El menú principal se divide en las siguientes secciones:
1.Menú Archivo: Permite importar nuevos archivos (geometría 3D, robots, herramientas, trayectorias de herramienta,...) y abrir o guardar proyectos RoboDK (extensión de archivo RDK).
2.Menú Editar: Permite cortar/copiar/pegar un elemento o un grupo de elementos y realizar acciones de deshacer/rehacer.
3.Menú Programa:Permite crear o modificar programas de robots y otros otras acciones relacionadas con la programación en línea (OLP).
4.Menú Vista: Proporciona acciones útiles para navegar en 3D y configurar vistas específicas.
5.Menú Herramientas: Proporciona herramientas generales tales como la comprobación de colisiones, puntos de medición, o la apertura de las opciones principales.
6.Menú Utilidades: Permite realizar operaciones específicas como el uso de robots para las operaciones de manufactura, calibrar un TCP o un sistema de referencia, usando robots como una impresora 3D o como un CNC de 5 ejes, calibrar un robot... Estas operaciones pueden requerir una opción específica en la licencia.
7.Menú Conectar: Permite la conexión a un robot, un sistema de medición o simular cámaras.
8.Menú Ayuda: Permite abrir documentación en línea (F1), comprobar si hay actualizaciones o ajustar una licencia.
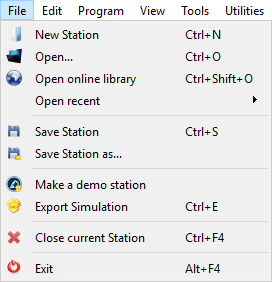
Menú Archivo
Es posible abrir, guardar o exportar documentos del menú archivo.
Nueva Estación añadirá una nueva estación en el árbol. Una estación puede ser cargada o guardada como un archivo RDK. El archivo RDK (Extensión RDK) contiene toda la información acerca de los robots y objetos, por lo que no es necesario mantener una copia separada de los elementos importados.
Consejo: Es posible tener más de una estación abierta al mismo tiempo. Haciendo doble clic en el ícono de la estación en el árbol se mostrará esa estación.
Abrir cargará un nuevo archivo RoboDK (Estación RDK) o importará cualquier otro formato de archivo reconocido, tales como .robot para archivos de robots, STEP/IGES/STL para objetos, .tool para archivos de herramientas, etc.
Abrir Biblioteca en Línea mostrará una nueva ventana con la biblioteca disponible en línea.
Guardar Estación se guardará el archivo RDK. Seleccione Guardar estación como... para proporcionar la ubicación del archivo.
Hacer una demostración la estación exportará la estación como un archivo EXE con una versión simplificada de RoboDK.
Exportar Simulación exportará un programa específico o una simulación como un PDF 3D o un archivo HTML 3D. Ejemplo.
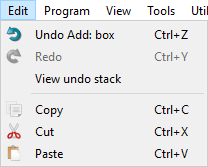
Menú Editar
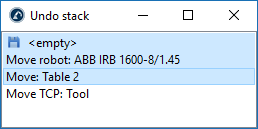
Las acciones de Deshacer (Ctrl + Z) y Rehacer (Ctrl + Y) son accesibles desde el menú Editar. El historial de Deshacer también está disponible y permite revertir los cambios, hacia atrás o hacia adelante, a un estado específico seleccionando la acción.
También es posible cortar (Ctrl + X), copia (Ctrl + C) o pegar (Ctrl + V) un elemento o un grupo de elementos del árbol de la estación. Si se copia un elemento, todos los elementos adjuntos a él también se copian.
Consejo: Es posible agrupar acciones similares en una. Por ejemplo, si el robot se mueve manualmente, cada pequeño paso se registra (por defecto). Para agrupar todos los pasos pequeños en uno: seleccione Herramientas➔Opciones➔ Agrupar acciones similares.
