Crear un Sistema de Coordenadas
Un sistema de coordenadas o referencia permite el posicionamiento de objetos con respecto a un robot o con respecto a otros objetos o referencias en el espacio 3D (incluyendo la posición y orientación).
Para añadir un nuevo sistema de referencia:
1.Seleccione Programa➔
Alternativamente, seleccione el botón equivalente en la barra de herramientas.
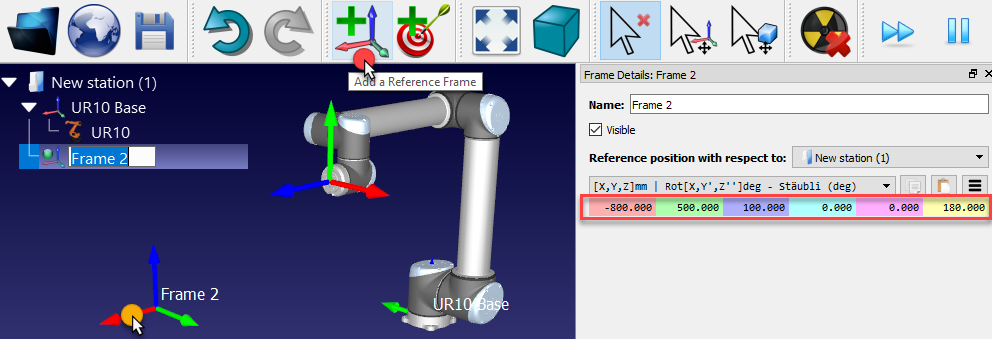
2.Haga doble clic en el sistema de referencia (en el árbol o en la geometría 3D de la estación) para introducir las coordenadas mostradas en la siguiente imagen (posición X, Y, Z y ángulos de Euler para la orientación). La rueda del ratón se puede utilizar en la parte superior de cada casilla para actualizar rápidamente la posición del sistema de referencia en la pantalla principal.
Se utilizan los siguientes colores por defecto:
●Coordenada X ➔ Rojo
●Coordenada Y ➔ Verde
●Coordenada Z ➔ Azul
●Primera Rotación de Euler ➔ Cian
●Segunda Rotación de Euler ➔ Magenta
●Tercera Rotación de Euler ➔ Amarillo
3.Seleccione Vista➔Agrandar Sistemas de Coordenadas (+) para aumentar el tamaño de los sistemas de referencia
4.Seleccione Vista➔Reducir Sistemas de Coordenadas (-) para reducir el tamaño de los sistemas de referencia
5.Seleccione Vista➔Mostrar/Ocultar texto en pantalla (/) para mostrar u ocultar el texto en la pantalla
6.Opcionalmente, cambie el nombre de cualquier sistema de referencia u objeto en el árbol seleccionando F2
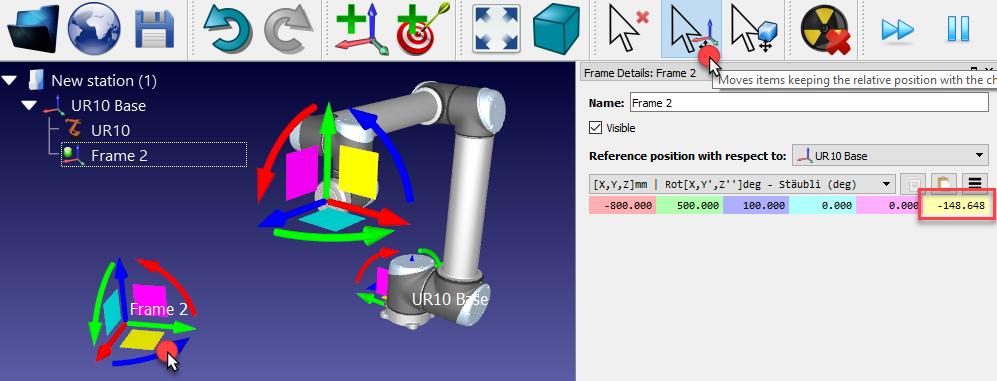
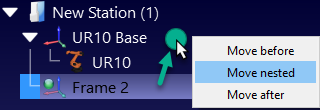
Si se usa más de un sistema de referencia, es posible arrastrarlos y colocarlos dentro del Árbol de la estación para que coincidan con la dependencia que existe en la configuración real. Por ejemplo, el sistema de referencia 2 podría ser colocado con respecto a la referencia base del robot. En este caso, si se mueve la referencia base del UR10, el sistema 2 también se mueve con él. Es importante tomar esto en cuenta si se usan otros robots o sistemas de referencia dentro del mismo proyecto. La siguiente imagen muestra la diferencia en la dependencia.
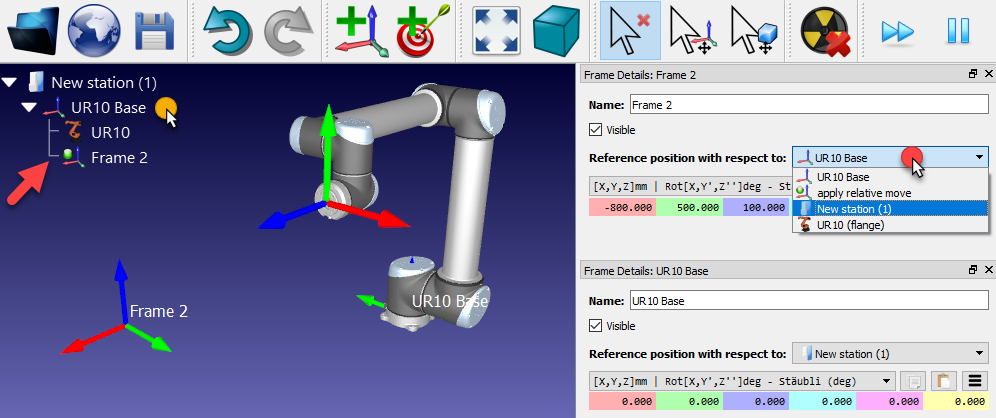
Incluso si la dependencia es diferente, también es posible introducir o recuperar las coordenadas de cualquier sistema de referencia con respecto a cualquier otro sistema de referencia, como se muestra en la siguiente imagen. La mayoría de los controladores de robots requieren las coordenadas del sistema de referencia con respecto al sistema base del robot.
Los sistemas de referencia también se pueden mover en la pantalla principal sosteniendo la tecla Alt, o seleccionando el botón correspondiente en la barra de herramientas