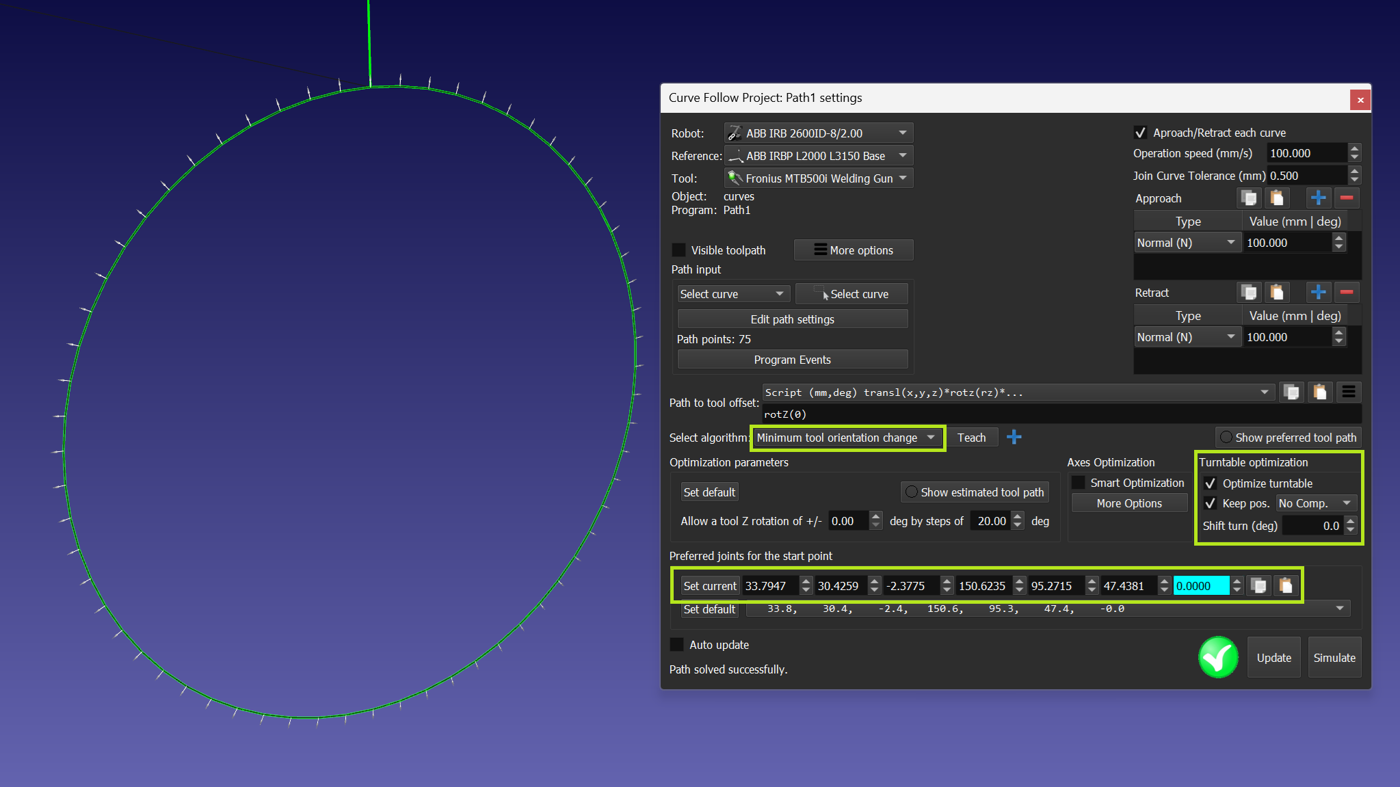
1.Cree el nuevo proyecto de seguimiento de curvas (Utilidades->Proyecto de seguimiento de curvas).
2.Seleccione la primera curva circular.
3.Utilice la posición TCP fija sin compensación.
4.Establezca explícitamente el punto de inicio y la orientación del TCP.
