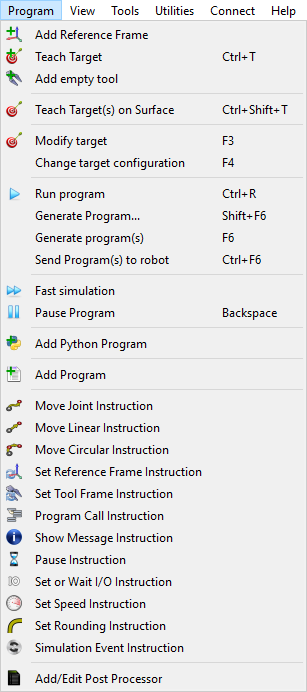
El menú del programa contiene todos los componentes relacionados con la programación fuera línea (OLP) y generación de programas. Es posible añadir nuevos programas, sistemas de referencia, objetivos o herramientas a los robots. Estos componentes de la programación fuera de línea (sistemas de referencia, herramientas, objetivos, etc.) aparecen en todos los programas generados fuera de línea.
Añadir sistema de referencia agregará un nuevo sistema de referencia adjunto a la raíz de la estación o adjunto a otro sistema de referencia si se seleccionó ese sistema de referencia.
Añadir herramienta vacía se agregará un nuevo TCP a un robot. No se requiere geometría para añadir una nueva herramienta. Múltiples herramientas permiten hacer referencia a diferentes partes de la misma geometría vinculados a una herramienta.
Enseñar objetivo (Ctrl + T) añadirá un nuevo destino al sistema de referencia activo para la herramienta robot Activa. El sistema de referencia activo y la herramienta activa se pueden seleccionar en el panel del robot. También es posible hacer clic con el botón derecho en un sistema de referencia o una herramienta para activarlos.
Enseñe los Objetivos en la Superficie (Ctrl + Mayús + T) permitirá al usuario seleccionar puntos de un objeto para crear fácilmente objetivos. Un ejemplo está disponible en esta sección.
Añadir programa añadirá un nuevo programa que se puede crear mediante la Interfaz Gráfica de Usuario de RoboDK (GUI). No se requiere experiencia de programación para crear o modificar este tipo de programa robot. El programa robot puede ser simulado y generado para un robot específico, de manera sencilla y automática.
En Instrucciones del programadel documento de Programación Fuera de Línea encontrará más información sobre instrucciones del programa disponibles a través de la GUI.
Añadir Programa Python incluirá un programa/macro/script/módulo Python de ejemplo en la estación que enlaza con la API de RoboDK. El programa Python usando la API RoboDK permite crear programas de robots a partir de código de programación genérico (Python). Es posible implementar estos programas para cualquier controlador de robot específico. También es posible simular tareas específicas para ampliar los programas GUI. Estas tareas pueden ser subprogramas de robots para programación fuera línea, programación en línea o simplemente simular eventos específicos como hacer que los objetos aparezcan automáticamente en puntos aleatorios para simulaciones de selección y colocación. Un programa Python es como un archivo de texto incrustado en la estación y contiene código Python para automatizar tareas específicas en RoboDK. La API de RoboDK se implementa usando Python de forma predeterminada, pero se pueden usar otros lenguajes de programación para interactuar con RoboDK.
Nota: La diferencia entre un programa normal (usando Añadir programa) generado usando la interfaz Gráfica de Usuario (GUI) y un programa Python (usando Añadir programa Python) es que el primero no requiere experiencia en programación. Por otro lado, un Macro de Python que usa la API RoboDK permite ampliar los límites de un programa generado mediante la interfaz gráfica de usuario.
Por último, es posible Añadir o Editar Postprocesadores. Los postprocesadores definen la forma en que se generan los programas para un controlador de robot específico, lo que permite adaptarse a la sintaxis específica del proveedor. Los postprocesadores son el componente final del proceso de programación fuera línea.