Robot Welding
Introducción
Este ejemplo le mostrará cómo utilizar el plugin RoboDK para SolidWorks. Este ejemplo incluye una mesa y 2 angulares para mostrarle cómo puede utilizar la función de RoboDK para mejorar sus trayectorias de soldadura.
Con el plugin RoboDK para SolidWorks, puede programar fácilmente un robot industrial para soldadura. Este ejemplo incluye una mesa y 2 escuadras para mostrarle cómo puede utilizar RoboDK para mejorar sus trayectorias de soldadura.
Sugerencia: Obtenga más información sobre el Addin de RoboDK para SolidWorks en la sección SolidWorksAddin de RoboDK para.
Ejemplo de soldadura robotizada
Para realizar este proyecto de soldadura de robots, primero debe seleccionar el ejemplo de soldadura de robots RoboDK en la biblioteca predeterminada. A continuación, debe seleccionar las trayectorias/esquemas de soldadura en SolidWorks. A continuación, deberá ajustar la trayectoria del robot en RoboDK.
Configuración
Primero debe importar la pieza y las trayectorias de soldadura desde SolidWorks.
Sugerencia: Consulte nuestro primer vídeo para obtener más información sobre la importación de piezas, curvas y puntos desde SolidWorks: https://www.youtube.com/watch?v=mF6Fn6HxHJ8.
Importe el proyecto desde SolidWorks:
1.Vaya a la pestaña RoboDK de SolidWorks y seleccione Configuración automática.
2.Seleccione las trayectorias de soldadura. Asegúrese de seleccionar también las caras, ya que ayudan a orientar la herramienta del robot.
3.Ahora que ha importado la trayectoria desde SolidWorks, puede ir a RoboDK.
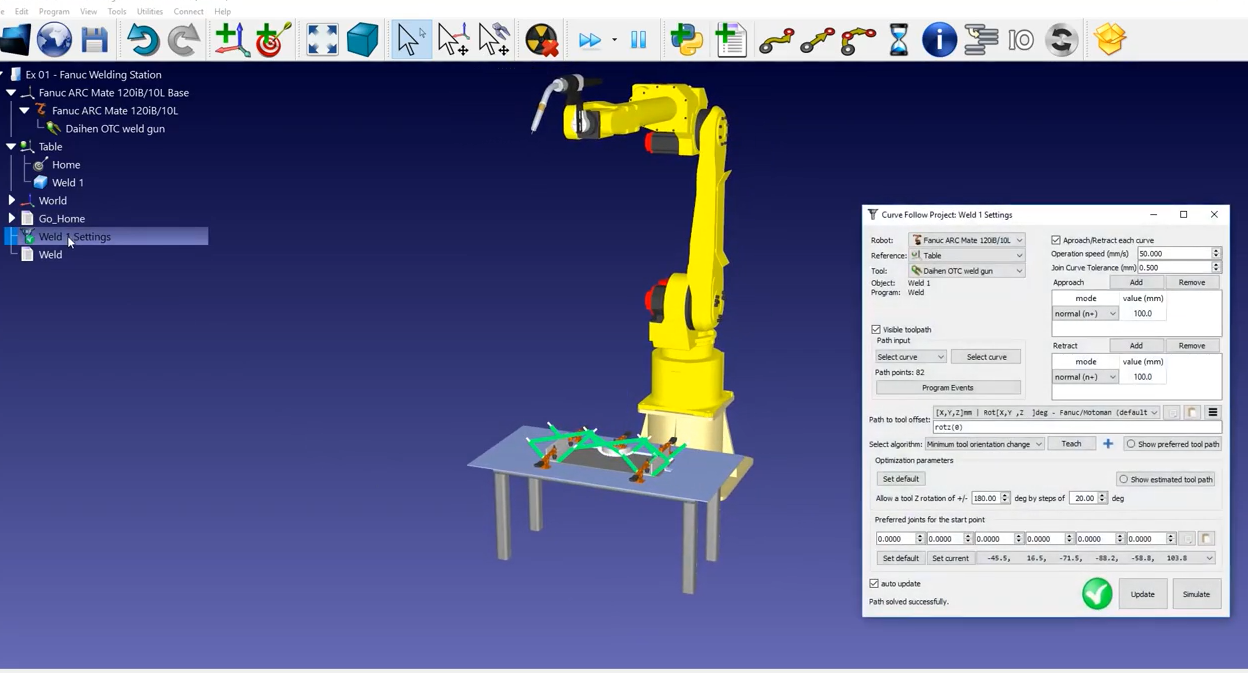
4.En el árbol de estaciones, haga clic en Ajustes de Soldadura1 que abrirá el Proyecto de Seguimiento de Curvas.
