Configuraciones de robots
Una configuración de robot define un estado específico del robot. Cambiar la configuración requiere cruzar una singularidad. Los controladores de robots no pueden cruzar una singularidad cuando se realiza un movimiento lineal (se requeriría un movimiento de articulación para ello).
En otras palabras, para conseguir un movimiento lineal entre dos objetivos, la configuración del robot debe ser la misma para el movimiento completo, incluyendo el primer y último punto.
Haga clic derecho en un robot y seleccione Cambiar configuración para abrir la ventana de configuraciones del robot. También es posible abrir esta ventana seleccionando Más opciones en el panel del robot.
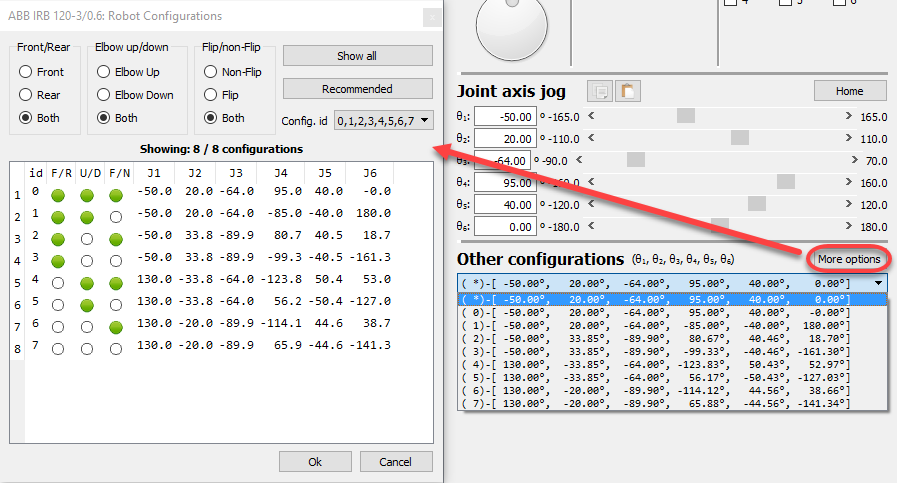
Para un robot estándar de 6 ejes existen típicamente 8 diferentes configuraciones para cualquier posición del robot si asumimos que cada uno de los ejes del robot puede mover una vuelta completa. En la práctica, los límites de las articulaciones pueden ser más o menos limitados en función del robot. Por lo tanto, puede ser posible tener desde 1 a más de 100 diferentes configuraciones de robots para una ubicación específica dependiendo del robot.
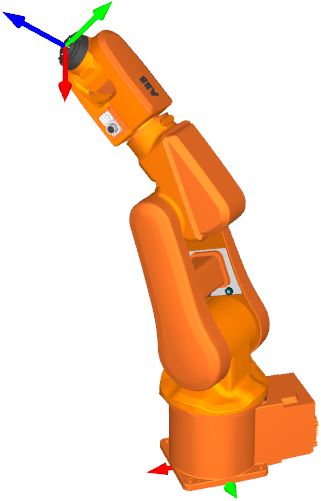
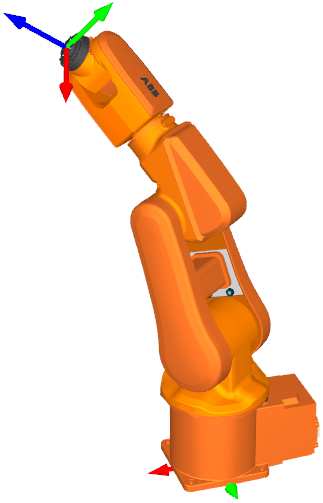
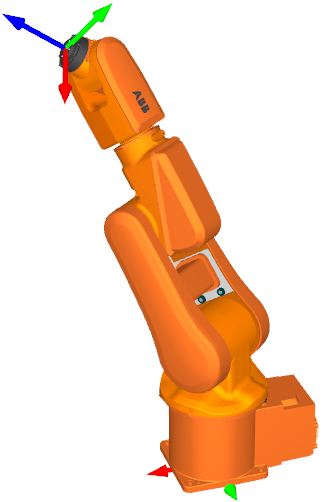
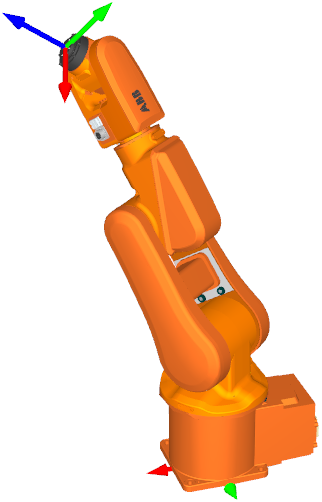
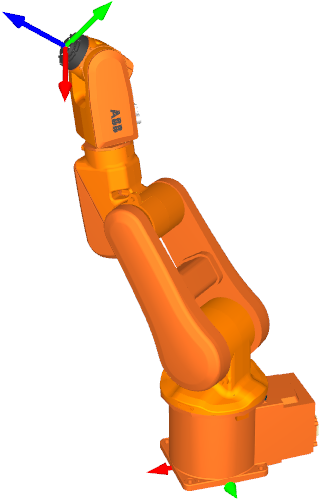
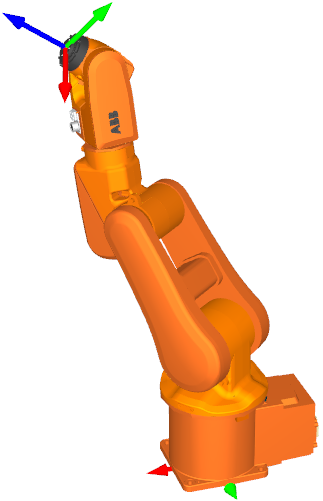
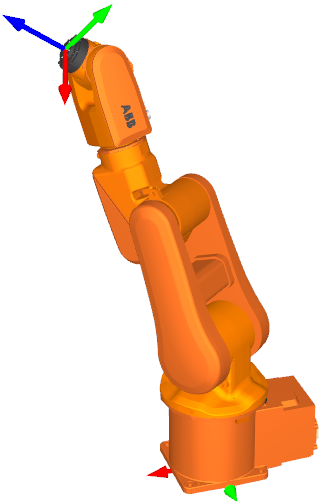
Una configuración de robot define una forma específica (modo de ensamblaje) de alcanzar una posición con el robot. Por ejemplo, el robot puede tener el codo hacia arriba o el codo hacia abajo (hacia arriba o hacia abajo, o U/D), al mismo tiempo que puede apuntar al objetivo o la base puede girar 180 grados para llegar al objetivo hacia atrás (frente vs. trasero, o F/R). Finalmente, la articulación 5 puede voltearse cambiando el signo y al mismo tiempo el eje 4 y el eje 6 compensan ese movimiento (Flip versus No-Flip, o F/N). En total, esto proporciona las configuraciones 2 * 2 * 2 = 8.