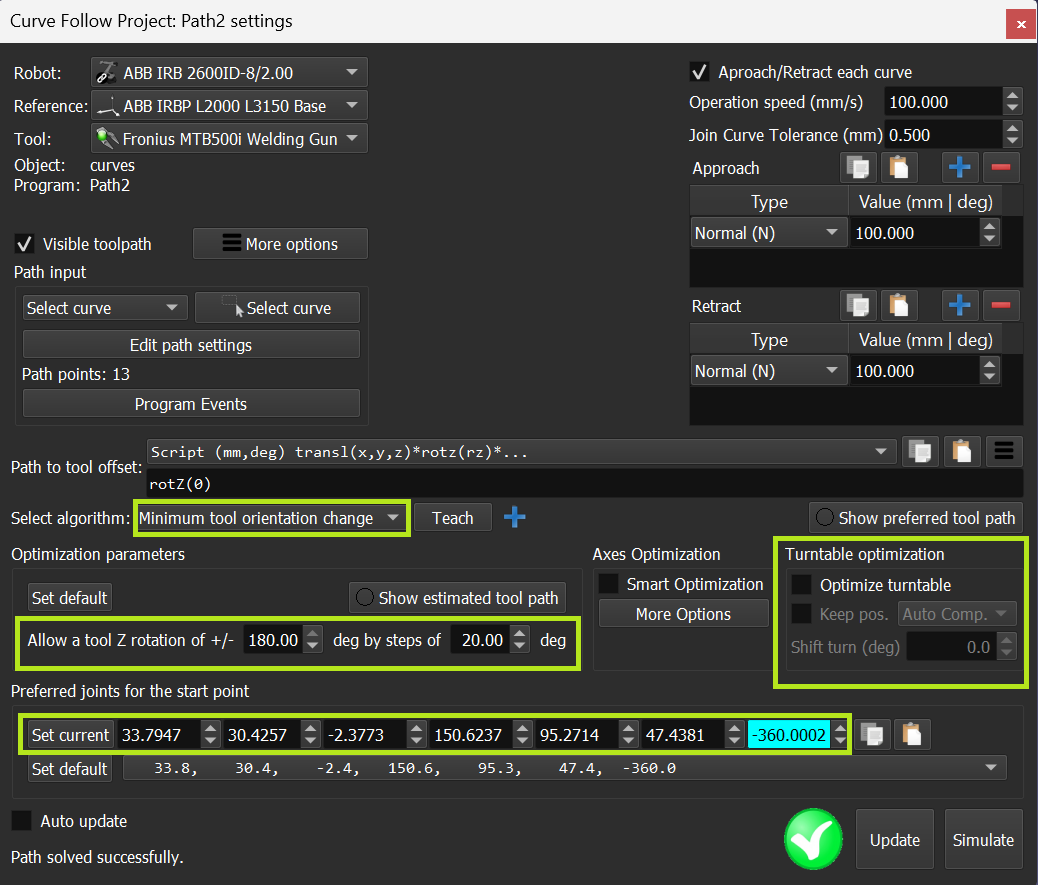
5.Cree el nuevo Proyecto de seguimiento de curva (Utilidades->Proyecto de seguimiento de curva) para una costura recta.
6.Excluya el uso de la rotación del posicionador y fije explícitamente el punto final de la trayectoria anterior como inicio de la nueva.
7.Cree una trayectoria para la segunda costura circular y utilice los mismos ajustes que para la primera.