5.Haga clic en Actualizar para generar el programa y después en Simular.
Boceto 2D de SolidWorks
En esta sección aprenderá a mejorar o personalizar el orden de movimiento de cada curva de soldadura. La pistola de soldar sigue la trayectoria como se supone que debe hacerlo. Sin embargo, podemos ver que la orientación está un poco desviada y que la trayectoria dista mucho de ser óptima.
En primer lugar, debe arreglar la propia ruta:
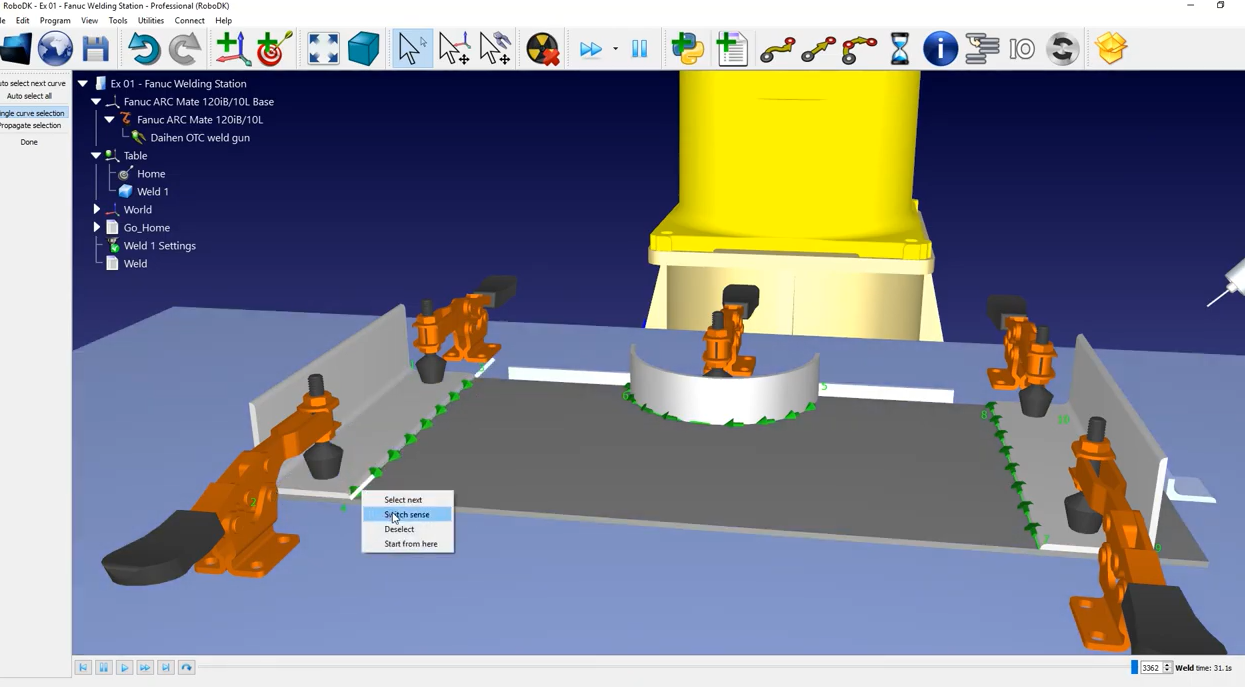
1.En el Proyecto de seguimiento de curvas, haga clic en Seleccionar curva (pasando de 1 a 2, luego de 3 a 4, de 5 a 6, de 7 a 8 y de 9 a 10).