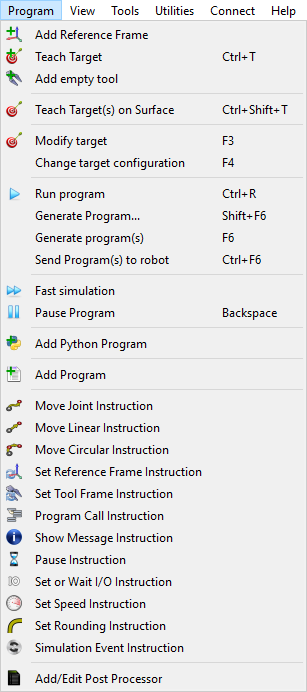
Menú del programa
El menú del programa contiene todos los componentes relacionados con la programación fuera línea (OLP) y generación de programas. Es posible añadir nuevos programas, sistemas de referencia, objetivos o herramientas a los robots. Estos componentes de la programación fuera de línea (sistemas de referencia, herramientas, objetivos, etc.) aparecen en todos los programas generados fuera de línea.
Añadir sistema de referencia agregará un nuevo sistema de referencia adjunto a la raíz de la estación o adjunto a otro sistema de referencia si se seleccionó ese sistema de referencia.
Añadir herramienta vacía se agregará un nuevo TCP a un robot. No se requiere geometría para añadir una nueva herramienta. Múltiples herramientas permiten hacer referencia a diferentes partes de la misma geometría vinculados a una herramienta.
Enseñar objetivo (Ctrl + T) añadirá un nuevo destino al sistema de referencia activo para la herramienta robot Activa. El sistema de referencia activo y la herramienta activa se pueden seleccionar en el panel del robot. También es posible hacer clic con el botón derecho en un sistema de referencia o una herramienta para activarlos.
Enseñe los Objetivos en la Superficie (Ctrl + Mayús + T) permitirá al usuario seleccionar puntos de un objeto para crear fácilmente objetivos. Un ejemplo está disponible en esta sección.
Añadir programa añadirá un nuevo programa que se puede crear mediante la Interfaz Gráfica de Usuario de RoboDK (GUI). No se requiere experiencia de programación para crear o modificar este tipo de programa robot. El programa robot puede ser simulado y generado para un robot específico, de manera sencilla y automática.
En Instrucciones del programadel documento de Programación Fuera de Línea encontrará más información sobre instrucciones del programa disponibles a través de la GUI.
Añadir Programa Python incluirá un programa/macro/script/módulo Python de ejemplo en la estación que enlaza con la API de RoboDK. El programa Python usando la API RoboDK permite crear programas de robots a partir de código de programación genérico (Python). Es posible implementar estos programas para cualquier controlador de robot específico. También es posible simular tareas específicas para ampliar los programas GUI. Estas tareas pueden ser subprogramas de robots para programación fuera línea, programación en línea o simplemente simular eventos específicos como hacer que los objetos aparezcan automáticamente en puntos aleatorios para simulaciones de selección y colocación. Un programa Python es como un archivo de texto incrustado en la estación y contiene código Python para automatizar tareas específicas en RoboDK. La API de RoboDK se implementa usando Python de forma predeterminada, pero se pueden usar otros lenguajes de programación para interactuar con RoboDK.
Nota: La diferencia entre un programa normal (usando Añadir programa) generado usando la interfaz Gráfica de Usuario (GUI) y un programa Python (usando Añadir programa Python) es que el primero no requiere experiencia en programación. Por otro lado, un Macro de Python que usa la API RoboDK permite ampliar los límites de un programa generado mediante la interfaz gráfica de usuario.
Por último, es posible Añadir o Editar Postprocesadores. Los postprocesadores definen la forma en que se generan los programas para un controlador de robot específico, lo que permite adaptarse a la sintaxis específica del proveedor. Los postprocesadores son el componente final del proceso de programación fuera línea.
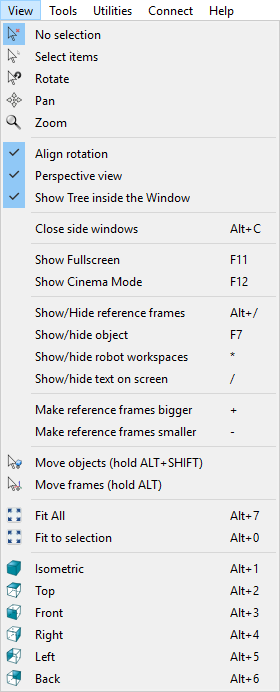
Menú Ver
La mayoría de las opciones necesarias para navegar en 3D están disponibles en el menú Ver. Es posible rotar, hacer panorámica y zoom desde este menú (así como haciendo clic derecho en la vista 3D). Esto es útil para navegar en 3D mediante un teclado de un portátil (en lugar de un ratón).