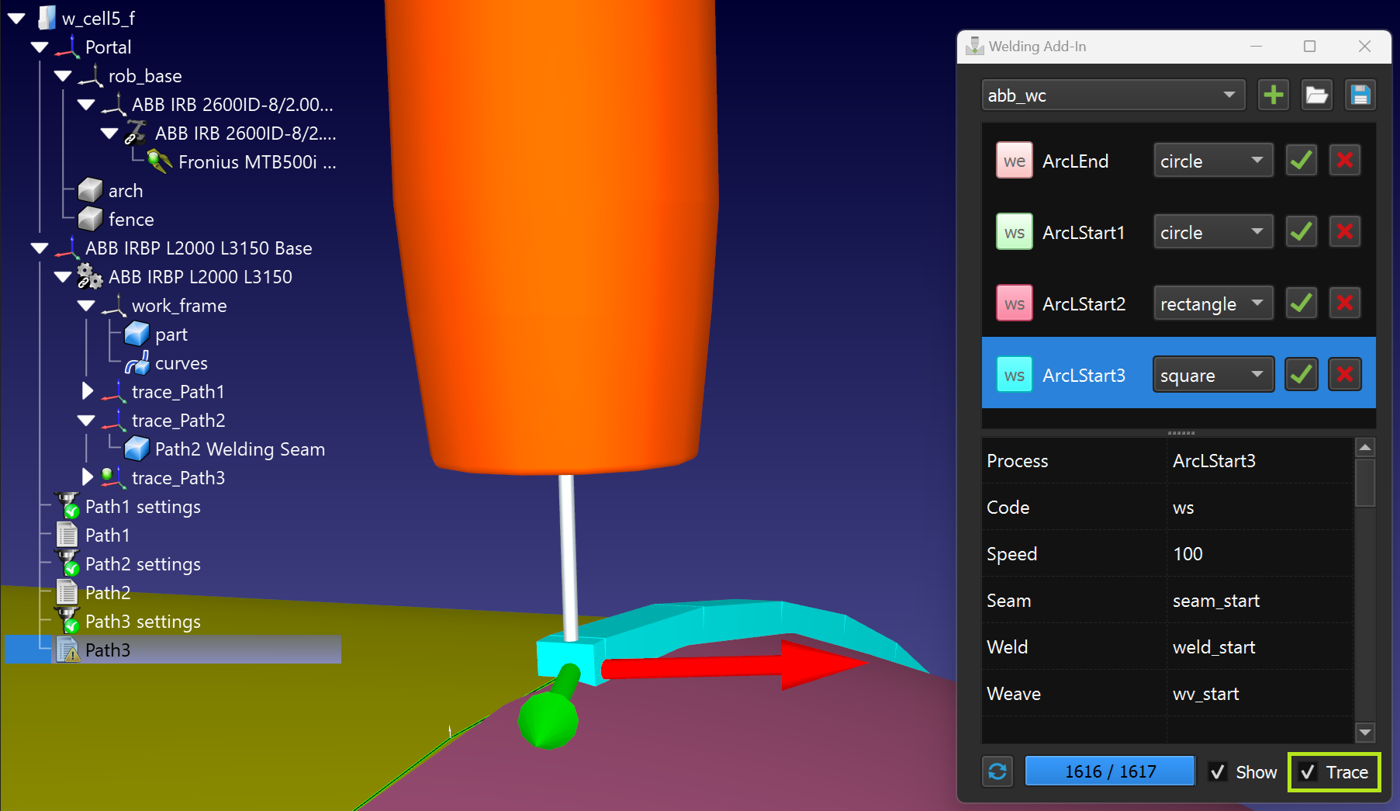
Uso del Addin de soldadura
En esta sección aprenderá a aplicar el Addin de soldadura y a personalizar cada operación de soldadura. Utilizaremos las plantillas para las instrucciones de soldadura de los robots ABB.
1.Inicie el Addin de soldadura y añada secuencialmente los modos de soldadura necesarios que vayamos a utilizar.
