Añadir un Programa de Aproximación
Puede crear fácilmente un nuevo programa que acerque el robot a la pieza de forma segura.
Siga estos pasos para crear un programa que se mueva de la posición de Inicio a la de Aproximación del objetivo:
1.Seleccione Programa➔
2.Renombre el programa como MoverAproximacion
3.Seleccione la posición de Inicio
4.Seleccione Programa➔
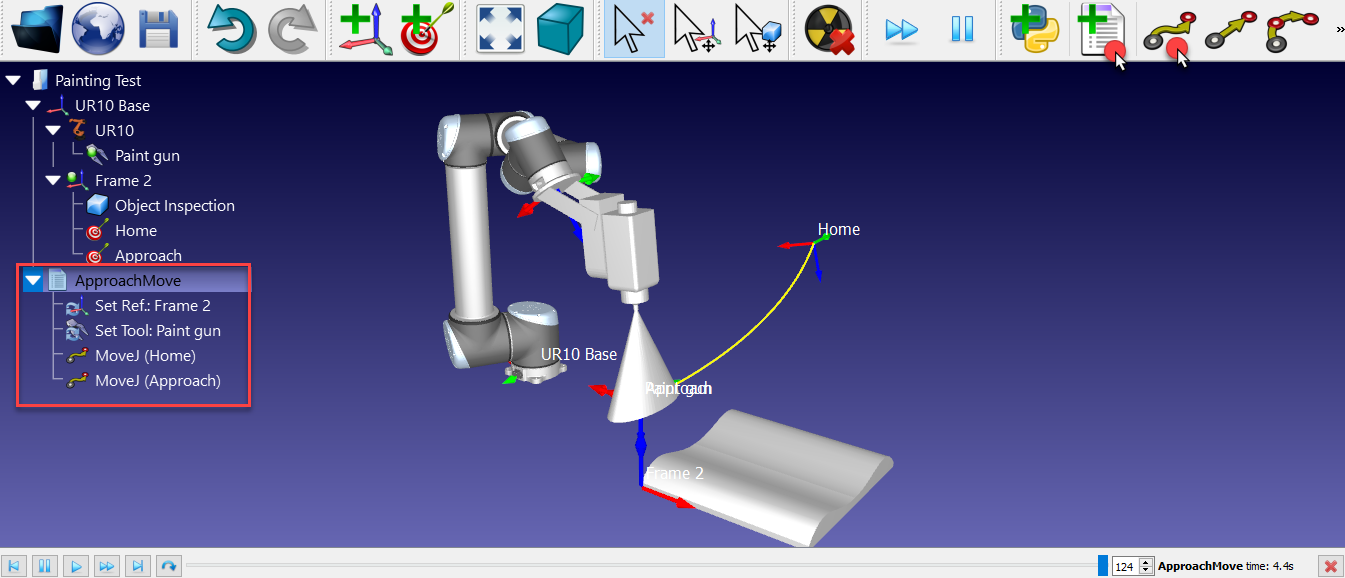
Dos instrucciones serán añadidas automáticamente para decirle al robot qué sistema de herramienta y sistemas de referencia estamos usando
5.Seleccione la Aproximación del destino
6.Seleccione el Programa➔
Haga doble clic en el programa MoverAproximacion y se ejecutará la simulación del programa. La barra de simulación y se mostrará un tiempo de ciclo estimado.