Crear Objetivos
Las posiciones del robot se registran/representan como Objetivos. Un objetivo cartesiano define la posición de la herramienta con respecto a un sistema de coordenadas. Un objetivo de articulación define la posición del robot dados los valores de articulación del robot.
Siga estos pasos para crear dos objetivos como un nuevo objetivo de inicio y un objetivo de aproximación, respectivamente:
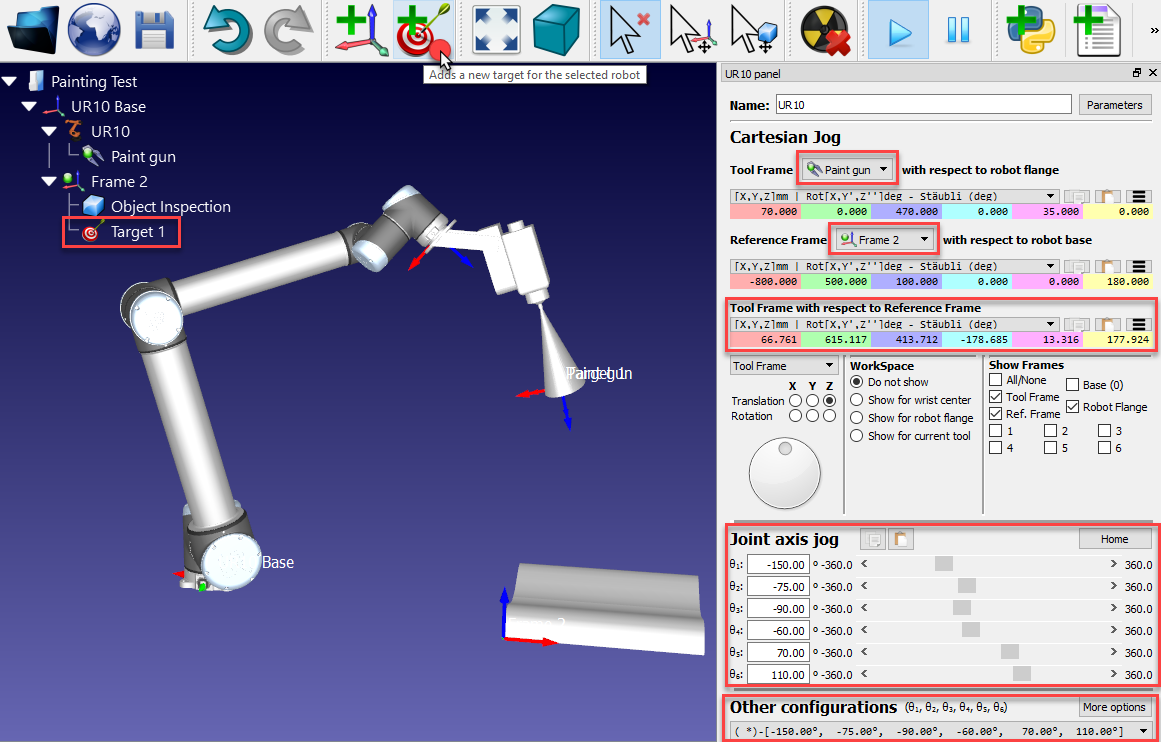
1.Haga doble clic en el robot para mostrar el panel del robot
2.Seleccione la pistola de pintura como sistema de herramienta. Una vez que una herramienta o un sistema de referencia se activa, se mostrará un punto verde en el icono.
3.Seleccione la Referencia 2 como sistema de referencia
4.Sostenga la tecla Alt y mueva el robot arrastrándolo a través del TCP o la brida de montaje del robot a una posición segura, libre de colisiones con cualquier objeto. Alternativamente, mueva la herramienta (TCP) con respecto al sistema de referencia.
5.Use la sección Otras configuraciones para cambiar a una configuración del robot diferente y asegurarse de que ninguno de los ejes del robot está cerca de límites de eje.
