El Punto Central de la Herramienta Robot (o TCP) es el punto utilizado para el posicionamiento de robots en cualquier programa de robots que implique objetivos definidos en el espacio cartesiano. El TCP se define como una transformación desde la brida de montaje del robot. Definir el TCP correcto es importante en cualquier aplicación de robots, ya sea que implique programación fuera de línea o no.
Siga estos pasos para calibrar una herramienta del robot (Punto de Centro de Herramienta o TCP):
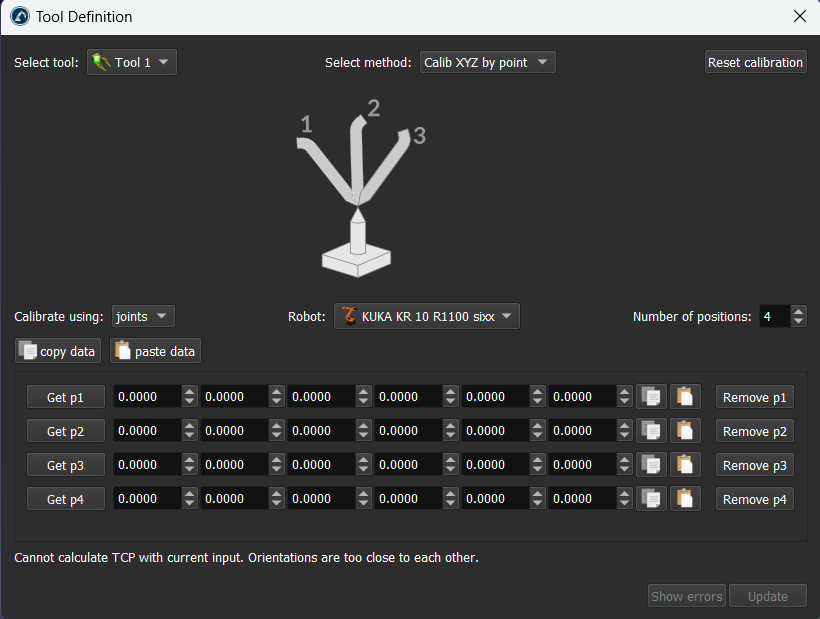
2.Seleccione la Herramienta para calibrar. Alternativamente, haga clic con el botón derecho en una herramienta y seleccione Definir TCP.
3.Seleccione el método:
a.Tocando un punto con la punta del TCP, utilizando diferentes orientaciones de herramientas (Calibrar XYZ por punto)
b.Tocar un plano con el TCP, utilizando diferentes orientaciones de herramientas (Calibrar XYZ por plano). El TCP puede ser un punto o una esfera.
Nota: Tocando el mismo punto usando diferentes orientaciones (primer método) es el mismo método que la mayoría de los controladores de robots tienen disponibles en el teach pendant. Utilice RoboDK para obtener una mejor idea de los errores del TCP.
Nota: Si es necesario calcular el centro de una esfera, se recomienda utilizar un plano para calibrar el TCP. Este método recupera automáticamente el centro de la sonda táctil.
4.La calibración del TCP mediante valores de articulación es la configuración predeterminada. Cambie las poses si usted tiene los objetivos cartesianos.
Importante: Si el TCP está calibrado usando Poses, la posición de la brida de montaje del robot debe ser proporcionada como una Pose (posición y orientación), con respecto a la base del robot o a un sistema de referencia. Más información sobre cómo proporcionar estos valores en la sección Sistemas de referencia.
Consejo: Es posible utilizar más de 3 ó 4 configuraciones para calibrar el TCP. Esto permite obtener un resultado más preciso y proporciona una buena estimación del error TCP. Es recomendado utilizar 8 puntos o más para definir un TCP con precisión, o 3 puntos si la precisión no es importante.
5.Seleccione el robot si hay más de un robot disponible.
6.Ajuste el número de puntos que desea utilizar para calibrar el TCP. Este valor también puede ser modificado posteriormente.
7.Empezar llenando la tabla con las configuraciones medidas (valores de articulación o posición y orientación de la brida de montaje).
Consejo: La lista de configuraciones se puede rellenar manualmente o usando los botones copiar/pegar (a la derecha de cada línea).
Importante: Se recomienda proporcionar cada valor de articulación con al menos 4 decimales (al proporcionar valores de articulación). El número permitido de valores decimales se puede cambiar en Herramientas➔Opciones➔Precisión➔Decimales máximos.
