Nodos del servidor
Existen algunos nodos dentro del servidor OPC UA de RoboDK que le permiten intercambiar información básica sobre su estación.
RoboDK
El nodo RoboDK es un nodo que proporciona la versión real de su software RoboDK.
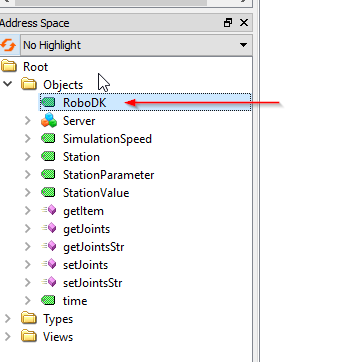
En este ejemplo se ha utilizado la versión RoboDK 64 Bit v5.5.3.23031.

SimulaciónVelocidad
Velocidad de simulación es un nodo que muestra la velocidad de simulación actual y permite al usuario sobrescribir la velocidad de simulación actual.
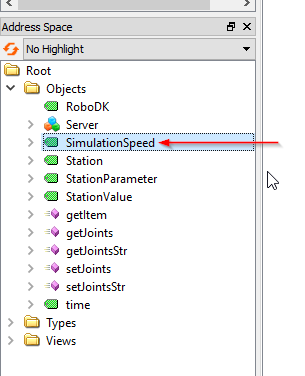
El valor del nodo está referenciado a la barra de deslizamiento de la velocidad de simulación.
La simulación actual puede leerse desde este nodo y puede sobrescribir la velocidad de simulación.

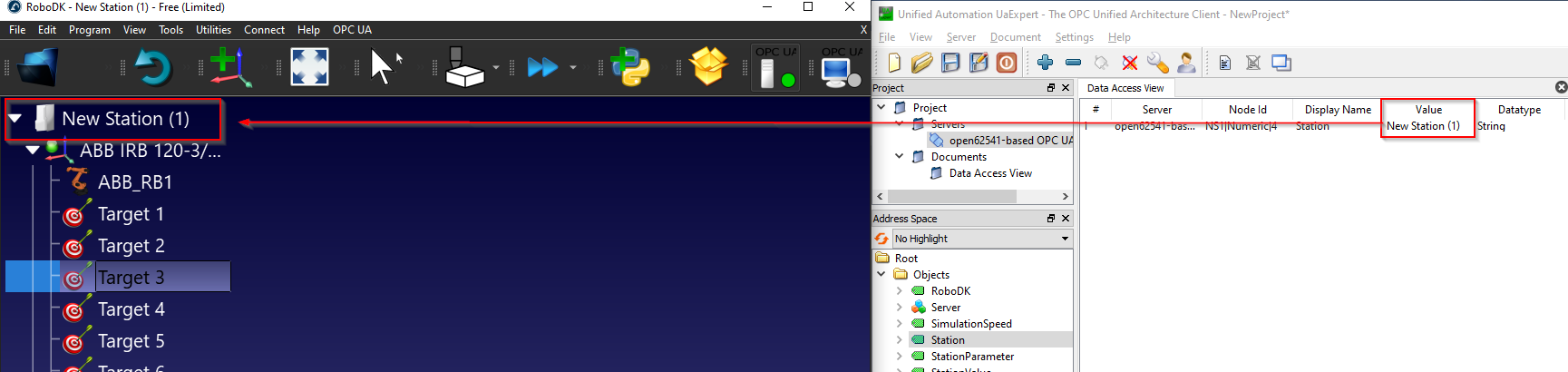
Estación
El Nodo Estación es un nodo que permite al usuario obtener el nombre actual de la Estación en RoboDK.
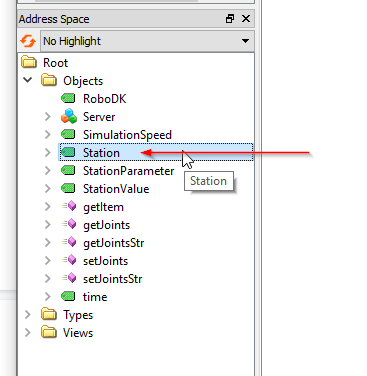
Como puede ver a continuación, el nodo Estación hace referencia a su "Nombre de estación" en RoboDK.
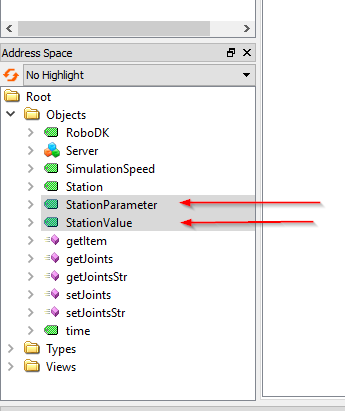
Parámetros de la estación/Valor de la estación
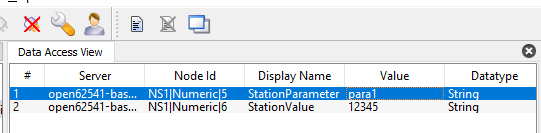
El Parámetro de la Estación y el Valor de la Estación son un Nodo conjunto de pares que permite al usuario obtener o establecer cualquier parámetro dentro de su Estación. El Servidor OPC UA de RoboDK monitorizará continuamente el valor real de "StationParameter" y devolverá el Valor de ese "StationParameter", desde el Nodo Valor de la Estación.
