Ejemplo de cliente OPC UA
Este ejemplo le mostrará cómo puede añadir conectividad OPC-UA Client a RoboDK. RoboDK incluye un Addin OPC-UA que le permite añadir compatibilidad OPC UA a sus proyectos RoboDK.
En este ejemplo aprenderá a obtener los datos de la estación RoboDK a través del cliente OPC UA.
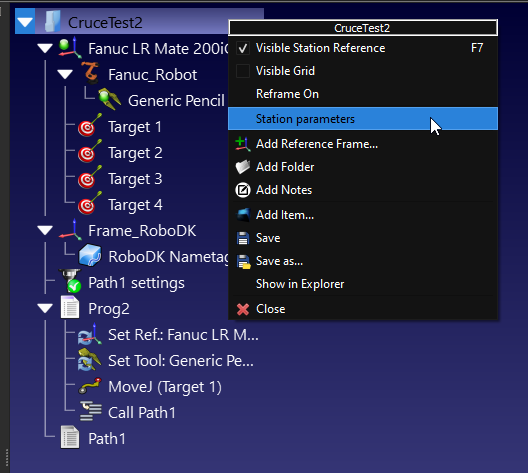
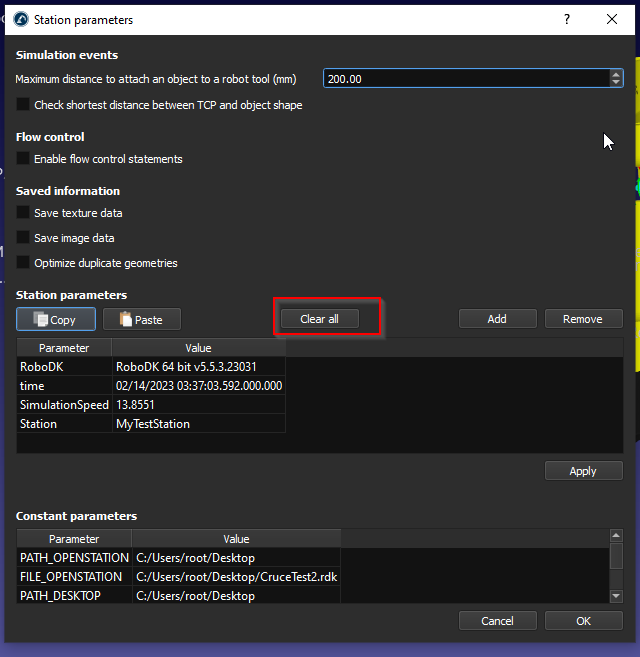
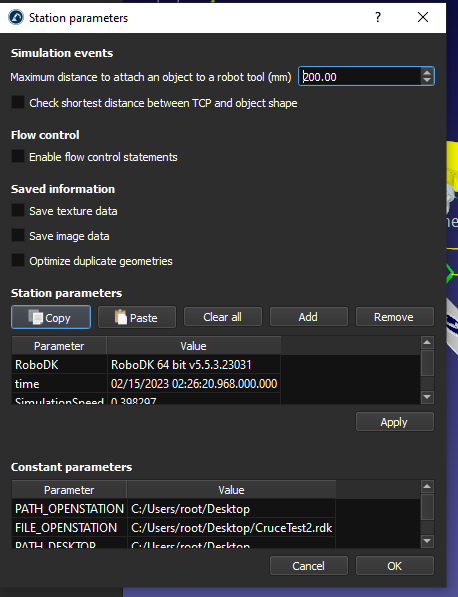
Aparecerá la pantalla de parámetros de la estación y pulse "Borrar todo" para borrar todos los parámetros de la estación.
