Implementación con Beckhoff TwinCAT 3
Puede utilizar el software TwinCAT 3 de Beckhoff para probar la conectividad con el servidor OPC UA de RoboDK.
Añadir servidor TwinCAT3
Puede empezar creando el cliente OPC UA seleccionando E/S>Dispositivos>Añadir nuevo elemento.
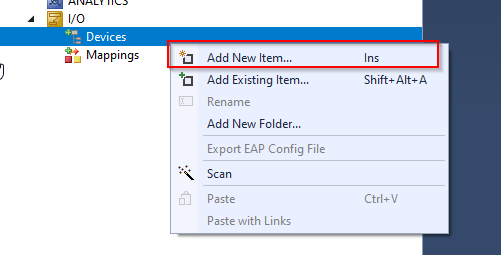
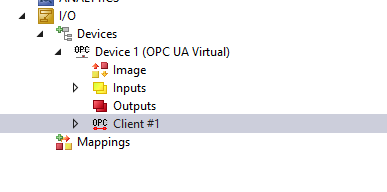
Seleccione Dispositivo OPC UA virtual de OPC >OK.
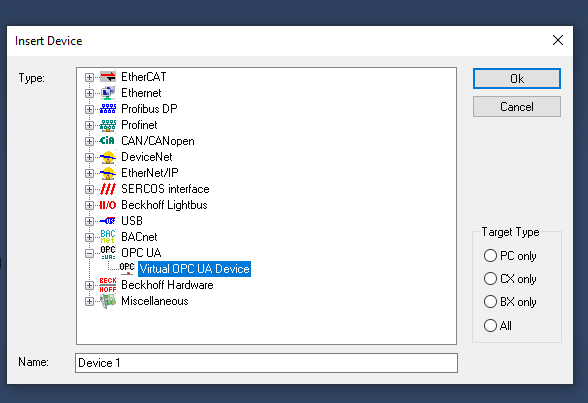
Se inserta OPC UA Virtual.
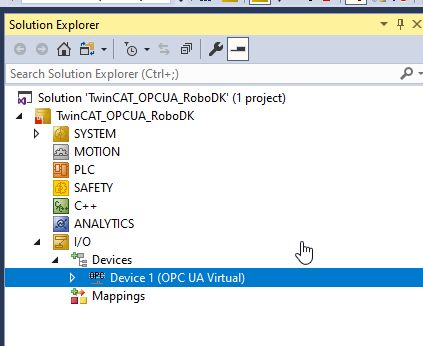
Necesitamos añadir un cliente OPC UA para acceder al servidor OPC UA de RoboDK.
Seleccione Dispositivo 1 >Clic derecho >Añadir nuevo elemento.
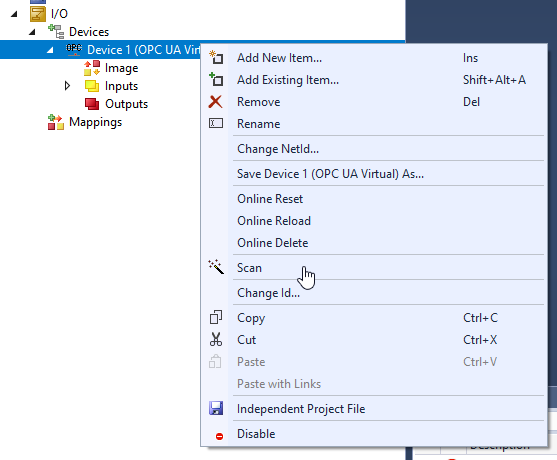
Seleccione "Cliente OPC UA (Módulo)" y Aceptar.
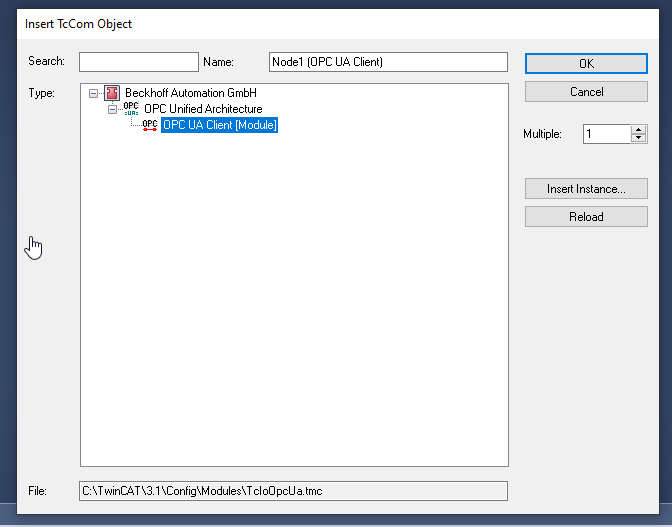
Se inserta el Cliente OPC UA.
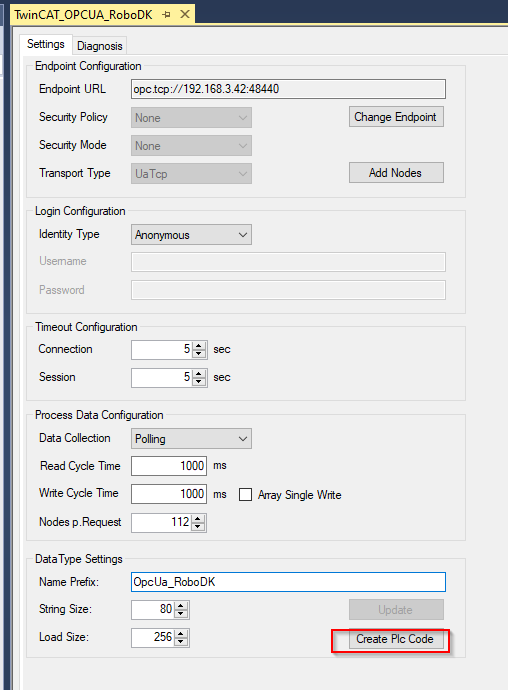
Configurar el servidor
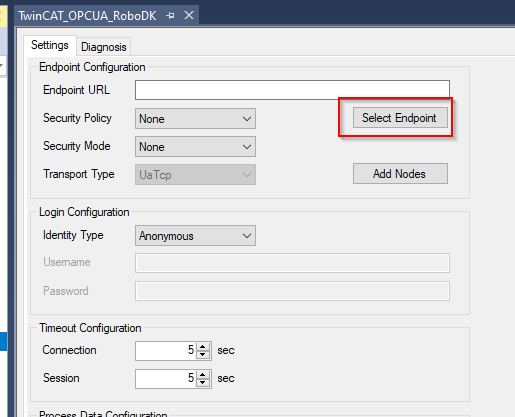
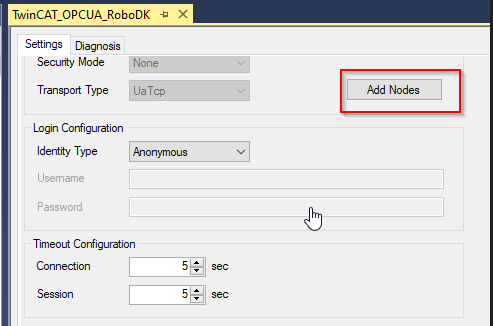
Abra el cliente OPC UA >Vaya a la pestaña Configuración>haga clic en "Seleccionar punto final" para configurar el punto final del servidor OPC UA al que desea acceder.
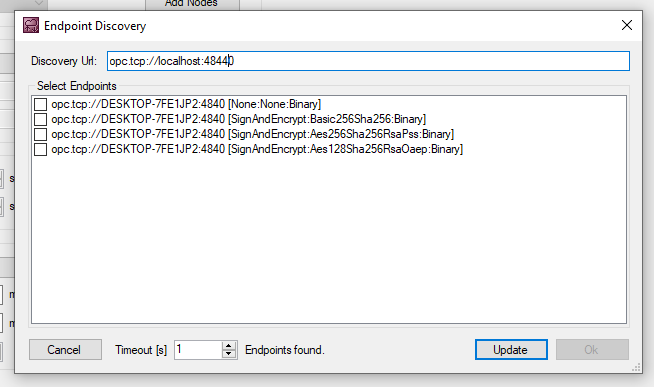
Introduzca la URL del servidor OPC UA de RoboDK y Actualícelo.
Add RoboDK Server Method
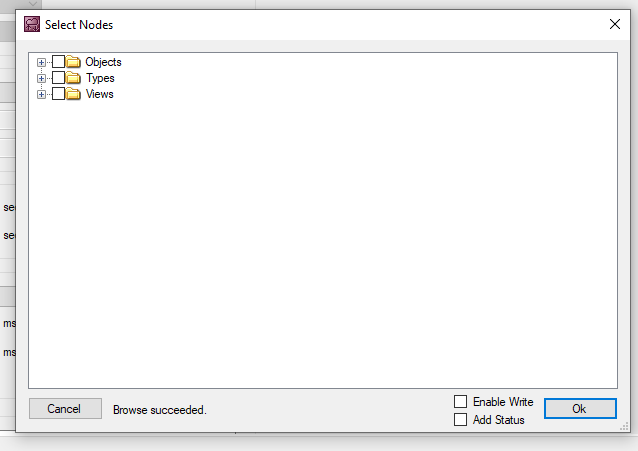
Pulse "Añadir nodos" para examinar el nodo que se encuentra dentro del servidor OPC UA.
Si se establece la conexión entre TwinCAT y el servidor OPC UA, puede examinar los detalles del servidor OPC UA.
Seleccione todos los Métodos y Ok.
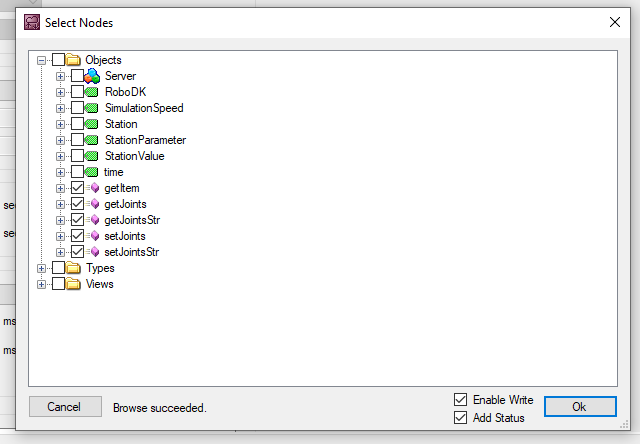
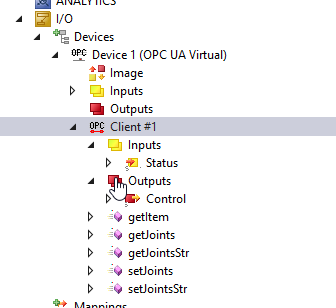
Los métodos se insertan en su Configuración.
Generar automáticamente el método RoboDK
Configure el prefijo de su nombre en este campo.
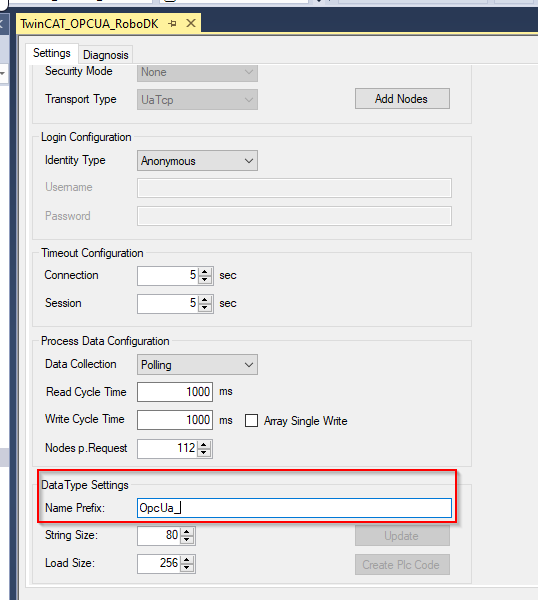
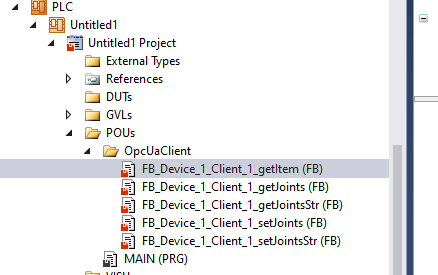
Pulse "Crear Código Plc" para crear el Código PLC desde TwinCAT.
Se crea una carpeta OpcUaClient en su proyecto y todos los métodos de RoboDK se crean en formato de bloque de función IEC61131-3.
Ejemplo de programa PLC
Esta sección muestra un programa de ejemplo de un PLC TwinCAT de Beckhoff que se comunica con el servidor OPC UA de RoboDK.
PROGRAMA PRINCIPAL
VAR
bConectado :BOOL;
StationPointer :DINT;
iPaso :INT;
bStart :BOOL;;
i :INT;
TON :TON
bReset :BOOL;
bEscribir :BOOL;
TON2 :TON
bShow :BOOL:=TRUE;
bVis :BOOL:=Verdadero;
FIN_VAR
VAR
Nombre_robot :CADENA(80):='ABB_RB1';
ID_artículo :ULINT;
arrJoints :ARRAY[0..11]DE LREAL;
strJoints :CADENA(80):='';
arrJointsFromStr:ARRAY[1..11]OF LREAL;
sSeparador :CADENA(1) := ',';
arrJointsComando:ARRAY[1..11]OF LREAL;
strJointsComando:STRING(80);
FIN_VAR
VAR CONSTANTE
cStepWaitCmd :INT:=0;
cStepInit INT:=5;
cStepGetItem INT:=10;
cStepGetItemReset INT:=20;
cStepGetItemError :INT:=990;
cStepGetJoints INT:=30;
cStepGetJointsReset INT:=40;
cStepGetJointsError INT:=991;
cStepGetJointsStr :INT:=50;
cStepGetJointsStrReset:INT:=60;
cStepGetJointsStrError:INT:=992;
cStepSetJointStrDelay :INT:=69;
cStepSetJointsStr :INT:=70;
cStepSetJointsStrReset:INT:=80;
cStepSetJointsStrError:INT:=993;
cStepEnd INT:=300;
cStepWaitReset :INT:=999;
FIN_VAR
VAR
aSplit :ARRAY[1..11] OF STRING(80);
bResultadoSplit :BOOL;
depurar :BOOL;
URL :STRING:='http://192.168.3.42:8091';
FIN_VAR
bConectado:=OPCUA_VirtualClient_RoboDK_Station.bConectado;
CASO iStep DE
cStepWaitCmd:
IF bStart THEN
iPaso:=cPasoInicio;
bInicio:=FALSE;
FIN_IF
cStepInit:
PunteroEstación:=0;
FOR i :=1 TO 11 DO
arrJoints[i]:=0,0;
arrJointsFromStr[i]:=0.0;
aSplit[i]:='';
FIN_FOR
IF NOT OPCUA_VirtualClient_RoboDK_Station.getItem.bBusy
AND NOT OPCUA_VirtualClient_RoboDK_Station.getItem.bError
AND NOT OPCUA_VirtualClient_RoboDK_Station.getJoints.bBusy
AND NOT OPCUA_VirtualClient_RoboDK_Station.getJoints.bError
AND NOT OPCUA_VirtualClient_RoboDK_Station.getJointsStr.bBusy
AND NOT OPCUA_VirtualClient_RoboDK_Station.getJointsStr.bError
AND NOT OPCUA_VirtualClient_RoboDK_Station.setJoints.bBusy
AND NOT OPCUA_VirtualClient_RoboDK_Station.setJoints.bError
AND NOT OPCUA_VirtualClient_RoboDK_Station.setJointsStr.bBusy
AND NOT OPCUA_VirtualClient_RoboDK_Station.setJointsStr.bError
ENTONCES
iPaso:=cPasoGetItem;
FIN_IF
iPaso:=cPasoGetItem;
cStepGetItem:
IF OPCUA_VirtualClient_RoboDK_Station.getItem.bDone THEN
iPaso:=cPasoGetItemReset;
Item_ID:=OPCUA_VirtualClient_RoboDK_Station.getItem.Item_ID;
ELSIF OPCUA_VirtualClient_RoboDK_Station.getItem.bError THEN
iStep:=cStepGetItemError;
FIN_IF
cStepGetItemReset:
IF NOT OPCUA_VirtualClient_RoboDK_Station.getItem.bError
AND NOT OPCUA_VirtualClient_RoboDK_Station.getItem.bBusy
ENTONCES
iPaso:=cPasoGetJoints;
FIN_IF
cStepGetJoints:
IF OPCUA_VirtualClient_RoboDK_Station.getJoints.bDone
AND NOT OPCUA_VirtualClient_RoboDK_Station.getJoints.bBusy
ENTONCES
iStep:=cStepGetJointsReset;
ELSIF OPCUA_VirtualClient_RoboDK_Station.getJoints.bError THEN
iPaso:=991;
FIN_IF
cStepGetJointsReset:
IF NOT OPCUA_VirtualClient_RoboDK_Station.getItem.bError
AND NOT OPCUA_VirtualClient_RoboDK_Station.getItem.bBusy
ENTONCES
iStep:=cStepGetJointsStr;
FIN_IF;
cStepGetJointsStr:
IF OPCUA_VirtualClient_RoboDK_Station.getJointsStr.bDone
AND NOT OPCUA_VirtualClient_RoboDK_Station.getJointsStr.bBusy
ENTONCES
iStep:=cStepGetJointsStrReset;
ELSIF OPCUA_VirtualClient_RoboDK_Station.getJointsStr.bError THEN
iStep:=cStepGetJointsStrError;
FIN_IF
cStepGetJointsStrReset:
IF NOT OPCUA_VirtualClient_RoboDK_Station.getJointsStr.bError
AND NOT OPCUA_VirtualClient_RoboDK_Station.getJointsStr.bBusy
ENTONCES
iPaso:=cPasoSetJointStrDelay;
FIN_IF;
cStepSetJointStrDelay:
strJointsComando:=''; strJointsComando:=CONCAT(LREAL_TO_STRING(arrJointsComando[1]),strJointsComando);
strJointsComando:=CONCAT(strJointsComando,',');
strJointsComando:=CONCAT(strJointsComando,LREAL_TO_STRING(arrJointsComando[2]));
strJointsComando:=CONCAT(strJointsComando,',');
strJointsComando:=CONCAT(strJointsComando,LREAL_TO_STRING(arrJointsComando[3]));
strJointsComando:=CONCAT(strJointsComando,',');
strJointsComando:=CONCAT(strJointsComando,LREAL_TO_STRING(arrJointsComando[4]));
strJointsComando:=CONCAT(strJointsComando,',');
strJointsComando:=CONCAT(strJointsComando,LREAL_TO_STRING(arrJointsComando[5]));
strJointsComando:=CONCAT(strJointsComando,',');
strJointsComando:=CONCAT(strJointsComando,LREAL_TO_STRING(arrJointsComando[6]));
TON2(IN:=VERDADERO,PT:=T#0,2S);
IF TON2.Q THEN
TON2(IN:=FALSO);
iPaso:=cPasoSetJointsStr;
FIN_IF
cStepSetJointsStr:
SI (
OPCUA_VirtualClient_RoboDK_Station.setJointsStr.bDone
Y NO
OPCUA_VirtualClient_RoboDK_Station.setJointsStr.bBusy
)
OR NOT bEscribir
ENTONCES
iPaso:=cPasoSetJointsStrReset;
ELSIF OPCUA_VirtualClient_RoboDK_Station.setJointsStr.bError
ENTONCES
iStep:=cStepSetJointsStrError;
FIN_IF
cStepSetJointsStrReset:
bEscribir:=FALSE;
OPCUA_VirtualClient_RoboDK_Station.setJointsStr.bExecute:=FALSE;
IF NOT OPCUA_VirtualClient_RoboDK_Station.setJointsStr.bError
AND NOT OPCUA_VirtualClient_RoboDK_Station.setJointsStr.bBusy
ENTONCES
iPaso:=cFinPaso;
FIN_IF;
cStepEnd:
TON(IN:=VERDADERO,PT:=T#0,1S);
IF TON.Q THEN
TON(IN:=FALSE);
IF NOT debug THEN
iPaso:=10;
ELSE
iPaso:=cPasoSetJointStrDelay;
FIN_IF;
FIN_IF
cStepGetItemError:
Item_ID:=0;
iPaso:=cPasoEsperarReinicio;
cStepGetJointsError:
FOR i :=0 TO 11 DO
arrJoints[i]:=-99999.99;
FIN_FOR
iPaso:=cPasoEsperarReinicio;
cStepGetJointsStrError:
strJoints:='';
iPaso:=cPasoEsperarReinicio;
cStepWaitReset:
IF bReset THEN
iPaso:=cPasoInicio;
bReinicio:=FALSE;
FIN_IF;
FIN_CASE
aSplit[1] := strJoints;
FOR i:=1 TO 7 DO
bResultadoSplit := BuscarYSplit(
pSeparador := ADR(sSeparador)
,pSrcString := ADR(aSplit[i])
,pCadenaIzquierda:= ADR(aSplit[i])
,nTamañoIzquierda := TAMAÑO(aSplit[i])
,pCadenaDerecha:= ADR(aSplit[i+1])
,nTamañoDerecho := SIZEOF(aSplit[i+1])
,bBuscarDesdeDerecha := FALSE );
IF NOT bResultadoSplit THEN
SALIDA
FIN_IF
FIN_FOR
PARA i :=1 A 6 HACER
arrJointsFromStr[i]:=STRING_TO_LREAL(aSplit[i]);
FIN_FOR;
//
OPCUA_VirtualClient_RoboDK_Station.getItem(
bExecute:=iStep=cStepGetItem
,Nombre_del_artículo:=Nombre_del_robot
);
OPCUA_VirtualClient_RoboDK_Station.getJoints(
bEjecutar:=iPaso=cPasoGetJoints
,Item_ID:=Item_ID,Juntas=>arrJuntas
);
OPCUA_VirtualClient_RoboDK_Station.getJointsStr(
bExecute:=iStep=cStepGetJointsStr
,Nombre_robot:=Nombre_robot,Juntas=>strJuntas
);
IF bWrite THEN
OPCUA_VirtualClient_RoboDK_Station.setJointsStr(
bEjecutar:=TRUE
,Nombre_robot:=Nombre_robot,Juntas:=strComandoJuntas);
FIN_IF;