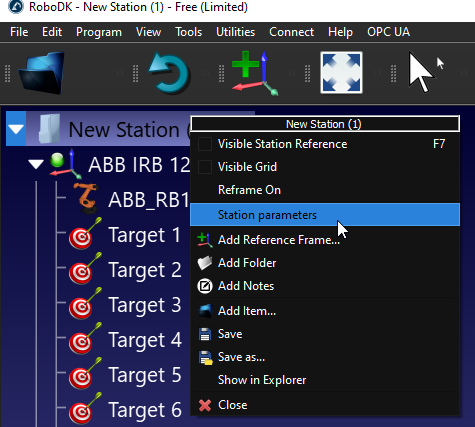
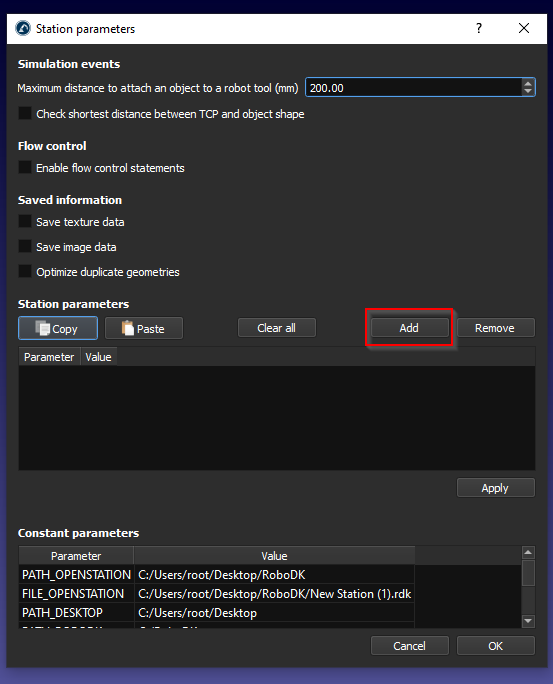
Puede ver los parámetros de su estación haciendo clic con el botón derecho del ratón en su estación RoboDK>Parámetros de la estación.
En el campo Parámetros constantes puede ver los parámetros por defecto de la estación y su valor.
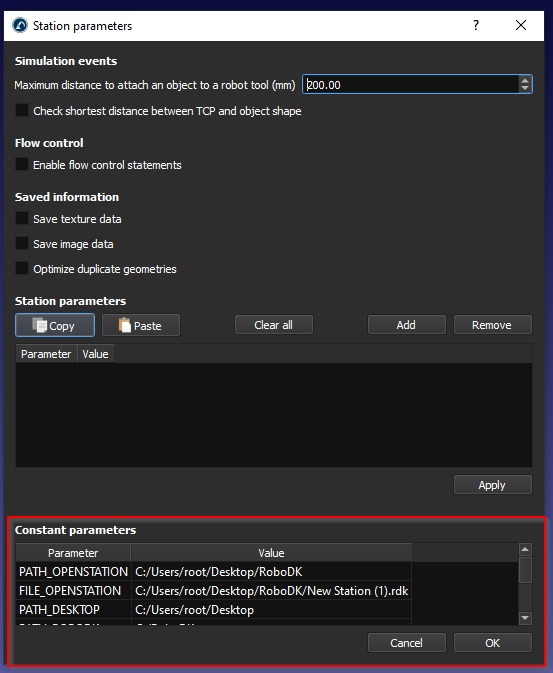
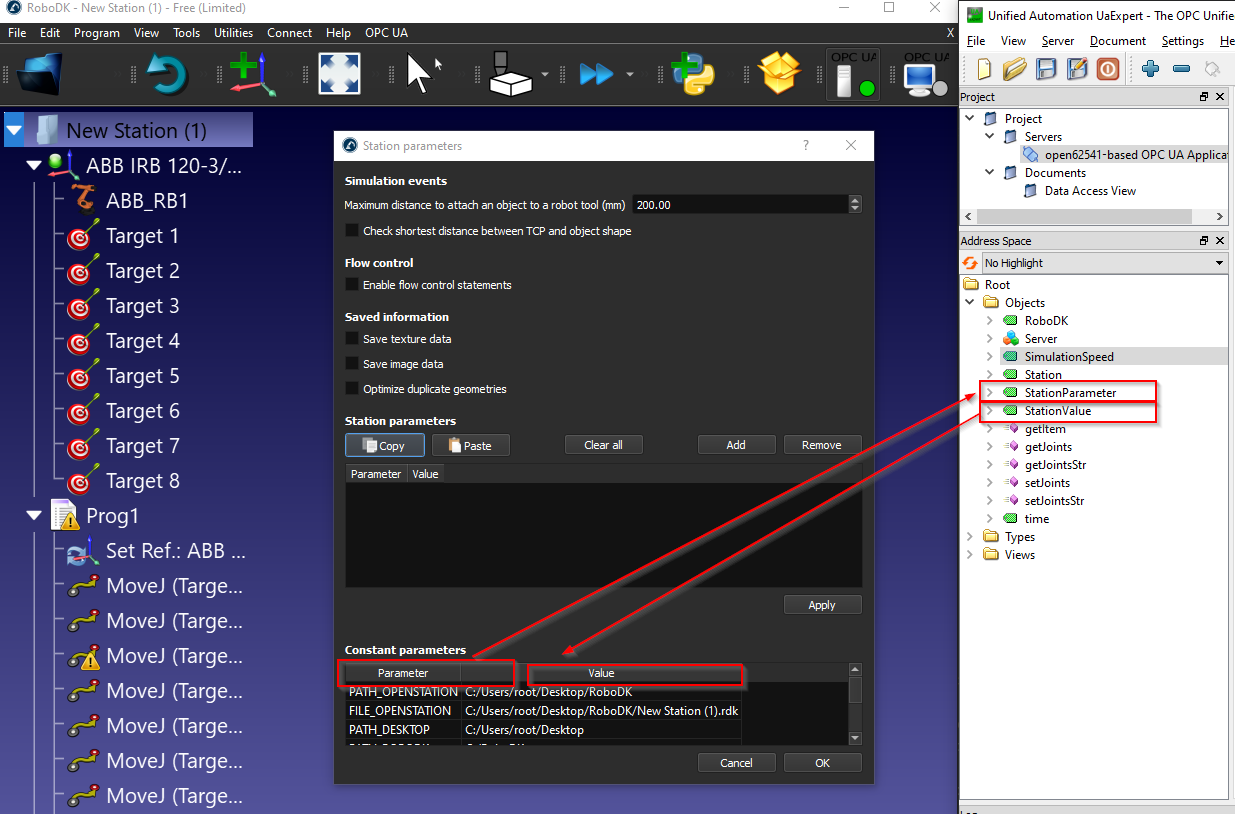
El parámetro de la estación se refiere al campo "Parámetro" y el valor de la estación al campo "Valor".
