Puesta en marcha con UaExpert
Puede utilizar el software UaExpert para probar la conectividad con el servidor OPC UA de RoboDK.
Puede descargar la versión gratuita del software UaExpert de la página web de Unified Automation: https://www.unified-automation.com/downloads/opc-ua-clients.html.
Addin UaExpert Server
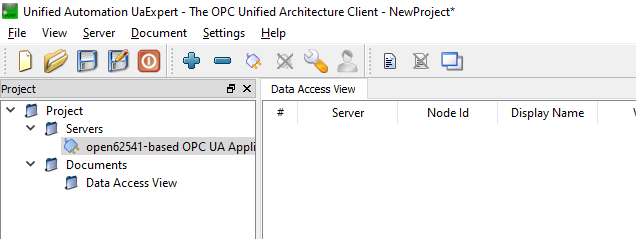
Inicie UaExpert y haga clic en el botón "+" para añadir el servidor OPC UA de RoboDK.
Expanda el descubrimiento personalizado y seleccione la opción <Doble clic para añadir servidor.> para añadir el servidor OPC UA de RoboDK.
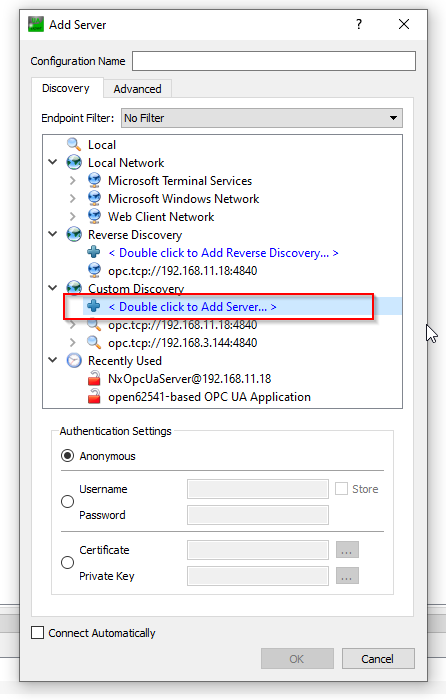
Introduzca la URL del servidor OPC UA, opc.tcp://127.0.0.1:48440 que configuró en el paso anterior.
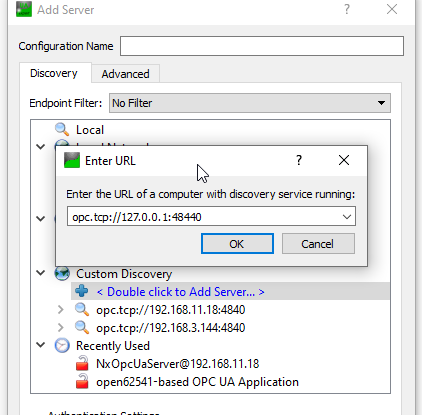
Conecte el servidor OPC UA con seguridad "Ninguna".
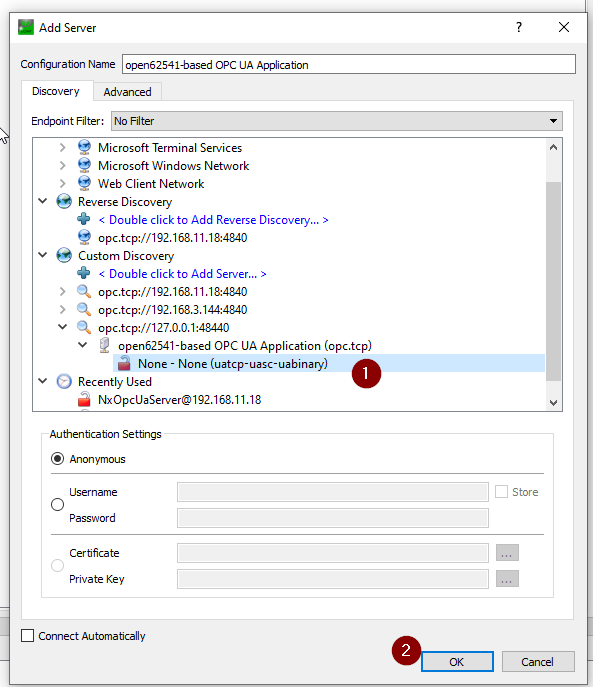
El servidor está configurado.
Conéctese al servidor
Ahora puede conectarse al servidor OPC UA de RoboDK desde UaExpert.
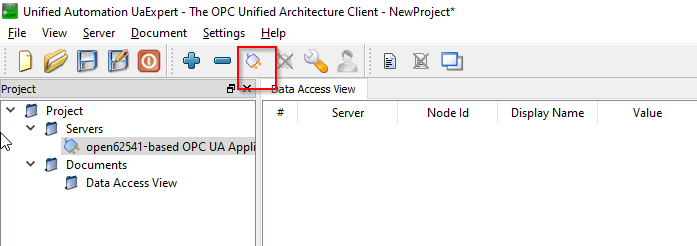
Podrá ver los Nodos y Métodos cuando se establezca la conexión.

