Panel robot
Haga doble clic en un robot en el árbol de elementos (o en la vista 3D) para abrir el panel del robot.
Es posible mover los ejes del robot desde la sección Mover los ejes articulados e ingresar valores específicos de ejes de articulaciones en los cuadros de texto. Estos valores y la posición del robot coinciden con los valores del controlador del robot.
Haga doble clic en los límites de las articulaciones para modificar los límites de los ejes del robot. De forma predeterminada, RoboDK utiliza los límites de hardware de las especificaciones del fabricante del robot. Algunas aplicaciones pueden requerir límites de ejes más limitados (límites de software). Los valores de las articulaciones pueden ser copiados 

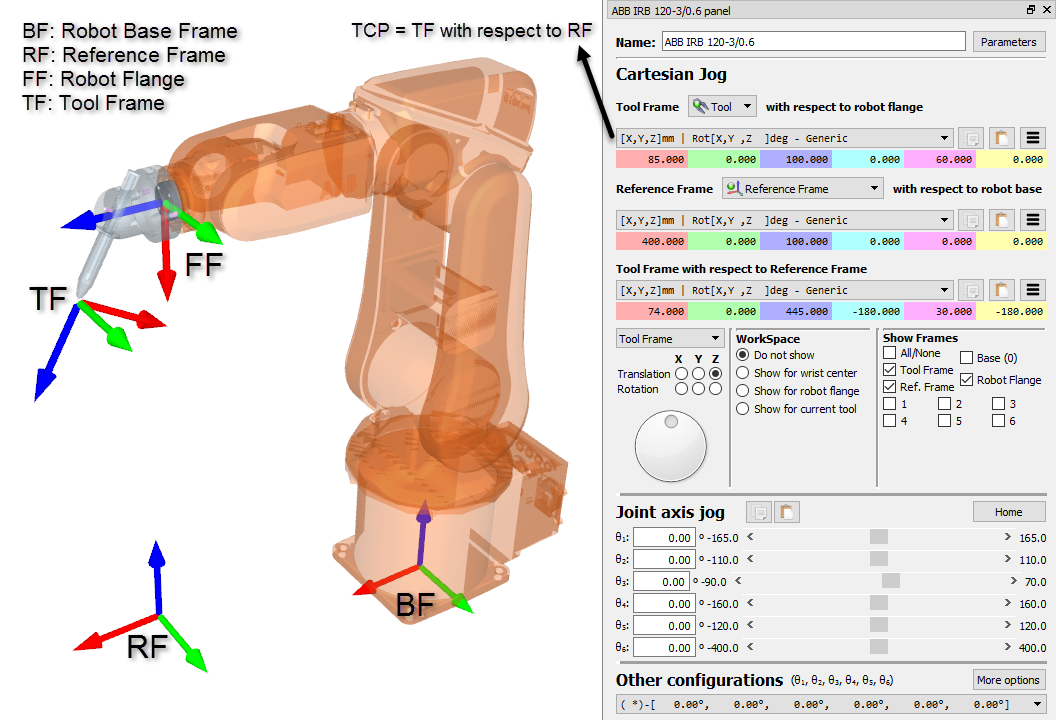
La Sección de movimiento cartesiano muestra toda la información relacionada con la cinemática del robot:
●El Sistema de herramienta (TF) con respecto a la brida de montaje del robot (FF) define dónde se encuentra localizado el sistema de herramienta seleccionado con respecto a la brida de montaje del robot. La brida de montaje del robot es siempre la misma, sin embargo, el sistema de herramienta cambia dependiendo de la herramienta que se monta en el robot. Esta relación también es conocida como UTOOL, ToolData o simplemente herramienta en la mayoría de los controladores de robots. La herramienta robot también se conoce como el TCP (punto central de la herramienta). La herramienta seleccionada se convierte en la herramienta "activa". La herramienta activa se utiliza cuando se crean nuevos destinos y programas. La herramienta seleccionada muestra una marca verde en su ícono: 
●El Sistema de Referencia (RF) con respecto a la Base del Robot (BF) define dónde se encuentra el sistema de referencia con respecto al sistema de base del robot. El sistema de base del robot nunca se mueve, sin embargo, se pueden utilizar diferentes sistemas de referencia para colocar cualquier objeto con respecto al mismo sistema de base del robot. Esta relación también se conoce como UFRAME, WorkObject MFRAME o referencia en la mayoría de los controladores de robots. El sistema de referencia seleccionado en el panel robot se convierte en el sistema de referencia "activo". El sistema de referencia activo se utiliza como referencia para nuevos objetivos y programas de robots. El sistema de referencia seleccionado muestra una marca verde en su ícono: 
●El sistema de la herramienta (TF) con respecto al sistema de referencia (RF) muestra la posición del TCP activo con respecto al sistema de referencia activo para la posición actual del robot. Modifique este valor para mover el robot. Los ejes de las articulaciones se recalculan automáticamente. Estas coordenadas cartesianas se registran cuando se crea un nuevo destino (programa➔Enseñar objetivo), junto con los ejes del robot. El destino también se adjunta al sistema de referencia activo.
Una lista de posibles configuraciones está disponible en la sección Otras configuraciones. La configuración del robot define un estado específico del robot sin cruzar ninguna singularidad. Cambiar la configuración requiere cruzar una singularidad. Más información disponible en la sección Configuraciones de robots.
Finalmente, el botón Parámetros en la parte superior derecha permite realizar algunos ajustes cinemáticos, seleccionar el post-procesador preferido o extrayendo parámetros precisos después de un proyecto de calibración de robots. La modificación de estos valores sólo debe ser requerida en determinadas circunstancias.