Para permitir una rotación libre en cualquier dirección desmarque la opción: Ver➔Alinear rotación. De lo contrario, RoboDK bloquea la referencia de la estación para mantener el plano XY horizontal por defecto.
Es posible mostrar u ocultar el espacio de trabajo del robot seleccionando la tecla asterisco (*). También es posible cambiar entre elementos visibles e invisibles seleccionando la tecla F7.
Consejo: Es posible hacer que los sistemas de referencia sean más grandes o más pequeños pulsando varias veces la tecla + o-. Si hay muchos elementos visibles, esto es útil para ajustar el tamaño de los sistemas de referencia y tomarlos correctamente si es necesario moverlos desde la vista 3D (manteniendo pulsada la tecla Alt, por ejemplo).
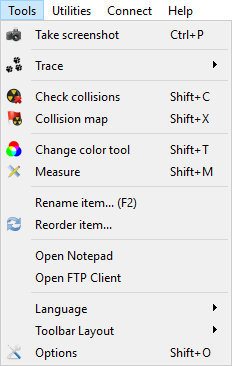
Menú herramientas
Las herramientas genéricas están disponibles en el menú Herramientas, como tomar instantáneas de la vista 3D, activar el rastreo del robot, activar la comprobación de colisiones o medir las coordenadas de puntos.
Activando el Rastreo se mostrará el seguimiento de todos los robots a medida que se mueven.
Comprobar colisiones activará o desactivará la comprobación de colisiones. Cuando la comprobación de colisiones esté activada, los objetos que están en situación de colisión se mostrarán en rojo.El Mapa de colisiones permite especificar qué interacciones de objeto se están comprobando.
Nota: Más información disponible sobre la detección de colisiones en la secciónColisiones.
Cambiar herramienta de color mostrará una pequeña ventana que permite cambiar el color de los robots y objetos. También es posible invertir los vectores normales de las superficies.
Medir mostrará una ventana que permite medir puntos en 3D con respecto a un sistema de referencia local o al sistema de referencia de la estación (medidas absolutas).
Es posible especificar el idioma de la aplicación RoboDK seleccionando Herramientas➔Idioma y seleccionando el idioma preferido. RoboDK se mostrará inmediatamente en el idioma seleccionado.
Diseño de barra de herramientas permite configurar la barra de herramientas predeterminada. Alternativamente, es posible especificar una barra de herramientas para un uso más básico o más avanzado.
Seleccione Opciones para abrir el menú principal de opciones. Más información disponible en la sección Menú opciones.
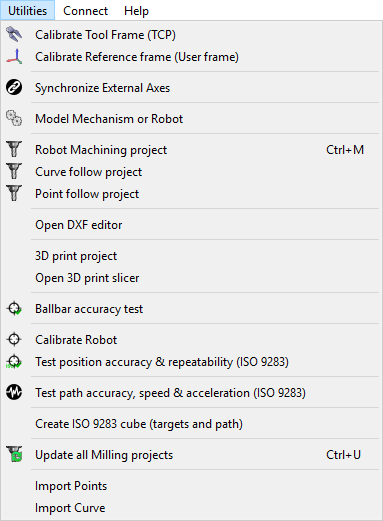
Menú Utilidades
El menú Utilidades permite realizar tareas específicas:
Calibrar Sistema de Herramienta (TCP) permite calibrar un robot TCP al proporcionar datos de la configuración real, como las configuraciones de las articulaciones para llegar a un punto utilizando diferentes orientaciones. Este procedimiento suele estar disponible de la mayoría de los teach pendant de robots. RoboDK permite calibrar un TCP con tantas configuraciones como desee. El uso de más configuraciones permite obtener un valor de TCP más preciso. Obtenga más información sobre la calibración TCP.
Calibrar Sistema de Referencia permite identificar un sistema de referencia con respecto al sistema de referencia base del robot. Esto permite hacer coincidir con precisión la parte de la configuración real con el entorno virtual. Obtenga más información sobre calibración de sistemas de referencia.