Consejo: También es posible seleccionar Obtener p1 para obtener los valores comunes actuales del robot real a RoboDK. Si el controlador del robot se ha ajustado puede obtener correctamente fácilmente esta posición en el PC. Más información disponible en la sección Controladores de Robot.
Importante: Es recomendado mantener una copia separada de los valores que se proporcionan. Seleccione Copiar datos y Pegar datos para copiar/pegar todo el contenido.
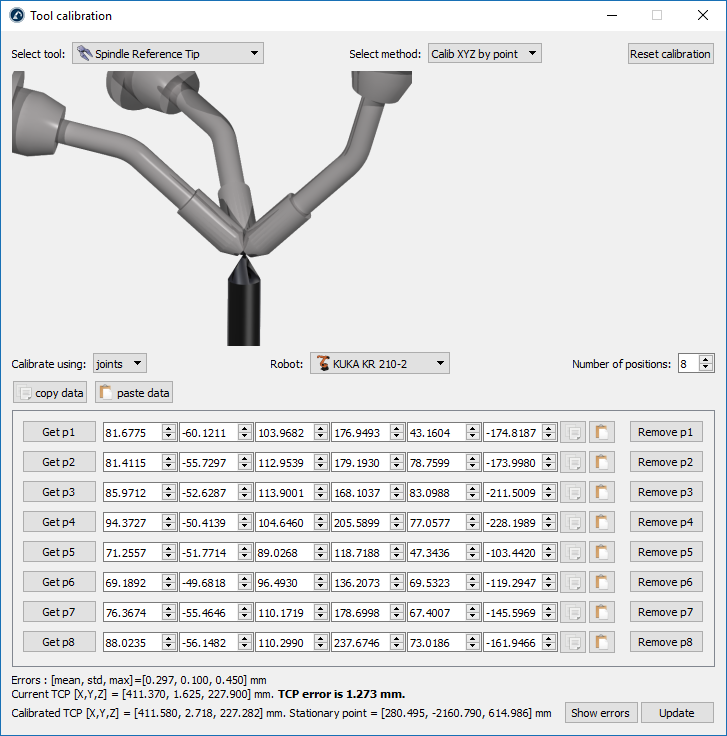
8.Finalmente, seleccione Actualización para actualizar el TCP en la estación de RoboDK. El error TCP se actualizará a 0 mm.
Nota: El TCP calibrado se calcula automáticamente una vez introducidos los valores.
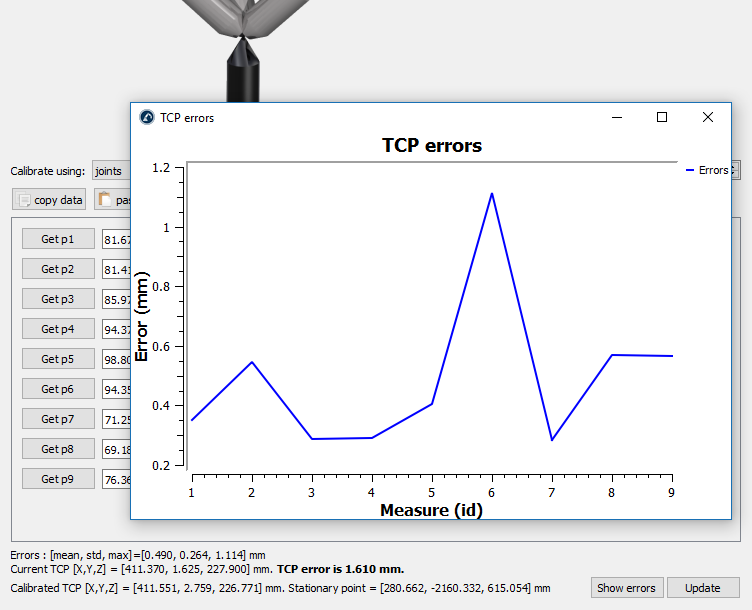
Consejo: Algunas estadísticas de error útiles se proporcionan como el error medio, desviación estándar (std) y error máximo. Seleccione Mostrar errores para mostrar un gráfico con los errores de cada punto contra el promedio calculado. Dado que este método implica una gran cantidad de operaciones manuales, es común introducir errores en puntos concretos. Para aislar estos errores, podemos borrar iterativamente los puntos que muestra un error más grande en comparación con el promedio.
Como ejemplo, la siguiente imagen muestra los errores antes de que el punto 6 se elimine seleccionando el botón Eliminar p6.