Generar Programa para el Robot
Una vez que tenga la simulación lista en RoboDK, puede generar fácilmente el programa del robot para que pueda ejecutar el programa en el controlador del robot sin tener que escribir una sola línea de código.
Puede exportar cualquier programa individualmente o el programa principal incluyendo los subprogramas:
Es posible exportar cualquier programa individualmente o el programa principal incluyendo los subprogramas:
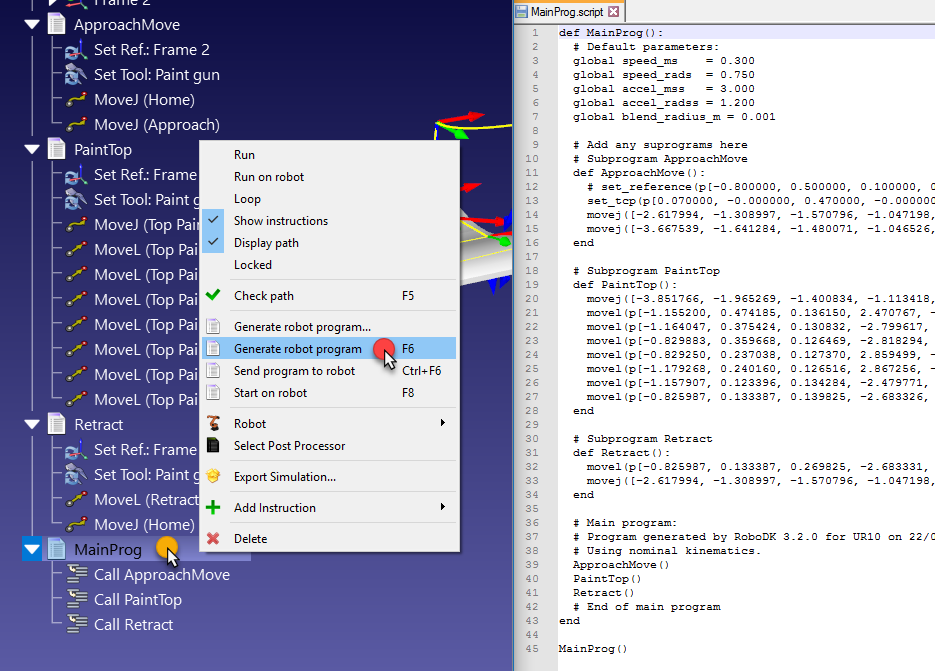
1.Haga clic derecho en un programa (MainProg por ejemplo).
2.Seleccione Generar Programa (F6).
Alternativamente, seleccione Generar Programa... para especificar la ubicación para guardar el archivo.
3.El SCRIPT del programa para tu robot UR se mostrará en un editor de texto.
Este archivo es el resultado de generar el programa fuera de línea. El archivo se puede enviar al controlador del robot para ejecutar los mismos movimientos que se simularon en RoboDK.
Nota. Si está utilizando un robot UR, puede cambiar el postprocesador para generar archivos URP legibles por el controlador del robot. Visite las siguientes secciones para obtener más información sobre la diferencia entre los programas SCRIPT y URP: Inicie un programa SCRIPT con un Controlador de robot Universal y Cómo generar y modificar un programa URP para un controlador de Robot Universal.
●Seleccione Enviar programa al robot (Ctrl+F6) para enviar el programa a través del FTP (programación fuera de línea)
●Active la opción Ejecutar en el Robot para ejecutar el programa paso a paso cada vez que ejecutamos el programa (programación en línea). Esto permite ejecutar el programa directamente en el robot y ver la simulación al mismo tiempo. Se necesitan los controladores del robot la programación en línea.
Es posible cambiar el post-procesador para los robots UR y personalizar la forma en que se genera un programa:
1.Haga clic derecho en un programa o un robot
2.Seleccione 
3.Seleccione Universal Robots URP
Genere el programa de nuevo. En este ejemplo, el post-procesador predeterminado utiliza valores de articulaciones para definir cada movimiento lineal y el segundo post-procesador utiliza coordenadas cartesianas para definir cada movimiento lineal.