Haga doble clic en un Sistema de Referencia para ver más detalles sobre ese sistema de referencia y modificar su posición con respecto al sistema de la base del robot o cualquier otro sistema de referencia disponible en la estación. De forma predeterminada, las coordenadas mostradas (pose) son relativas al elemento primario del sistema de referencia (en este ejemplo, el sistema Base del robot).
Nota: El sistema de referencia también se puede modificar desde el Panel del robot.
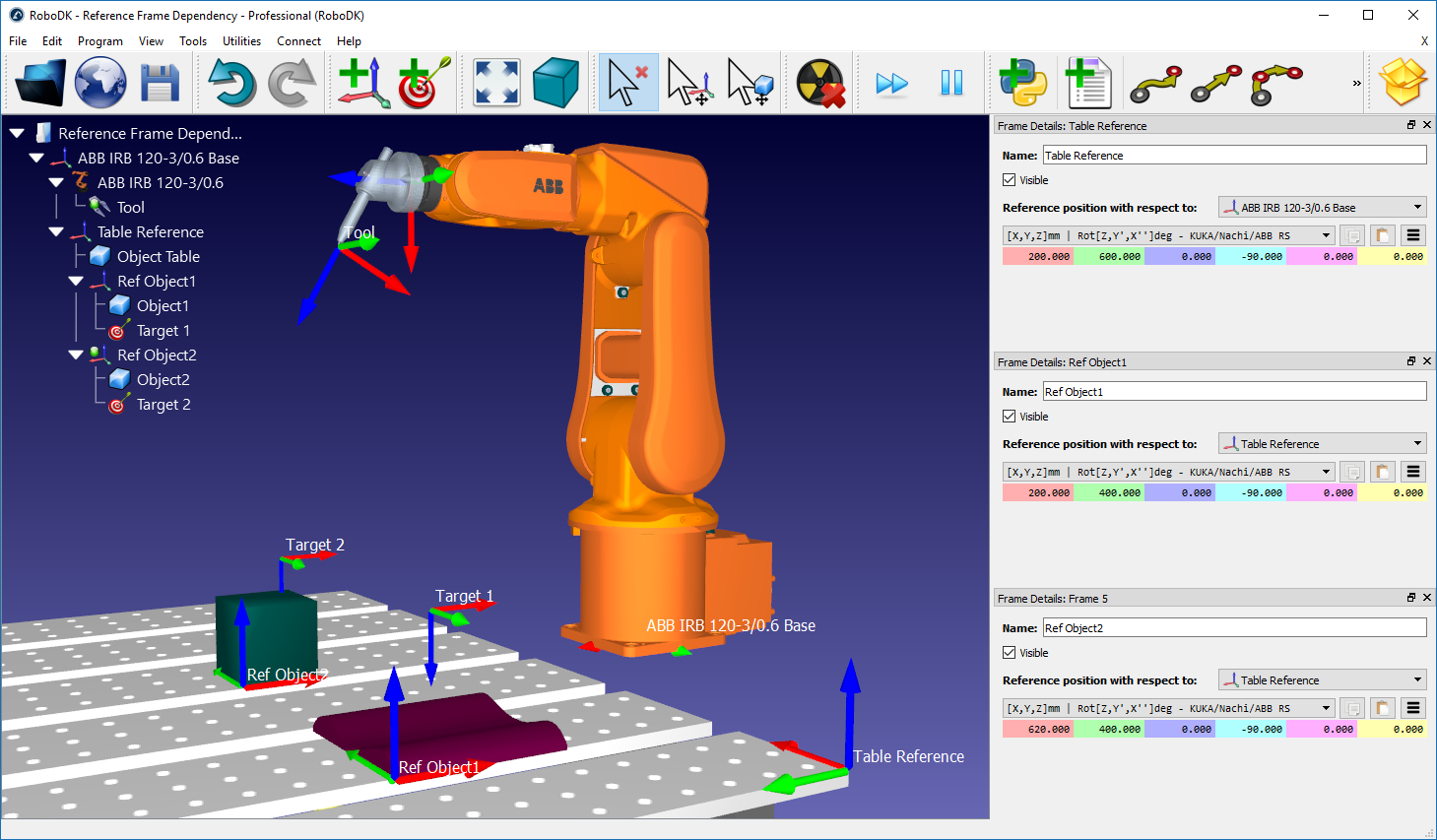
Los sistemas de referencia múltiples pueden estar relacionados entre sí para crear la dependencia que existe en una aplicación real. Por ejemplo, una tabla puede tener una posición específica con respecto al robot. Entonces, dos o más objetos de la tabla pueden tener una posición específica con respecto a la referencia de la tabla. Mover la tabla de referencia no alterará la relación entre los objetos y la tabla, pero sí alterará la relación de todos los objetos con respecto al robot. La siguiente imagen muestra un ejemplo de este tipo.
Consejo: Se recomienda mover objetos utilizando sistemas de referencia. En este caso, es más fácil moverlos en la estación y utilizar el mismo sistema de referencia como referencia para los objetivos del robot.
Vídeo: Obtenga más información sobre los sistemas de referencia y por qué son importantes para la simulación y la programación fuera de línea: https://www.youtube.com/watch?v=GGc_bXPs2dk