2. El orden de las secciones de soldadura tiene sentido. Sin embargo, la dirección de soldadura no parece tener sentido.
3.Para cambiar la dirección de una ruta de soldadura (como la ruta 3 a la 4), haga clic con el botón derecho del ratón en la ruta y seleccione Invertir dirección - puede ver que las flechas de esa ruta cambiaron de dirección.
4.Puede hacer lo mismo para la ruta 5 a 6 y la ruta 7 a 8.
5.Una vez realizadas las modificaciones, puede seleccionar Hecho en la ventana de la derecha.
6.Pulse Actualizar para generar el programa y Simular para iniciar la simulación.
Ahora que el orden de las trayectorias parece tener más sentido, puede ajustar la orientación de la herramienta a lo largo de la trayectoria para mejorar el movimiento del robot.
7.En el menú Proyecto de seguimiento de curvas, haga clic en Mostrar trayectoria de herramienta preferida. Aparecerá una variedad de herramientas fantasma que le mostrarán la orientación de la herramienta para diferentes posiciones a lo largo de la trayectoria.
8.La primera opción de orientación de la herramienta que puede probar es el desplazamiento de la trayectoria a la herramienta alrededor del eje "Z". Para ello, puede introducir manualmente un valor o pasar el ratón por encima y utilizar la rueda de desplazamiento para subir o bajar el valor.
9.Al hacerlo, podrá ver cómo cambia la orientación de la herramienta fantasma.
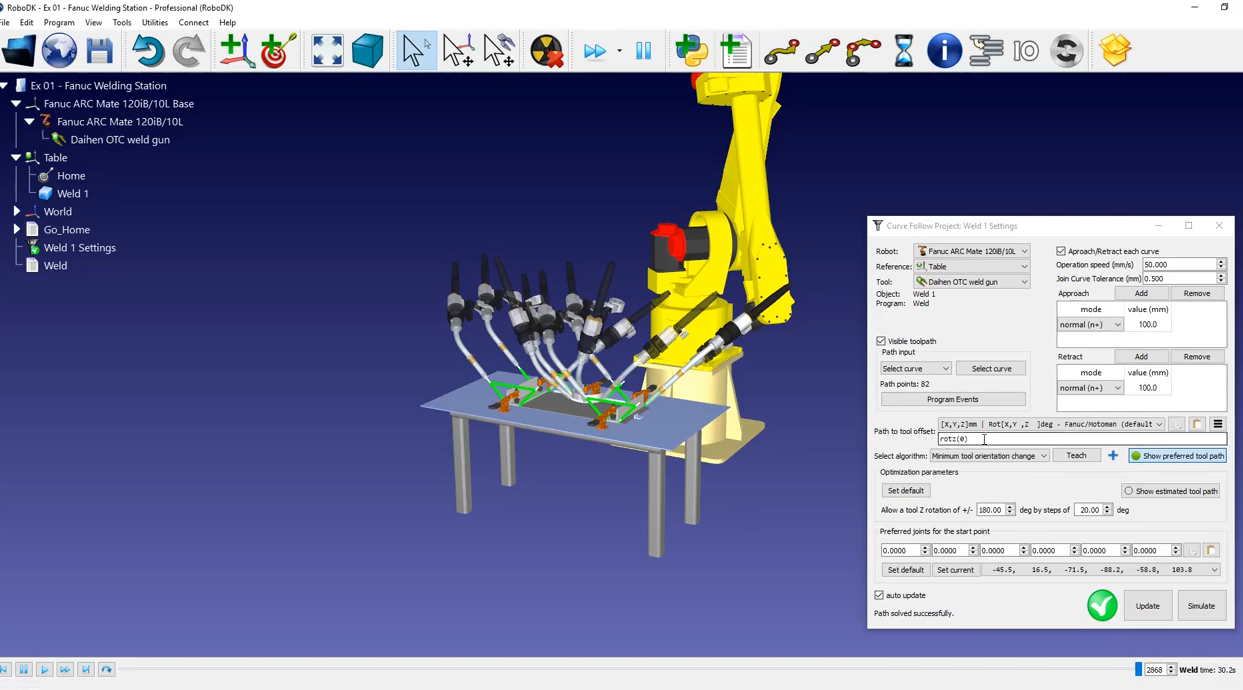
En este caso, la opción básica no parece solucionar nuestro problema. Afortunadamente, puede disponer de más opciones con las que trabajar; puede revelarlas pulsando el botón azul más y cambiarlas según su proyecto.
