Sincronizar ejes externos
Es posible sincronizar un brazo robot con ejes externos. Los ejes externos se pueden utilizar simplemente como posicionador o también pueden sincronizarse con el mismo controlador de robot. Cuando se sincronizan los ejes externos, el robot y los ejes pueden moverse al mismo tiempo manteniendo movimientos lineales precisos en relación con la ruta programada. No todos los controladores de robots soportan la sincronización del brazo del robot con ejes externos.
Para sincronizar un brazo robot con ejes externos:
1.Construya una estación RoboDK colocando el robot y los ejes/mecanismos en su ubicación
2.Seleccione Utilidades➔Sincronizar Ejes Externos
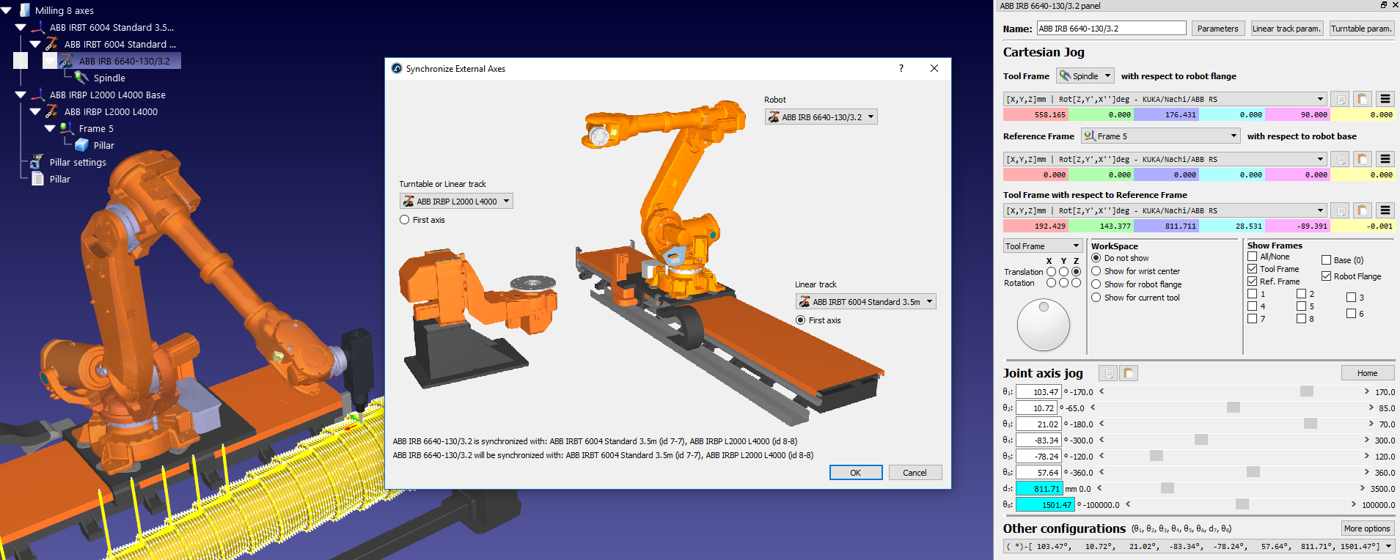
3.Seleccione el robot y la mesa giratoriae y/o pista lineal estarán disponible para sincronizar con el robot
4.Seleccione OK. Un nuevo panel de robots se abrirá mostrando los ejes adicionales en azul
Los objetivos relacionados con este robot sincronizado mostrarán valores de articulación adicionales en azul. Es posible especificar la posición preferida de un posicionador cuando se genera un programa. Las posiciones cartesianas mantendrán la posición cartesiana proporcionada mientras se mueven los ejes externos a lo largo de la ruta.
Cualquier configuración de mecanizado de robots mostrará opciones adicionales para proporcionar la posición preferida de los ejes externos. Además, cada movimiento exportado a través del post-procesador incluirá la posición de los ejes externos.