Alinear objeto con referencia
Esta sección explica cómo el sistema de referencia de un objeto se puede alinear con respecto a su propia geometría. Esta sección permite reemplazar el sistema de referencia de un objeto a una ubicación que se puede identificar en una configuración real.
Siga estos pasos para alinear virtualmente el sistema de referencia de un objeto según puntos específicos de la geometría del objeto:
1.Cargaueel objeto
2.Seleccione la Estación activa
3.Seleccione Programa➔
Asegúrese que el sistema de referencia esté directamente adjunto a la raíz de la estación (no a otros Sistemas de Referencia).
4.Haga clic derecho en el sistema de referencia y seleccione 
El procedimiento es muy similar a la sección anterior. La diferencia principal es que debemos seleccionar los puntos del objeto virtual en lugar de los del objeto real.
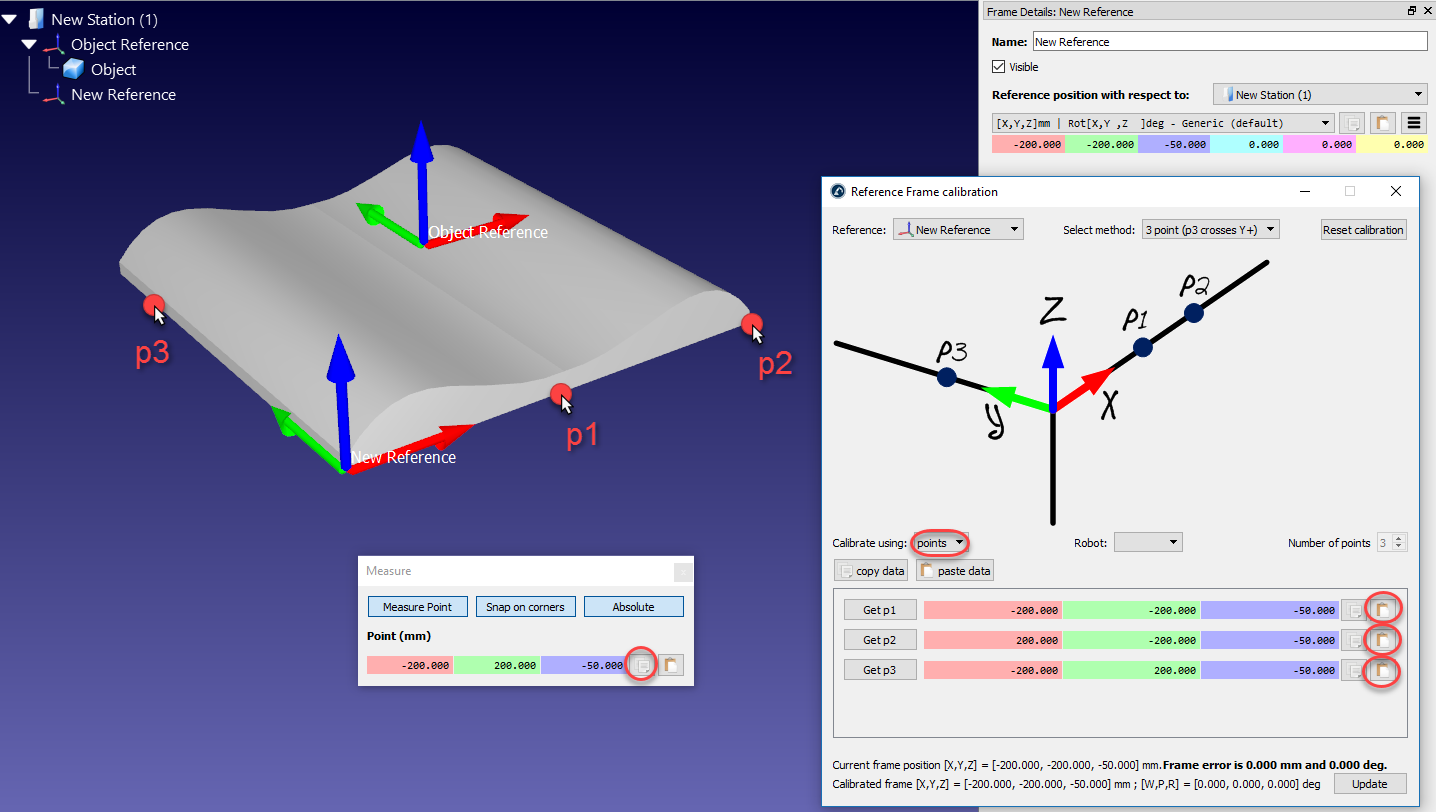
5.Seleccione el método de calibración deseado.
Por ejemplo: el método de 3 puntos (con el 3er punto cruzando el eje Y +).
6.Seleccione Calibrar usando puntos
7.Seleccione Herramientas➔Medida para abrir la Herramienta de Medición
8.Seleccione el botón Absoluto en la Herramienta de Medición para que los puntos se midan con respecto a la estación (referencia absoluta)
9.Seleccione los 3 puntos en el objeto virtual (uno por uno) e introdúzcalos en la ventana de calibración del sistema de referencia
10.Seleccione Actualizar. El sistema de referencia debe aparecer en la ubicación deseada.
11.Haga clic derecho en el objeto y seleccione Cambiar Soporte. Luego seleccione el nuevo sistema de referencia. La posición absoluta del objeto no se cambiará. Sin embargo, la posición relativa del objeto con respecto al nuevo sistema de referencia será definida correctamente.
12.El objeto y su propia referencia están listos para la programación fuera de línea: Arrastre y suelte el nuevo sistema de referencia para el sistema de referencia del robot.