10.Puede cambiar la rotación alrededor del eje Z (rotz) a su valor original, cero, y después pulsar el botón "+Z".
11.Como puede ver con las herramientas fantasma, la brida del robot siempre estará encima de la pieza. Haga clic en Actualizar y después en Simular para simular el resultado.
12.Si utiliza la barra de desplazamiento, la nueva orientación de la herramienta facilita la gestión de los cables de la herramienta; no hay riesgo de que interfiera con el robot.
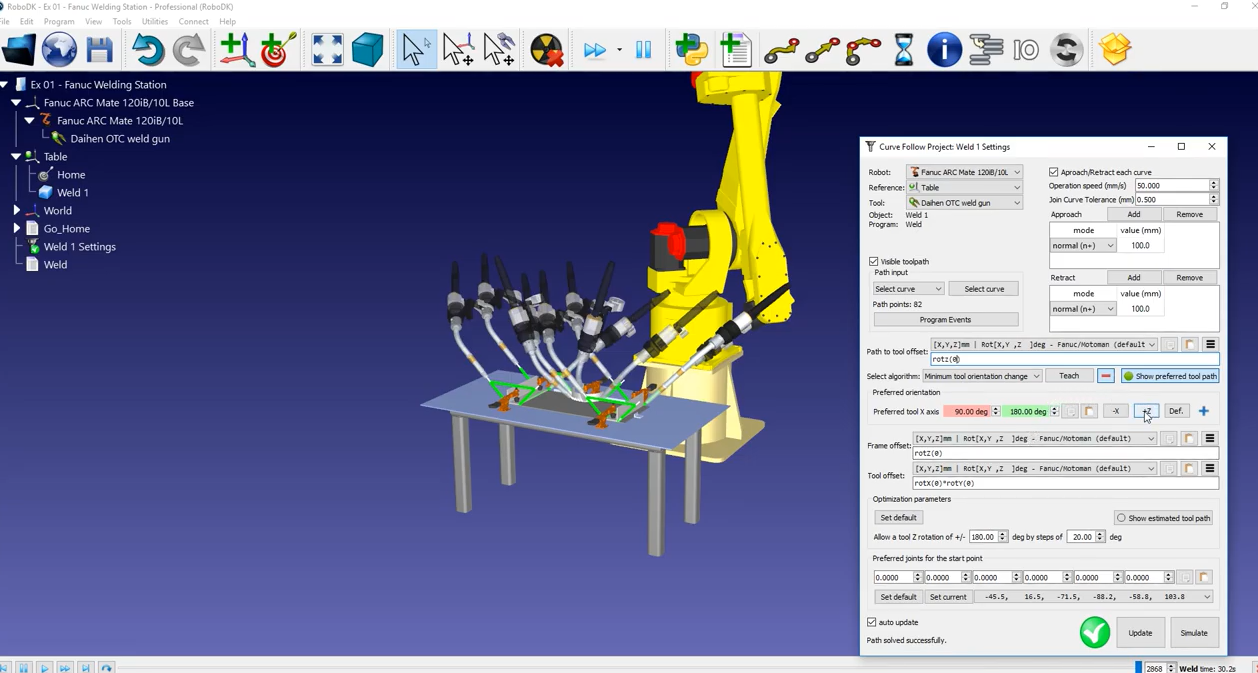
Los movimientos de aproximación y retracción son especialmente importantes para evitar colisiones entre la herramienta y la pieza. El proyecto de seguimiento de curvas crea automáticamente una aproximación y una retracción para cada trayectoria de soldadura. Por defecto, estos movimientos tienen una longitud de 100 mm y son normales a la trayectoria de soldadura.