Y podemos crear nuestros propios Parámetros haciendo clic en el botón "Añadir".
Se añade un nuevo parámetro Estación.
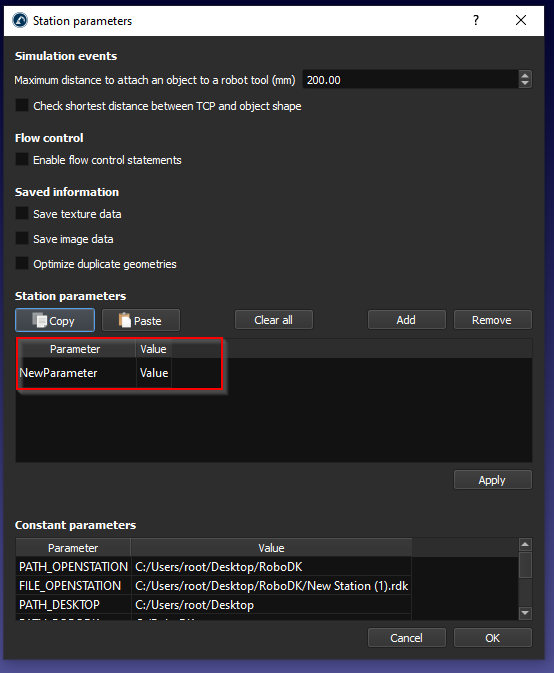
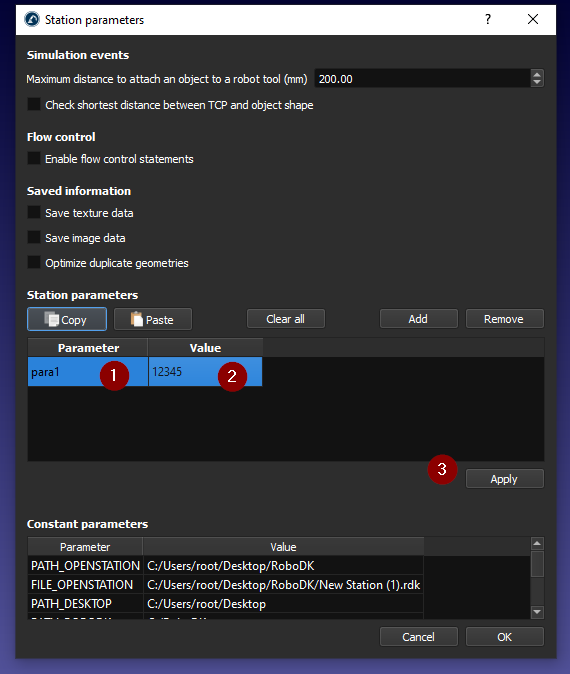
Introduzca el nombre y el valor del parámetro y pulse Aplicar para guardarlo.
También puede obtener su propio parámetro de estación.
Tiempo
El nodo hora es un nodo que permite obtener la hora actual de la RoboDK Station.
Se devuelve un valor con formato DataTime.

Y este Nodo se actualiza continuamente.