6.Seleccione Programa➔
En este ejemplo, los ejes del robot usados para el primer objetivo son: [-150,-75,-90,-60, 70, 110] grados. Estos valores se pueden copiar de este texto y pegar 
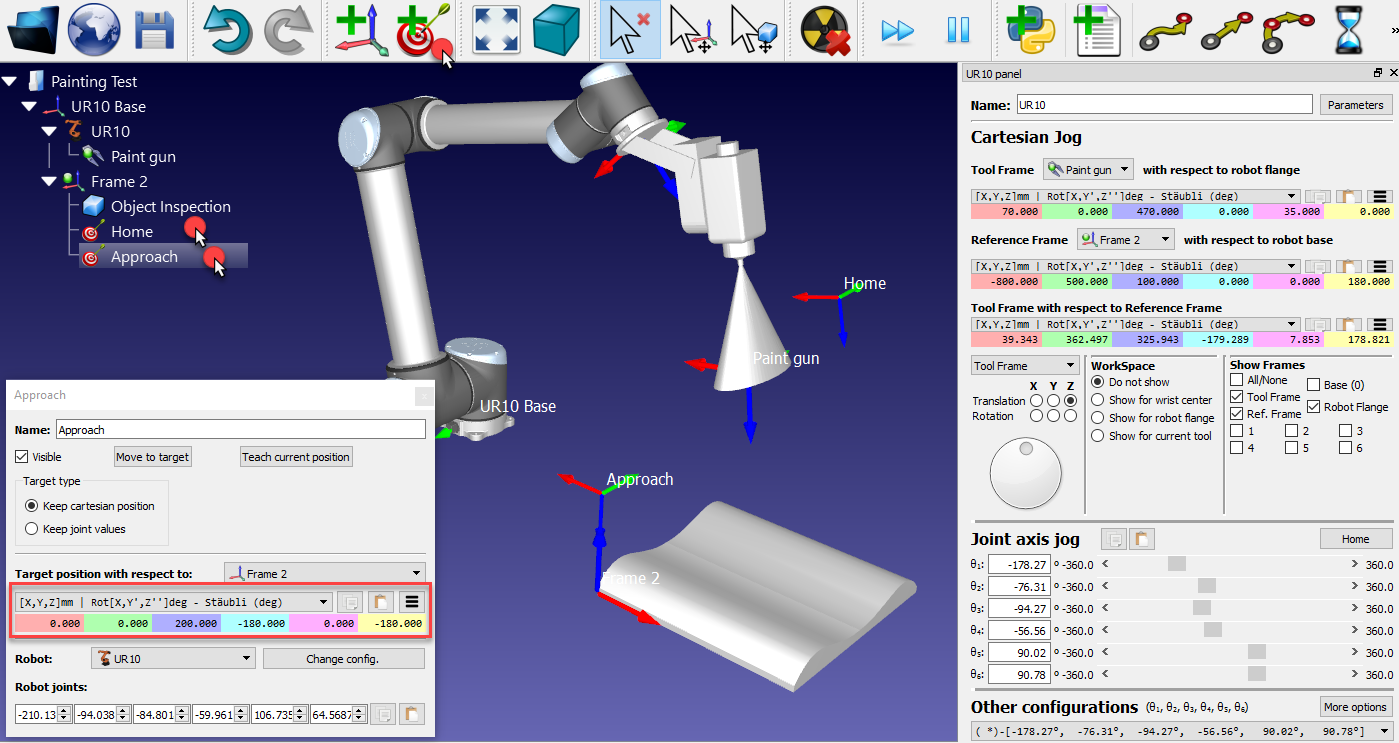
7.Renombre del primer objetivo como Inicio presionando F2. Alternativamente, seleccione Herramientas➔Renombrar elemento….
8.Mueva el robot a un borde de la pieza (arrastrando la herramienta mediante la tecla Alt, introduciendo coordenadas o moviendo los ejes manualmente)
En este ejemplo usamos las siguientes coordenadas de articulación del robot [0, 0, 200, 180, 0, 180] grados.
9.Seleccione Programa➔
10.Cambie el nombre del destino a Aproximación como se muestra en el paso 7
11.Seleccione el objetivo de inicio y el objetivo de aproximación alternativamente para ver el robot moverse entre los dos objetivos
12.Haga clic derecho en el objetivo y seleccione Enseñar Posición Actual (Alt+doble clic), si es necesario, para registrar una posición diferente
13.Haga clic derecho en el objetivo y seleccione
Si es necesario, proporcione valores diferentes para definir los objetivos.