Crear una Herramienta (TCP)
Se pueden cargar o crear nuevas herramientas de robot (TCP) en RoboDK a partir de geometría 3D previamente cargada.
Siga estos pasos para cargar un objeto y configurarlo como una herramienta de robot:
1.Seleccione Archivo➔
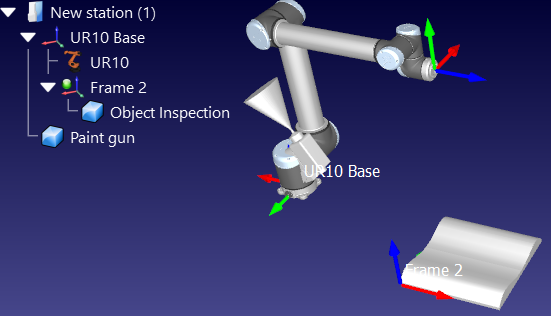
2.Seleccione el archivo Paint gun.stl para añadirlo como un objeto (se añadirá en el sistema base del robot)
3.Arrastre y suelte el objeto al elemento del robot dentro del árbol de la estación como se muestra en la siguiente imagen
Las herramientas se pueden cargar o guardar con el formato .tool.
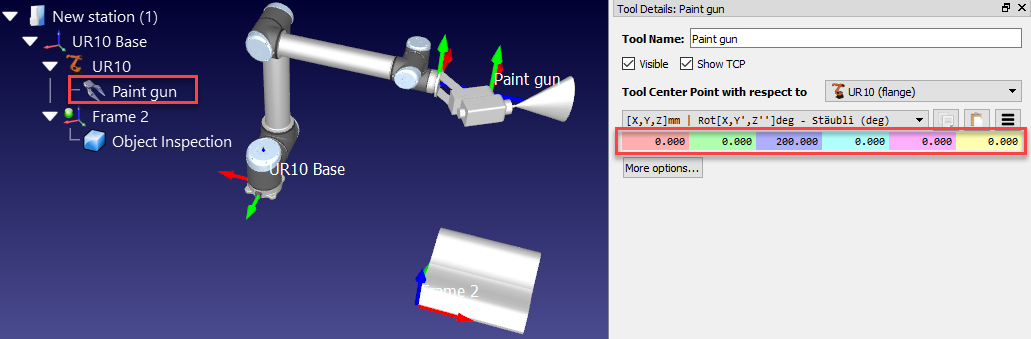
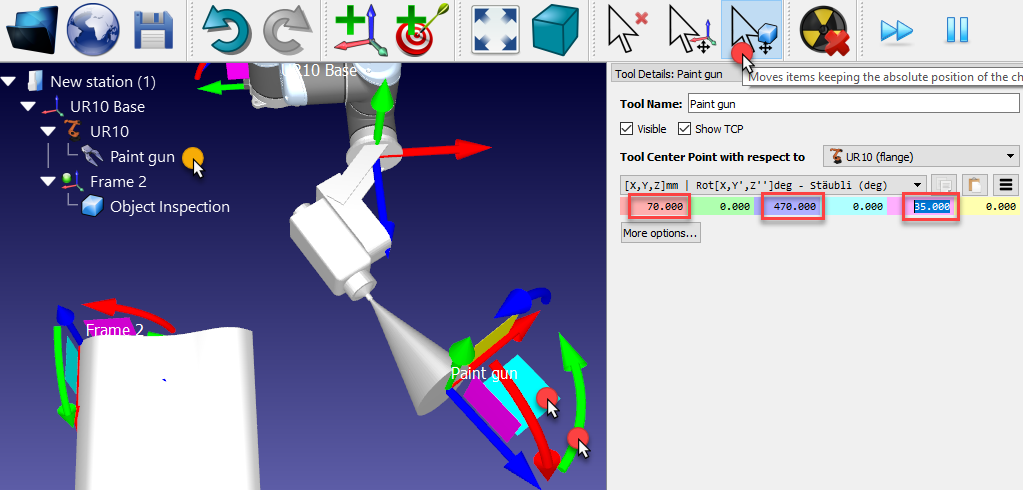
De forma predeterminada, RoboDK definirá el centro de la herramienta (TCP, o Tool Center Point) en la posición [X, Y, Z] = [0, 0, 200] mm. Esta posición se puede cambiar introduciendo las coordenadas manualmente y/o moviendo el TCP manteniendo presionada la tecla Alt+Mayús como se muestra en la siguiente imagen:
1.Mantenga Alt + Mayús o seleccione el botón mostrado en la barra de herramientas
2.Seleccione el plano azul claro (plano XZ del TCP) y arrastre el TCP aproximadamente hacia la superficie de la pistola pulverizadora, como se muestra en la siguiente imagen
3.Seleccione la flecha redondeada verde (rotación alrededor del eje Y) para que el eje Z apunte hacia fuera
4.Una vez obtenida una estimación de las coordenadas es posible retocar estos valores manualmente haciendo doble clic en el objeto Paint gun (pistola de pintura). La rueda del ratón se puede utilizar en la parte superior de cada casilla para actualizar rápidamente la posición en la pantalla principal.
