Alinear referencias del robot
Esta sección explica cómo se pueden programar dos o más robots fuera de línea mientras se comparte un sistema de referencia común.
En una aplicación de programación fuera de línea típica, la posición del objeto se actualiza con respecto al robot. Sin embargo, cuando se utilizan dos o más robots para la misma aplicación, la posición de cada robot debe actualizarse con respecto a una referencia común (un objeto de referencia o un sistema de referencia común).
Siga estos pasos para actualizar la posición de dos o más robots con respecto a un sistema de referencia:
1.Asegúrese de que los sistemas de referencia del robot y la referencia del objeto no dependan uno del otro. Si hay una dependencia, debemos colocar los sistemas de referencia adjuntos al elemento de la estación.
2.Agregue un nuevo sistema de referencia adjuntado a cada uno de los sistemas base del robot como si se fuera a definir un nuevo sistema de referencia individual para cada robot (Ref. A Real y Ref. B Real).
Este sistema de referencia representará la ubicación real de la pieza con respecto a cada robot.
3.Calibre cada uno de estos sistemas de referencia (Ref. A Real y Ref. B Real) Por separado, utilizando el Procedimiento de calibración de referencia estándar (método de 3 puntos, por ejemplo)
En este punto veremos 3 sistemas de referencia que deben ser coincidentes, pero no lo son. El sistema de referencia de cada robot debe ser actualizado para solucionar este problema:
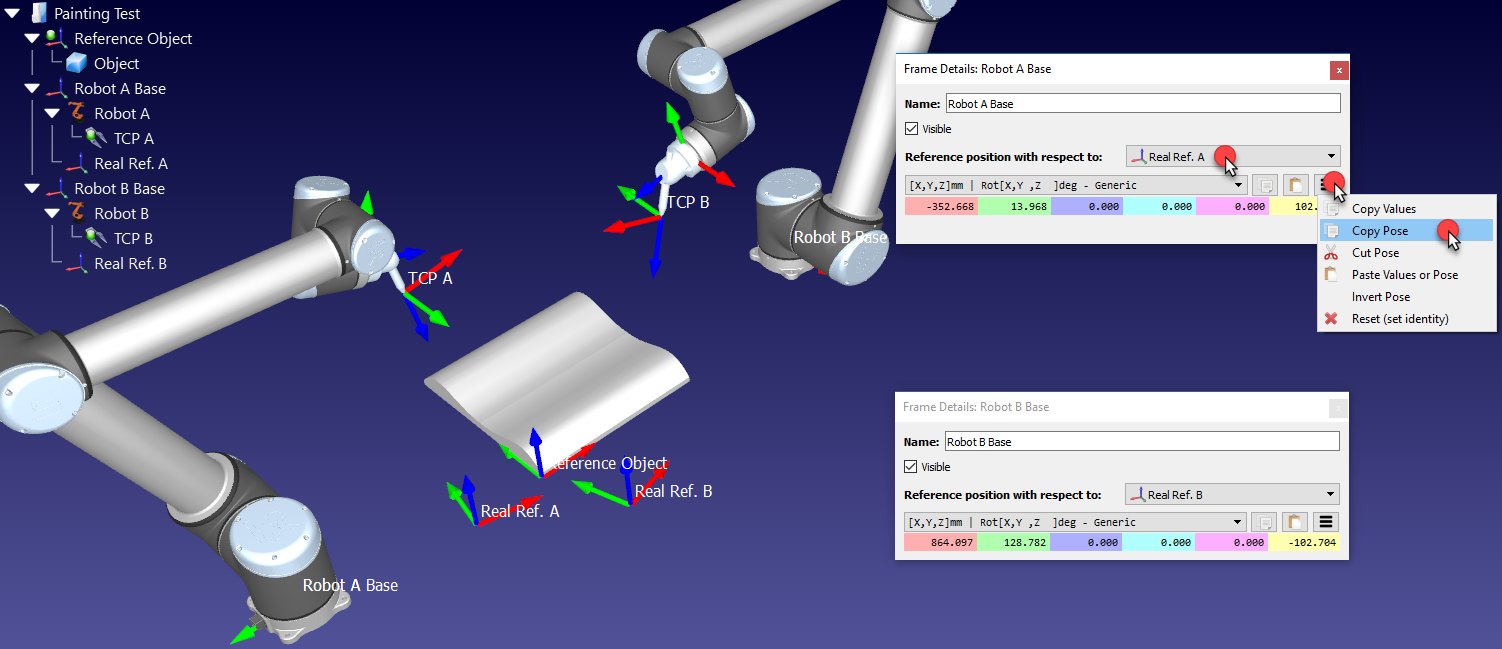
4.Haga doble clic en una de las referencias del robot, como Base Robot A para abrir la ventana sistema de referencia
5.Copiar la posición de la referencia del robot base con respecto a la referencia calibrada del robot (Ref. A Real), seleccionando el botón copiar
6.En la misma ventana, cambiar la Posición de referencia con respecto a (Desplegable) Para el Objeto de Referencia
7.Pegar la posición copiada. El robot se moverá y la Ref. A Real será coincidente con el sistema de Objeto de Referencia
8.Repetir los pasos 4-7 de este procedimiento para los otros robots, si los hay
Al final de este procedimiento, todos los sistemas de referencia deben coincidir y la relación entre todas las referencias calibradas y el Objeto de referencia debe ser el mismo.