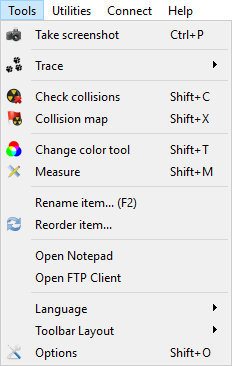
Las herramientas genéricas están disponibles en el menú Herramientas, como tomar instantáneas de la vista 3D, activar el rastreo del robot, activar la comprobación de colisiones o medir las coordenadas de puntos.
Activando el Rastreo se mostrará el seguimiento de todos los robots a medida que se mueven.
Comprobar colisiones activará o desactivará la comprobación de colisiones. Cuando la comprobación de colisiones esté activada, los objetos que están en situación de colisión se mostrarán en rojo.El Mapa de colisiones permite especificar qué interacciones de objeto se están comprobando.
Nota: Más información disponible sobre la detección de colisiones en la secciónColisiones.
Cambiar herramienta de color mostrará una pequeña ventana que permite cambiar el color de los robots y objetos. También es posible invertir los vectores normales de las superficies.
Medir mostrará una ventana que permite medir puntos en 3D con respecto a un sistema de referencia local o al sistema de referencia de la estación (medidas absolutas).
Es posible especificar el idioma de la aplicación RoboDK seleccionando Herramientas➔Idioma y seleccionando el idioma preferido. RoboDK se mostrará inmediatamente en el idioma seleccionado.
Diseño de barra de herramientas permite configurar la barra de herramientas predeterminada. Alternativamente, es posible especificar una barra de herramientas para un uso más básico o más avanzado.
Seleccione Opciones para abrir el menú principal de opciones. Más información disponible en la sección Menú opciones.