Sincronizar Ejes Externos permite configurar uno o más ejes externos y un robot como un mecanismo de robot. Más información disponible en la Sección de ejes externos.
Proyecto de Fresado Robótico puede convertir fácilmente trayectorias de herramienta de máquina a programas de robots. RoboDK puede importar los programas hechos para un CNC de 5 ejes usando el software CAM, tal como código G genérico o archivos APT. Estos programas/trayectorias de herramienta pueden ser fácilmente simulados y convertidos a programas de robots con RoboDK. Más información disponible en esta sección.
El Proyecto de seguir curva es como un proyecto de fresado de robot pero permite seleccionar curvas extraídas de la geometría 3D como trayectorias de herramienta. También es posible seleccionar Importar Curva para importar curvas 3D desde archivos CSV o TXTt. Estas curvas deben proporcionarse como una lista de puntos XYZ y, opcionalmente, vectores IJK. Más información disponible en la sección proyecto de seguir curva.
El Proyecto de seguimiento de punto es como un proyecto de fresado de robot, pero permite seleccionar puntos extraídos de geometría 3D y crear fácilmente una trayectoria de robot. También es posible seleccionar Importar Puntos para importar puntos 3D desde archivos CSV o TXT. Estos puntos deben proporcionarse como una lista de puntos XYZ y, opcionalmente, vectores IJK. Más información disponible en la sección de proyecto de seguimiento de puntos.
Seleccione proyecto de impresión 3D para generar un programa de impresión 3D de robot para un objeto específico. El objeto debe estar disponible en la estación de RoboDK. La trayectoria de la herramienta de impresión 3D se convierte en código G detrás de escena usando un rebanador y luego se trata como una trayectoria de herramienta de mecanizado de 3 ejes. Más información disponible en la sección impresión 3D robótica.
La prueba de exactitud Ballbar permite comprobar el funcionamiento del robot usando un dispositivo telescópico doble Ballbar. Más información sobre las pruebas de Ballbar con robot disponible aquí: https://robodk.com/Ballbar-test.
Calibrar robot permite configurar un proyecto de calibración de robot para mejorar la precisión del robot y encontrar parámetros de error del robot. Un robot calibrado se puede utilizar en cualquier proyecto de programación fuera de linea de RoboDK. La calibración del robot suele mejorar la precisión del robot en un factor de 5 o más, según el modelo del robot. La calibración del robot requiere el uso de sistemas de medición para tomar medidas del robot. La precisión y la repetibilidad del robot puede ser probada con el ISO9283 antes y/o después de la calibración. Más información sobre calibración de robots y pruebas de rendimiento aquí: https://robodk.com/robot-calibration.
Nota: Algunas de estas herramientas podrían requerir una licencia específica que amplíe la licencia de programación fuera línea predeterminada.
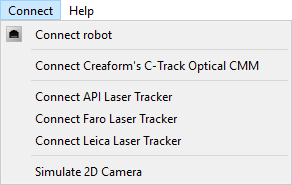
Menú de conexión
Es posible conectarse a un robot e introducir los parámetros de conexión, como la IP del robot, el nombre de usuario y la contraseña del FTP. Configurar una conexión de robot permite transferir programas a través de FTP o ejecutar programas directamente desde el PC para ciertos robots a través de controladores de robots compatibles en RoboDK. Los nuevos controladores de robots pueden ser desarrollados por los usuarios finales, más información disponible en la Sección de Controladores del robot.
También es posible conectar a sistemas de medición soportados, tales como rastreadores láser o la Óptica CMM de Creaform. Esto permite automatizar completamente la calibración del robot y las pruebas de rendimiento.
Menú de ayuda
Ayuda (F1) abre la documentación en línea. Una versión PDF de la documentación está disponible para descargar en la parte superior de cada sección. Al pulsar F1, RoboDK muestra el tema de ayuda relacionado con el elemento actualmente seleccionado.
Seleccione Comprobar si hay actualizaciones... para comprobar si hay una actualización disponible. Se abrirá un mensaje con una actualización recomendada o simplemente notificando que la versión actual ya está actualizada. Si no aparece ningún mensaje, significa que un cortafuegos está bloqueando la comunicación entre RoboDK e Internet.