En este punto podemos guardar la estación:
1.Seleccione Archivo➔
2.Guardar el archivo como Test de Pintura.rdk. El título de la ventana y el nombre de la estación se actualizarán
Establecer un TCP relativo
Puede posicionar una herramienta (TCP) con respecto a otra, por ejemplo, para definir un punto de separación determinado o para colocar un cortador con respecto a una referencia o portaherramientas.
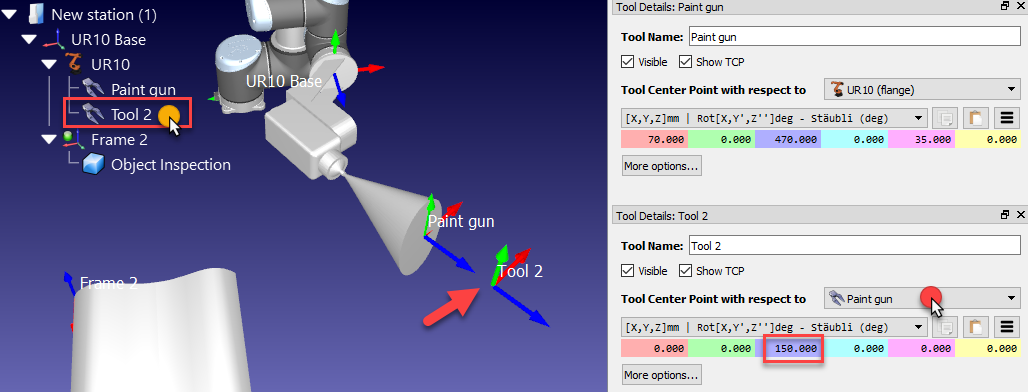
Estos pasos suponen que se debe agregar un segundo TCP con respecto al primero a 150 mm a lo largo del eje Z:
1.Haga clic derecho en el robot
2.Seleccione 
3.Haga doble clic en este nuevo TCP
4.Seleccione TCP con respecto a ➔Paint gun
5.Introduzca la coordenada Z a 150 mm y coloque las otras traslaciones y rotaciones a 0.
Este nuevo TCP relativo al TCP previamente definido se eliminará en las secciones siguientes de esta demostración.
Mover la geometría de la herramienta
Es posible que la geometría de la herramienta no esté alineada correctamente con respecto a la brida de montaje del robot (sistema de referencia del adaptador) cuando se carga en RoboDK.
Los siguientes pasos asumen que se cometió un error y la herramienta se montó 180 grados alrededor del eje Z, por lo que se debería aplicar la siguiente corrección:
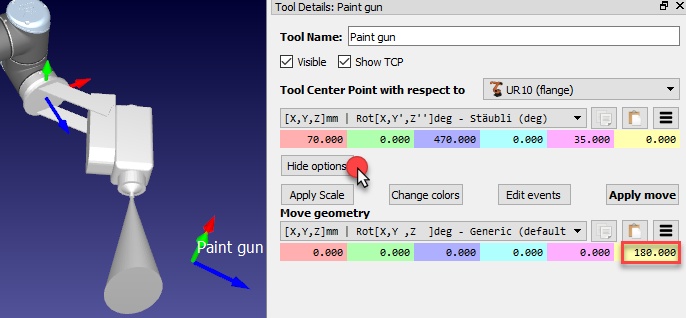
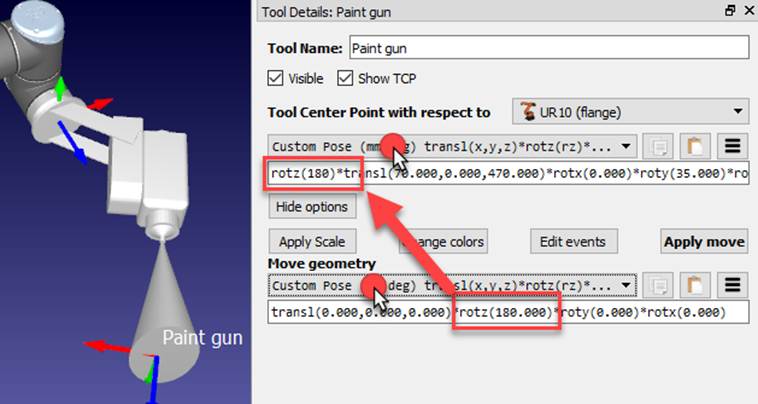
1.Seleccione Más opciones en la ventana detalles de la herramienta
2.Introduzca 180 en la casilla amarilla (rotación Z) de la geometría de la pistola de pintura, como se muestra en la siguiente imagen. La rueda del ratón se puede utilizar en la parte superior de cada caja para actualizar rápidamente la posición en la pantalla principal.