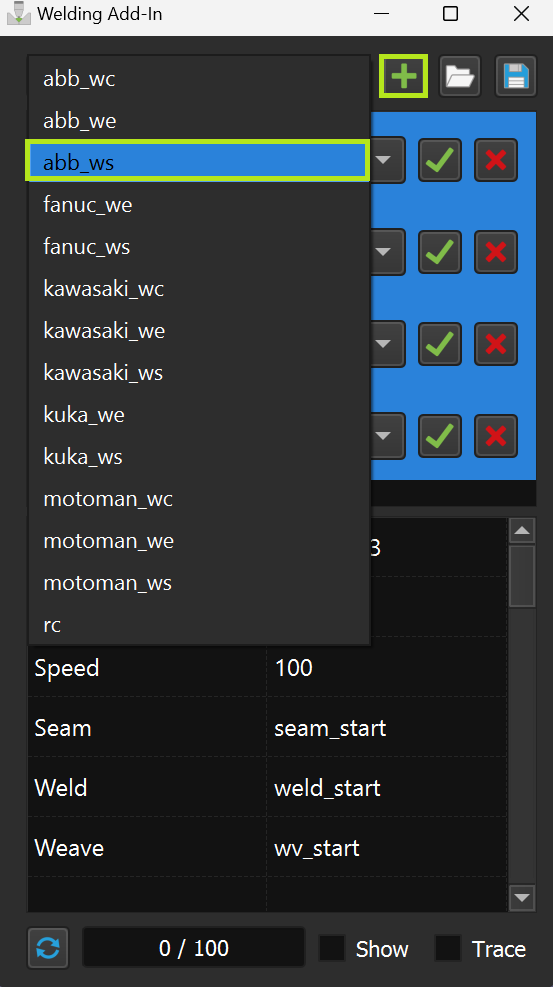
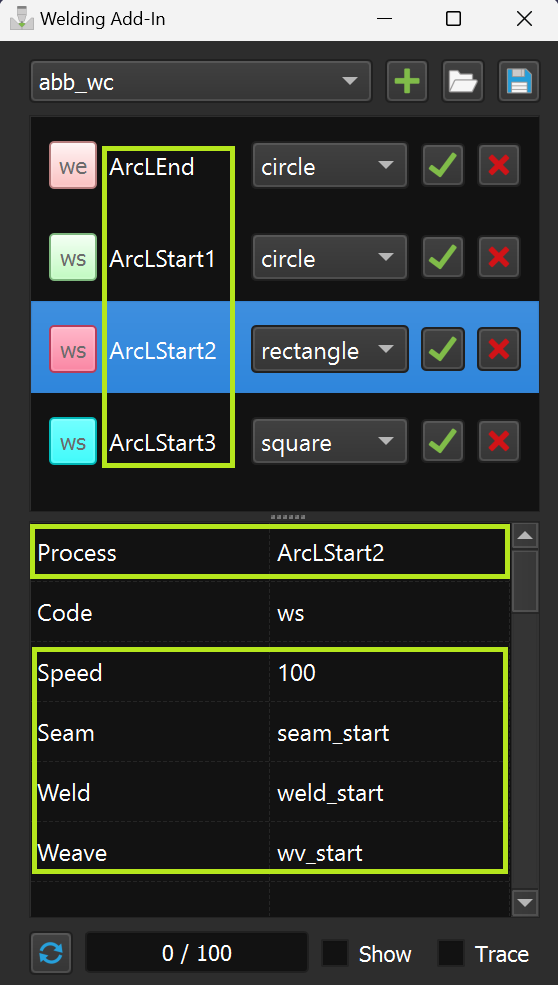
2.Cambie los nombres de los modos, ya que deben ser diferentes, y configure los parámetros
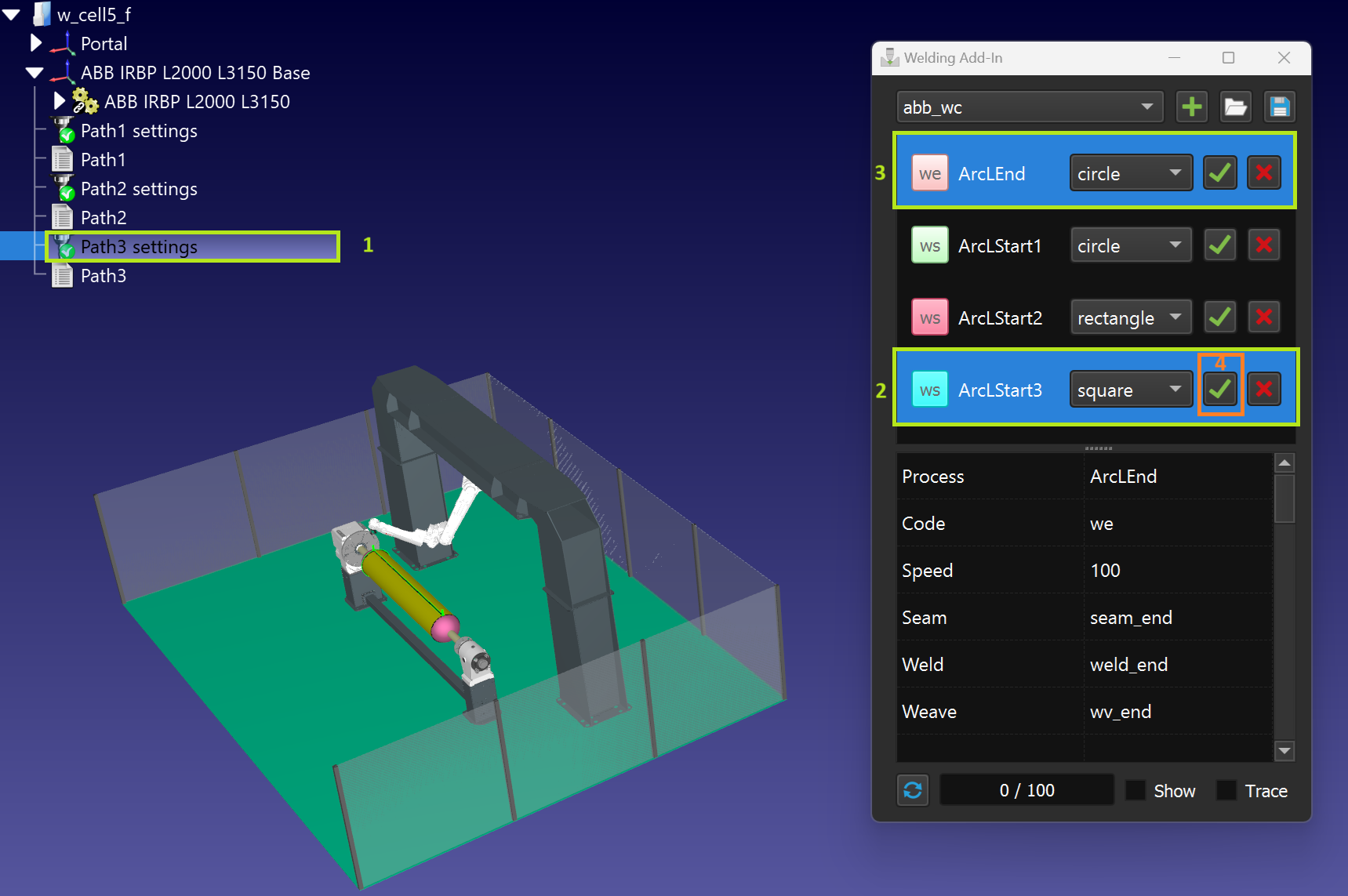
3.Para cada uno de los proyectos de seguimiento de curvas, seleccione y aplique las instrucciones para el inicio y el final de la soldadura (utilizando el botón Ctrl).
