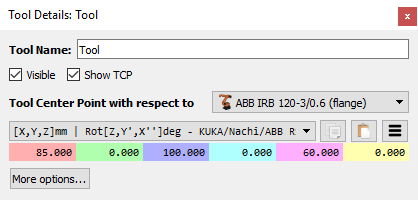
Herramienta del Robot (TCP)
Haga doble clic a Herramienta Robot 
Nota: La pose TCP también se puede modificar desde el Panel del robot.
Seleccionar Más opciones... permite aplicar un factor de escala a la geometría de la herramienta o mover la geometría con respecto a la brida de montaje del robot. Alterar estos valores no tiene impacto en los programas de robots. La geometría se utiliza para los propósitos de la exhibición y la comprobación de la colisión. (manteniendo el TCP intacto).
Consejo: Es posible proporcionar la posición del TCP con respecto a otro TCP seleccionando el TCP de referencia en lugar de la brida de montaje del robot. Por ejemplo, una herramienta de corte se puede definir a una distancia específica a lo largo del eje Z con respecto a otro TCP que represente el elemento de giro. Este ejemplo proporciona más detalles.
Vídeo: El siguiente video proporciona una descripción general de las herramientas de robot (TCP) https://www.youtube.com/watch?v=FltOFBCzx-w&list=PLjiA6TvRACQd8pL0EnE9Djc_SCH7wxxXl&index=11