Para evitar cualquier colisión, puede modificarlos para que midan 200 mm y mantengan la misma orientación.
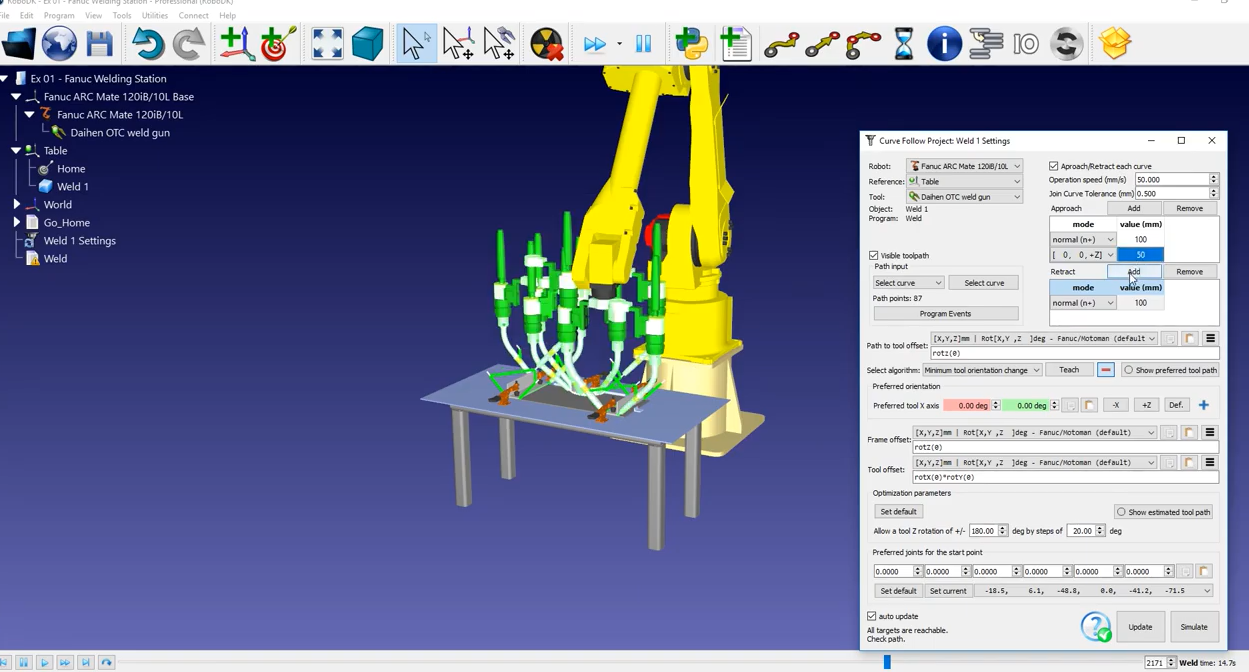
Como alternativa, puede añadir un movimiento de aproximación adicional a lo largo del eje Z del sistema de coordenadas:
1.Vuelva a colocar la aproximación normal por defecto de 100 mm.
2.Añada un movimiento, por ejemplo, a lo largo de la Z.
3.Ajústelo a 50 mm.
4.Pulse Actualizar y Simular cuando haya terminado.
5.Ahora el robot se retrae normal a la trayectoria de soldadura y luego recto hacia arriba.