Añadir un Programa de Retracción
Puede crear fácilmente un nuevo programa que retraiga de forma segura el robot de la pieza a una posición segura.
Similar a las operaciones anteriores:
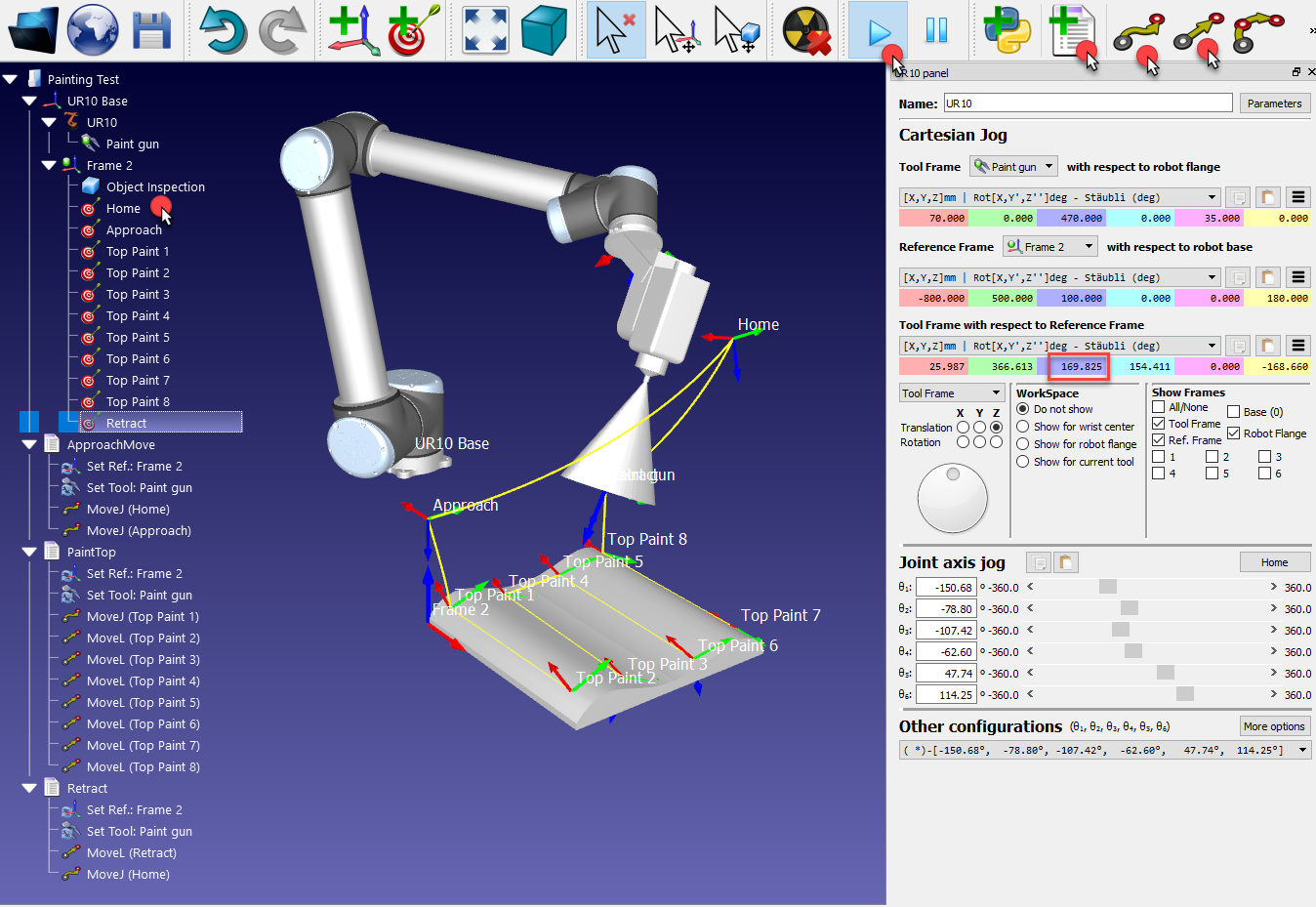
1.Con el robot colocado en el último objetivo, mueva el robot hacia arriba incrementando la coordenada Z del TCP con respecto al sistema de referencia en el panel del robot (caso destacado en la siguiente imagen)
2.Seleccione Programa➔
3.Seleccione Programa➔

4.Seleccione la posición Inicio
5.Seleccione Programa➔
Simule cada programa individualmente haciendo doble clic en él. La simulación se puede acelerar sosteniendo la tecla barra espaciadora o seleccionando el botón de simulación rápida