Configuración de objetos
Los objetos se pueden importar a RoboDK desde formatos de archivo genéricos como STL, STEP o IGES. Haga doble clic en un objeto del árbol o en la vista 3D para abrir la ventana configuración.
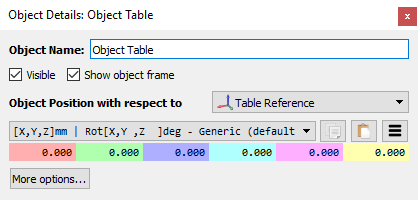
Es posible fijar o ver la posición con respecto a cualquier sistema de referencia. Sin embargo, los objetos se configuran normalmente en sistemas de referencia y se recomienda mover el sistema de referencia si se necesita mover un objeto. Los objetos también pueden ser agarrados por herramientas robóticas después de que ocurran ciertos procesos de simulación.
Consejo: Si desea mover un objeto a una ubicación específica, es mejor colocar el objeto en un sistema de referencia y mover el sistema de referencia en su lugar. Esto ayudará a definir la ubicación del objeto con respecto al robot si planea usar un objeto para crear un nuevo programa de robot (por ejemplo, usando las herramientas de seguimiento de curvas o el objetivo de enseñanza en las herramientas de superficie). Puede arrastrar y soltar un objeto en un sistema de referencia dentro del árbol para especificar esta dependencia.
El menú Más opciones... permite cambiar el color del objeto, aplicar un factor de escala o mover la geometría con respecto a su propio sistema de referencia.
Consejo: Es posible fusionar múltiples objetos en uno mediante la selección de dos o más objetos (manteniendo pulsada la tecla Ctrl), luego, haga clic con el botón derecho y seleccione Combinar.