Implementación con interfaz
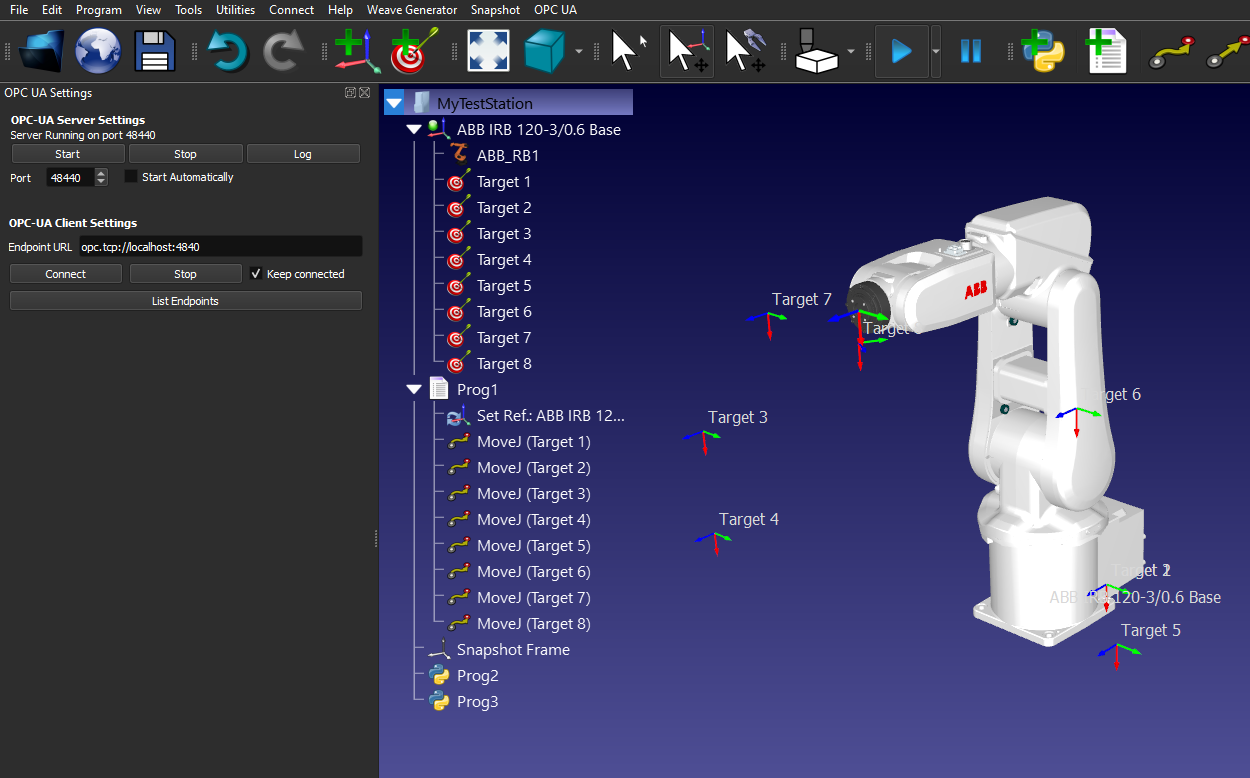
Podemos crear un proyecto RoboDK más con el servidor OPC UA configurado e iniciado.
Add Client
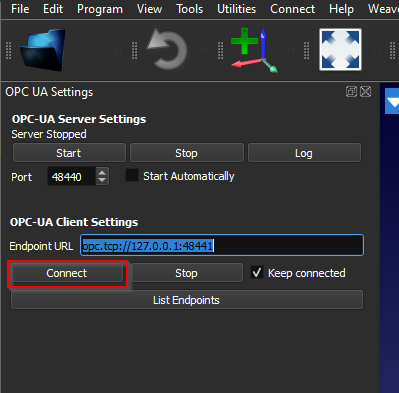
Esta sección muestra cómo añadir un cliente OPC UA.
Introduzca la URL del punto final, por ejemplo: opc.tcp://127.0.0.1:48441.
Debe hacer coincidir la dirección IP y la configuración del puerto con su servidor OPC UA de destino.