Por favor, preste atención a la secuencia de selección en la siguiente captura de pantalla.
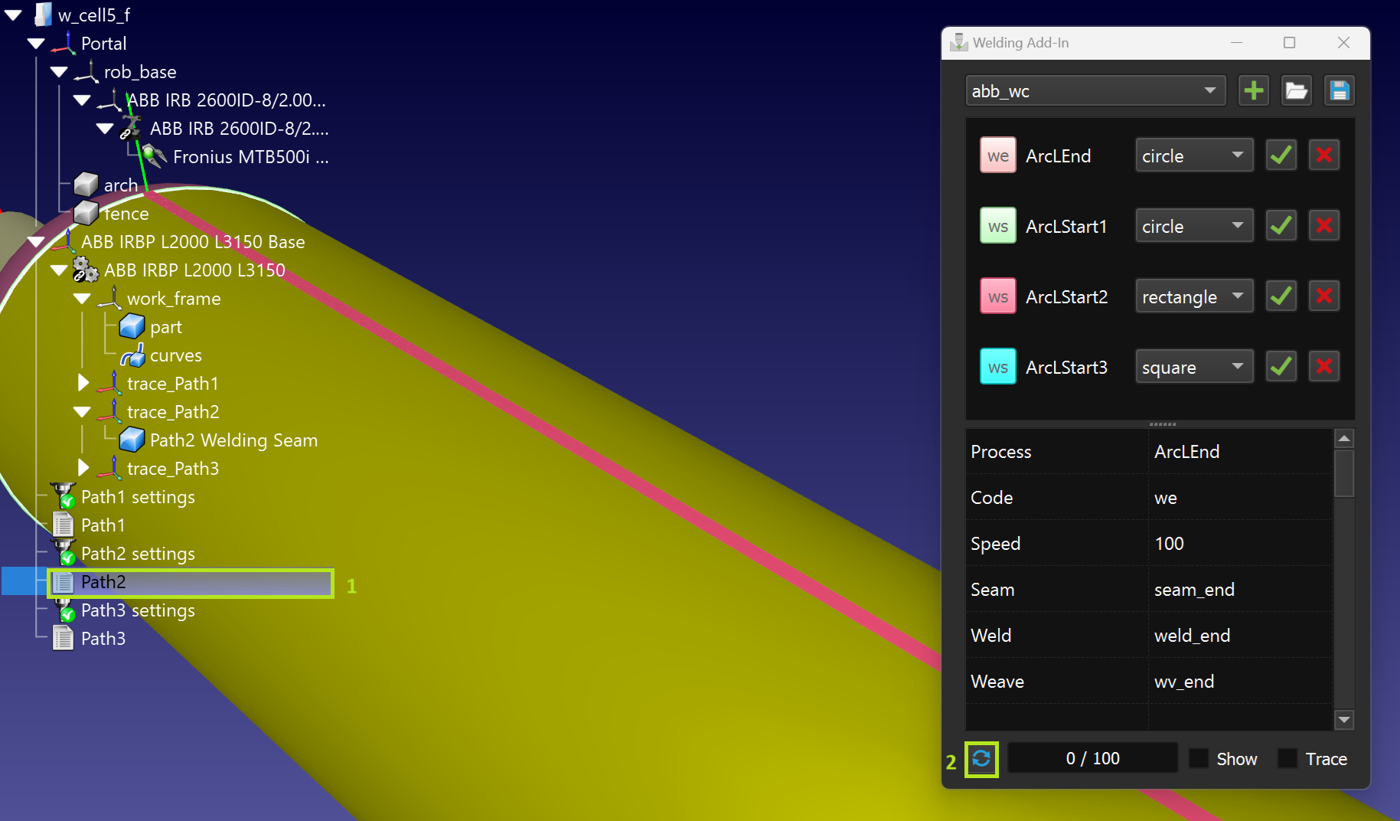
4.Seleccione los proyectos de seguimiento de curvas adecuados y pulse la combinación de teclas Ctrl + U para actualizarlos.
