Mover la geometría de la herramienta
Es posible que la geometría de la herramienta no esté alineada correctamente con respecto a la brida de montaje del robot (sistema de referencia del adaptador) cuando se carga en RoboDK.
Los siguientes pasos asumen que se cometió un error y la herramienta se montó 180 grados alrededor del eje Z, por lo que se debería aplicar la siguiente corrección:
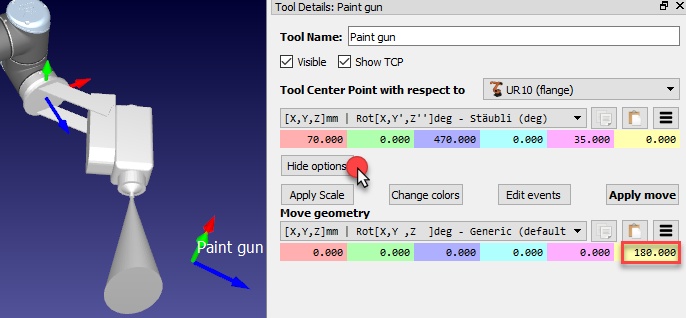
1.Seleccione Más opciones en la ventana detalles de la herramienta
2.Introduzca 180 en la casilla amarilla (rotación Z) de la geometría de la pistola de pintura, como se muestra en la siguiente imagen. La rueda del ratón se puede utilizar en la parte superior de cada caja para actualizar rápidamente la posición en la pantalla principal.
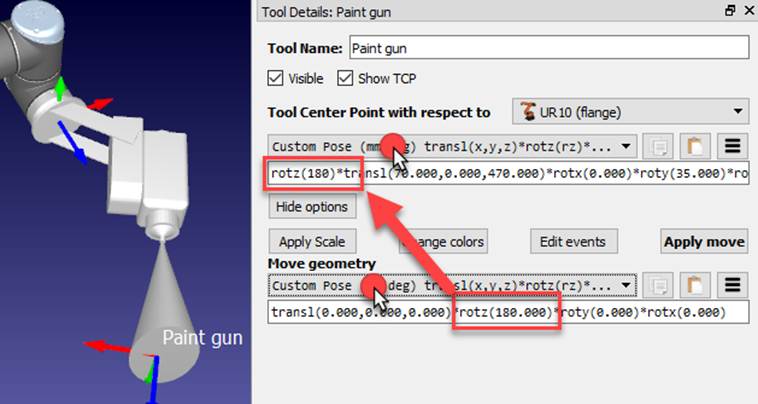
Consejo: Si el TCP se definió antes de esta operación, el TCP ya no concuerda con la geometría. Para actualizar la posición del TCP en la ubicación correcta podríamos seguir los pasos descritos al principio de esta sección (manteniendo pulsada la tecla Alt o introduciendo los valores manualmente). Alternativamente, podríamos girar el TCP alrededor de la brida de montaje del robot seleccionando el método de representación Script (como se muestra en la siguiente imagen) e inserte la rotación alrededor del eje Z pre-multiplicando la definición del TCP (al principio de la definición de la línea del TCP).
Nota: Más información acerca de cómo proporcionar las transformaciones y poses disponibles en la sección sistemas de referencia.