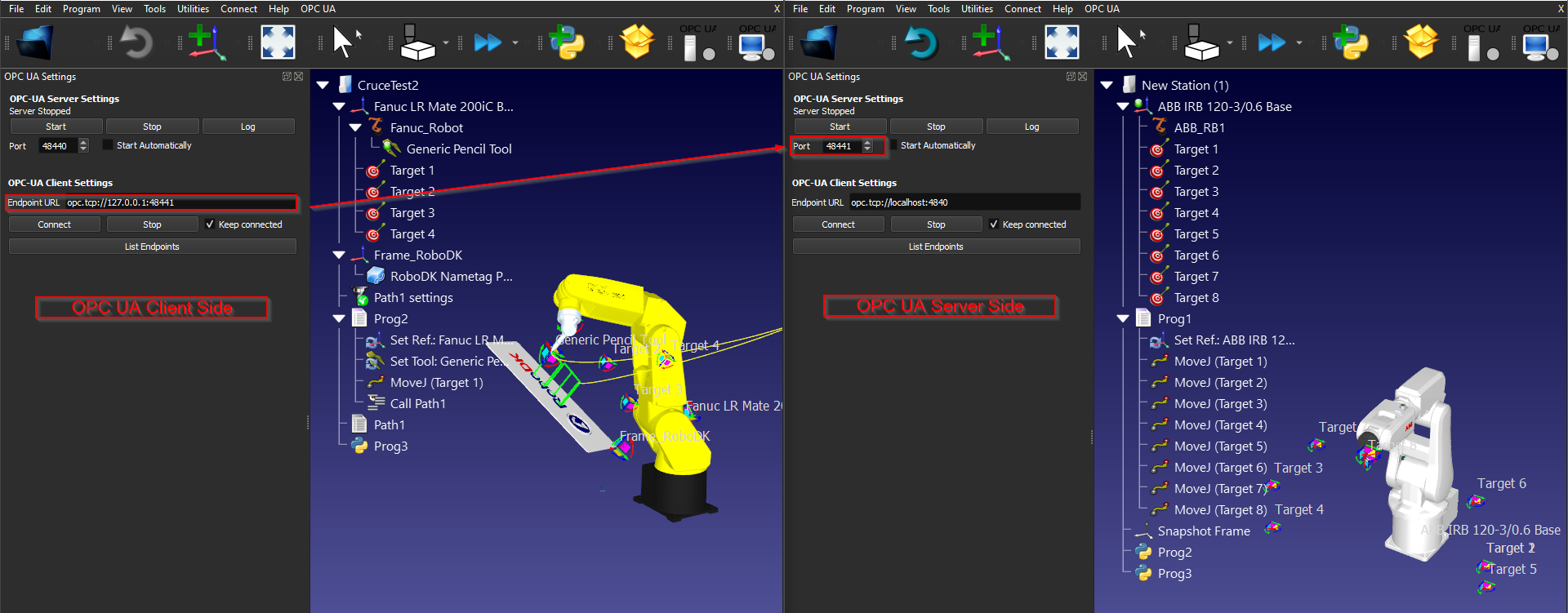
Pulse "Conectar" para establecer la conexión.
si aparece un mensaje con" Variables del servidor recuperadas. Haga clic con el botón derecho en el elemento de la estación y seleccione 'Parámetros de la estación' para ver las variables", se establece la conexión.
Haga clic con el botón derecho del ratón en su estación y seleccione "Parámetros de la estación".

Nodos cliente
Puede consultar los detalles de cada nodo en la sección de nodos.
Implementación con la API de RoboDK
Después de obtener los datos de los nodos del servidor OPC UA a través del cliente OPC UA en RoboDK, también puede obtener estos datos utilizando RoboDK-Python-API.
Instalación
Puede consultar este enlace para instalar la API Python de RoboDK.
https://robodk.com/doc/en/PythonAPI/intro.html#how-to-install
O instale manualmente el paquete robodk para Python:
pip install robodk
Script
Este script de ejemplo muestra cómo obtener los parámetros de la estación a través de la API Python de RoboDK.
from robodk import robolink # API RoboDK
RDK = robolink.Robolink()
from robodk import * # API RoboDK
from robolink import * # Caja de herramientas del robot
itemlist = RDK.ItemList()
si itemlist:
# Obtener todos los parámetros de la estación
print('Los Parámetros Vaild están configurados en su Estación..')
StationParameters=RDK.getParams()
para StationParameter en StationParameters:
print("Parámetros de estación %s : %s"%(ParámetroEstación[0],str((ParámetroEstación[1]))))
si no:
print('No hay lista de parámetros..')
He aquí el resultado del script de ejemplo:
Los Parámetros Vaild se configuran en su Estación..
Parámetros de la estación RoboDK : RoboDK 64 bit v5.5.3.23031
Hora de los parámetros de la estación : 14/02/2023 03:58:29.191.000.000
Parámetros de la estación Velocidad de simulación : 13.8551
Parámetros de la estación Estación : MyTestStation