5.Puede construir una visualización para las trayectorias de soldadura.
6.Utilice la casilla de verificación de seguimiento para evaluar cómo se aplica el material de soldadura a medida que se ejecuta el programa.
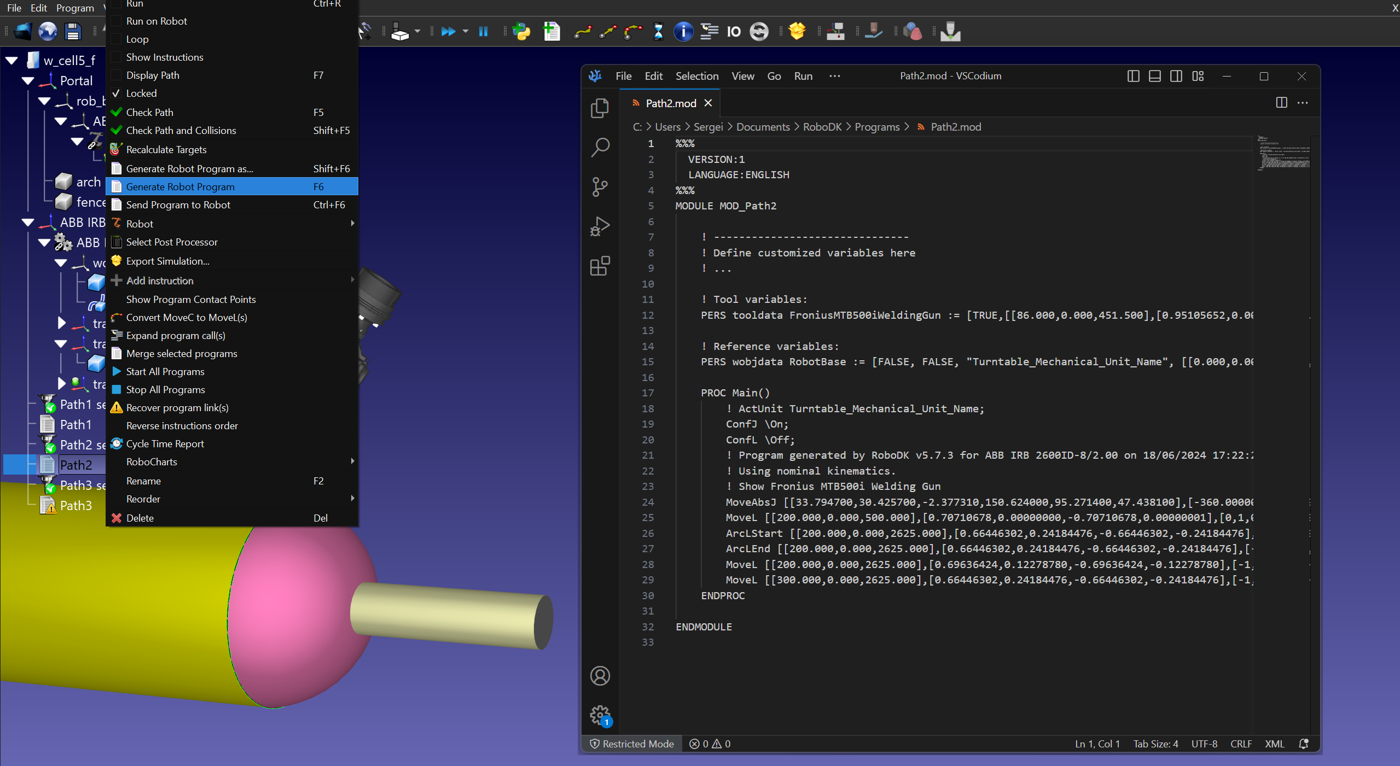
Generación de programas
Elija un postprocesador adecuado y compruebe el programa generado con comandos de soldadura: