Métodos
El servidor OPC UA de RoboDK también dispone de algunos métodos que permiten al usuario acceder a los datos de la estación RoboDK de forma dinámica.
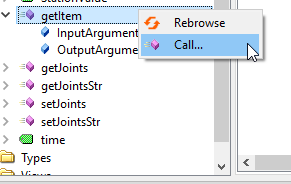
Podemos hacer clic con el botón derecho del ratón en Método>Llamada para ejecutar el método.
getItem
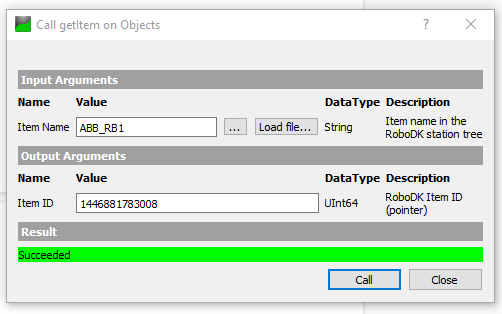
getItem es un Método que permite al usuario obtener el puntero de su Item.
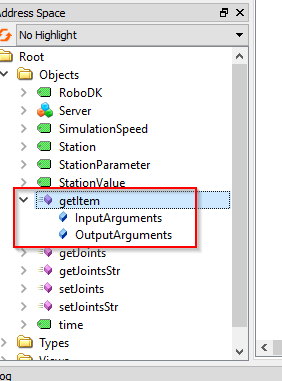
Para los InputArguments, Nombre del Dispositivo es necesario, puede imagen el Nombre del Dispositivo es el Nombre de su Estación,Nombre del Robot..etc.. Y Item ID es el OutputArguments que devuelve el Puntero de ese Dispositivo.
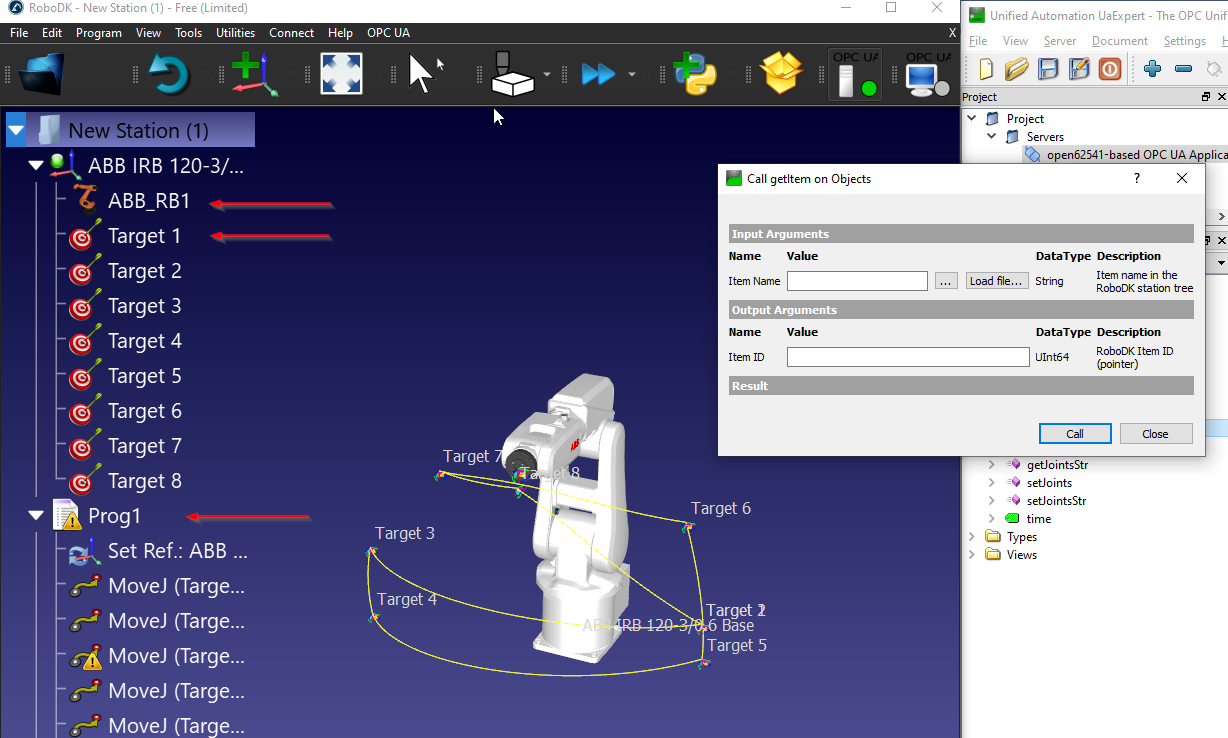
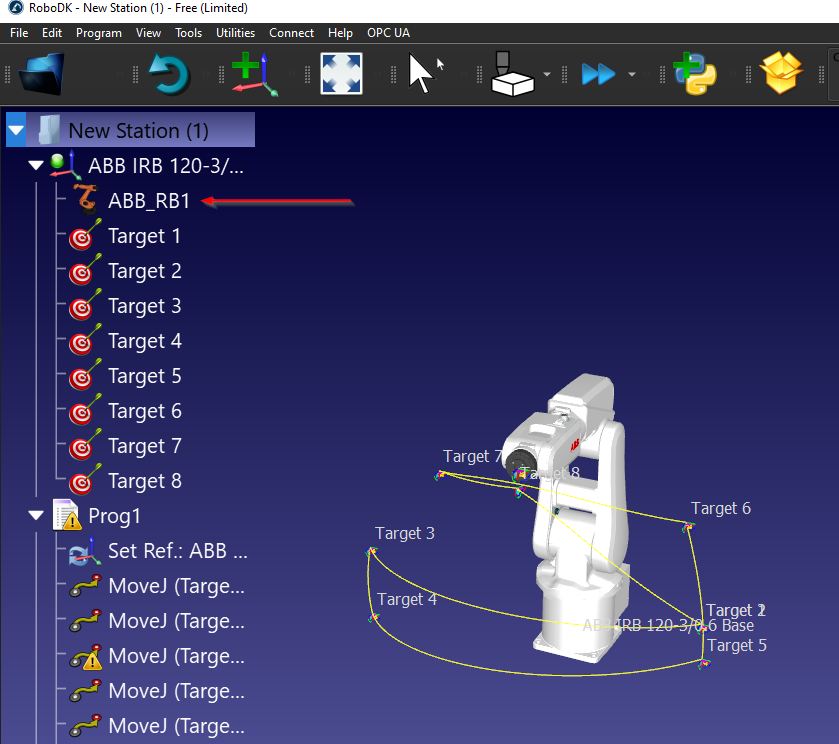
En este Ejemplo, recibí el Item ID (Puntero) de mi Robot ABB que se llama como "ABB_RB1".
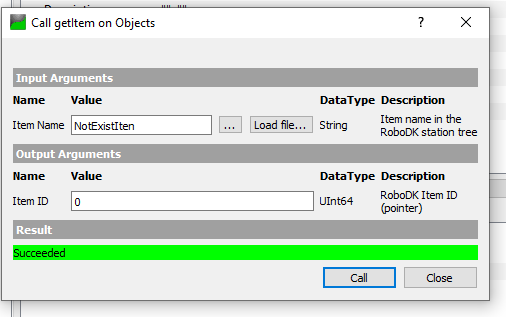
Se devuelve 0 si el Nombre del artículo no es válido o no existe dentro de su estación.
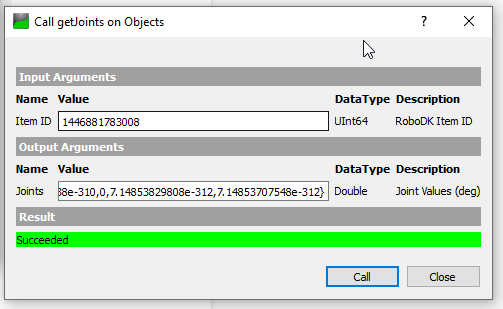
getJoints
getJonits es un método que permite al usuario obtener el valor de la articulación del robot desde la estación, basándose en el ID del elemento.
