Objetivo del Robot
Los objetivos del robot permiten grabar posiciones de robots específicas para poder mover el robot a esa ubicación. Siga los siguientes pasos para añadir un nuevo objetivo y ver la información adjunta:
●Seleccione Programa➔
Este registrará la posición actual del robot utilizando el sistema de referencia activo 

●Haga clic con el botón derecho en un destino y seleccione Más opciones... F3 para ver la posición pose grabada y los valores de las articulaciones.
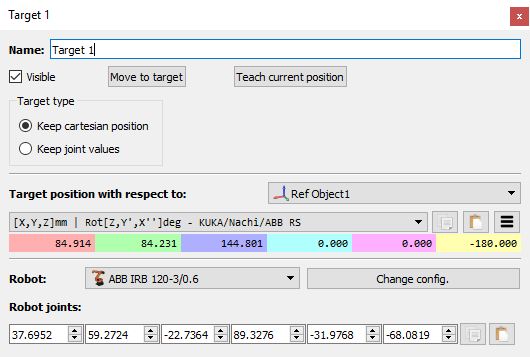
La creación de un nuevo destino registra el TCP con respecto al sistema de referencia en el espacio cartesiano, así como los ejes del robot actual. De forma predeterminada, RoboDK crea destinos como objetivos cartesianos (Mantener posición cartesiana 
Por otro lado, es posible especificar el objetivo en el espacio de articulación (Mantener valores conjuntos 
Es habitual utilizar objetivos de articulaciones para alcanzar una primera posición de aproximación cerca del área de trabajo, entonces, los objetivos cartesianos aseguran que la trayectoria de herramienta no se altere si se modifica el sistema de referencia o los sistemas de herramientas.
Es posible ver otras configuraciones para llegar a la misma pose con el robot. Más información en el sección siguiente.