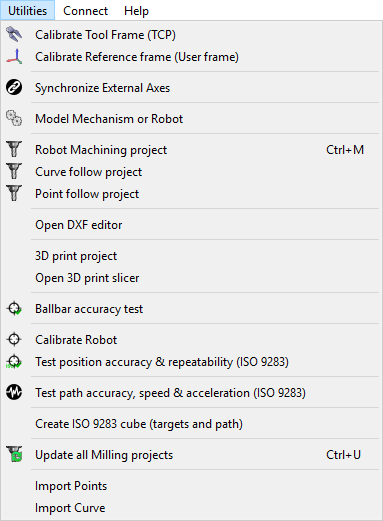
El menú Utilidades permite realizar tareas específicas:
Calibrar Sistema de Herramienta (TCP) permite calibrar un robot TCP al proporcionar datos de la configuración real, como las configuraciones de las articulaciones para llegar a un punto utilizando diferentes orientaciones. Este procedimiento suele estar disponible de la mayoría de los teach pendant de robots. RoboDK permite calibrar un TCP con tantas configuraciones como desee. El uso de más configuraciones permite obtener un valor de TCP más preciso. Obtenga más información sobre la calibración TCP.
Calibrar Sistema de Referencia permite identificar un sistema de referencia con respecto al sistema de referencia base del robot. Esto permite hacer coincidir con precisión la parte de la configuración real con el entorno virtual. Obtenga más información sobre calibración de sistemas de referencia.
Sincronizar Ejes Externos permite configurar uno o más ejes externos y un robot como un mecanismo de robot. Más información disponible en la Sección de ejes externos.
Proyecto de Fresado Robótico puede convertir fácilmente trayectorias de herramienta de máquina a programas de robots. RoboDK puede importar los programas hechos para un CNC de 5 ejes usando el software CAM, tal como código G genérico o archivos APT. Estos programas/trayectorias de herramienta pueden ser fácilmente simulados y convertidos a programas de robots con RoboDK. Más información disponible en esta sección.
El Proyecto de seguir curva es como un proyecto de fresado de robot pero permite seleccionar curvas extraídas de la geometría 3D como trayectorias de herramienta. También es posible seleccionar Importar Curva para importar curvas 3D desde archivos CSV o TXTt. Estas curvas deben proporcionarse como una lista de puntos XYZ y, opcionalmente, vectores IJK. Más información disponible en la sección proyecto de seguir curva.
El Proyecto de seguimiento de punto es como un proyecto de fresado de robot, pero permite seleccionar puntos extraídos de geometría 3D y crear fácilmente una trayectoria de robot. También es posible seleccionar Importar Puntos para importar puntos 3D desde archivos CSV o TXT. Estos puntos deben proporcionarse como una lista de puntos XYZ y, opcionalmente, vectores IJK. Más información disponible en la sección de proyecto de seguimiento de puntos.
Seleccione proyecto de impresión 3D para generar un programa de impresión 3D de robot para un objeto específico. El objeto debe estar disponible en la estación de RoboDK. La trayectoria de la herramienta de impresión 3D se convierte en código G detrás de escena usando un rebanador y luego se trata como una trayectoria de herramienta de mecanizado de 3 ejes. Más información disponible en la sección impresión 3D robótica.
La prueba de exactitud Ballbar permite comprobar el funcionamiento del robot usando un dispositivo telescópico doble Ballbar. Más información sobre las pruebas de Ballbar con robot disponible aquí: https://robodk.com/Ballbar-test.
Calibrar robot permite configurar un proyecto de calibración de robot para mejorar la precisión del robot y encontrar parámetros de error del robot. Un robot calibrado se puede utilizar en cualquier proyecto de programación fuera de linea de RoboDK. La calibración del robot suele mejorar la precisión del robot en un factor de 5 o más, según el modelo del robot. La calibración del robot requiere el uso de sistemas de medición para tomar medidas del robot. La precisión y la repetibilidad del robot puede ser probada con el ISO9283 antes y/o después de la calibración. Más información sobre calibración de robots y pruebas de rendimiento aquí: https://robodk.com/robot-calibration.
Nota: Algunas de estas herramientas podrían requerir una licencia específica que amplíe la licencia de programación fuera línea predeterminada.