El ID del elemento es el valor del puntero de su elemento, y puede obtenerlo del método getItem().
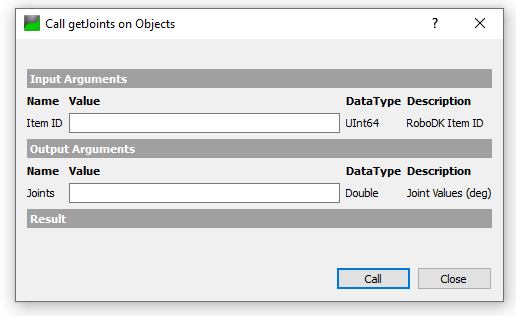
Obtendremos el ID del artículo con este nombre de artículo "ABB_RB1", y se devuelve un valor UInt64.
El valor de las juntas se devuelve al pasar el ID del artículo en el método que obtuvimos en el anterior.
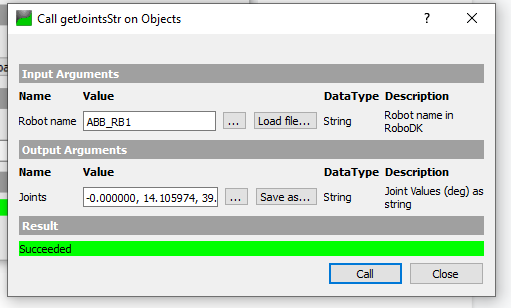
getJointsStr
getJointsStr es un método que permite al usuario obtener el valor de las Juntas basándose en un valor de cadena.
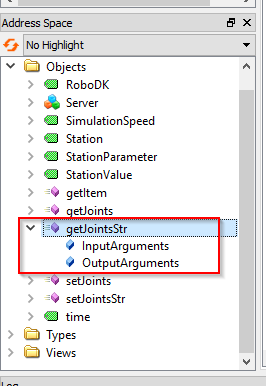
Podemos pasar el nombre del Robot (String) en este método.
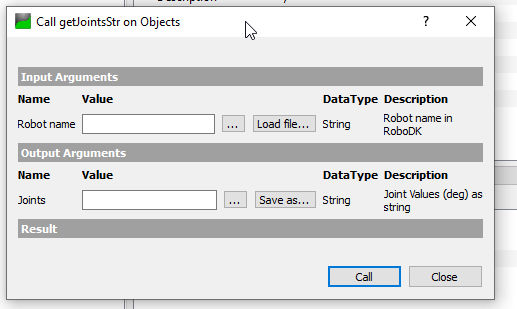
En Mi estación, ABB_RB1 es el nombre de mi robot.
Basta con pasar "ABB_RB1" en el parámetro Nombre del robot y llamar al método - Se devuelve el valor de la articulación en formato String.
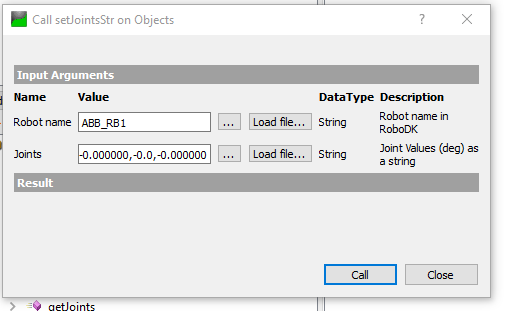
setJointsStr
setJointsStr es un método que permite al usuario establecer el valor de las Juntas del Robot, basándose en un Valor de Cadena.
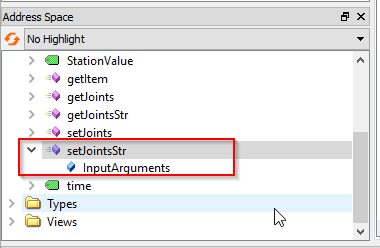
En el nombre del Robot, se pasa ABB_RB1, y podemos pasar simplemente una cadena con el valor de la articulación en el parámetro Articulaciones.
For example:-0.000000,0.000000,-0.000000,-0.000000,-0.0,-0.000000