Nodos del servidor
Existen algunos nodos dentro del servidor OPC UA de RoboDK que le permiten intercambiar información básica sobre su estación.
RoboDK
El nodo RoboDK es un nodo que proporciona la versión real de su software RoboDK.
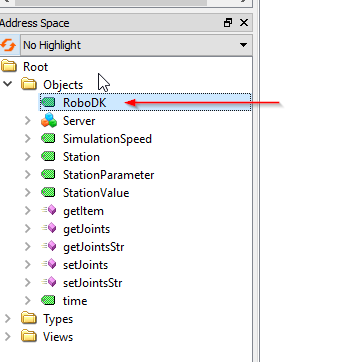
En este ejemplo se ha utilizado la versión RoboDK 64 Bit v5.5.3.23031.

SimulaciónVelocidad
Velocidad de simulación es un nodo que muestra la velocidad de simulación actual y permite al usuario sobrescribir la velocidad de simulación actual.
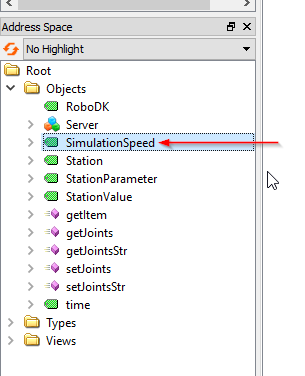
El valor del nodo está referenciado a la barra de deslizamiento de la velocidad de simulación.
La simulación actual puede leerse desde este nodo y puede sobrescribir la velocidad de simulación.

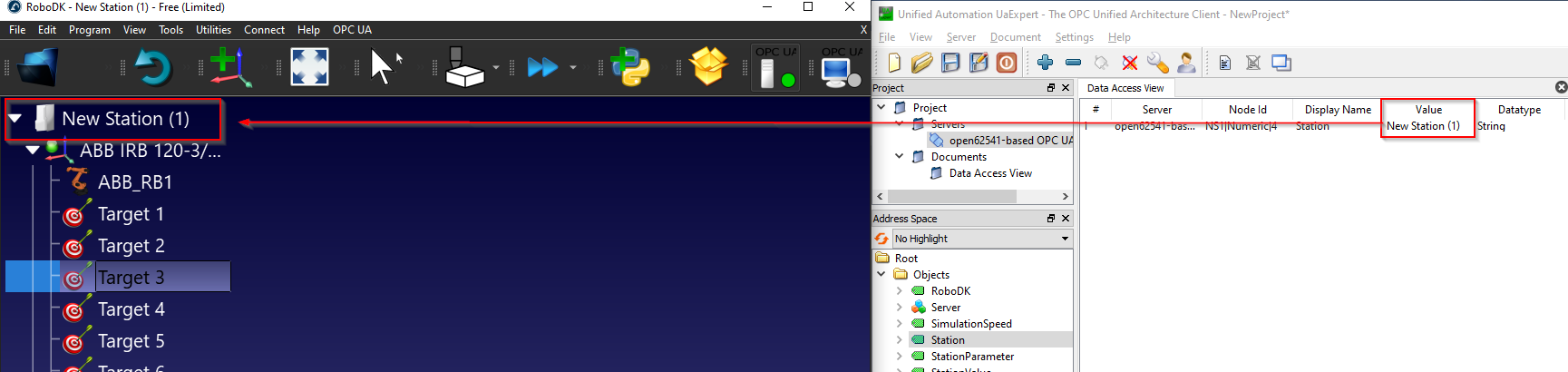
Estación
El Nodo Estación es un nodo que permite al usuario obtener el nombre actual de la Estación en RoboDK.
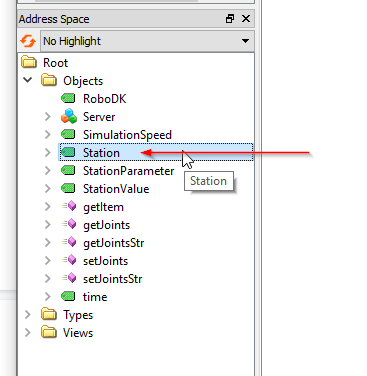
Como puede ver a continuación, el nodo Estación hace referencia a su "Nombre de estación" en RoboDK.
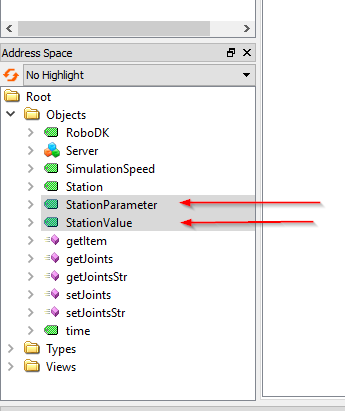
Parámetros de la estación/Valor de la estación
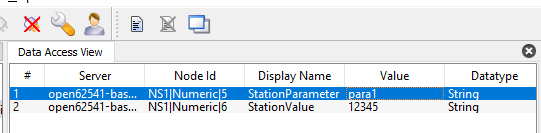
El Parámetro de la Estación y el Valor de la Estación son un Nodo conjunto de pares que permite al usuario obtener o establecer cualquier parámetro dentro de su Estación. El Servidor OPC UA de RoboDK monitorizará continuamente el valor real de "StationParameter" y devolverá el Valor de ese "StationParameter", desde el Nodo Valor de la Estación.
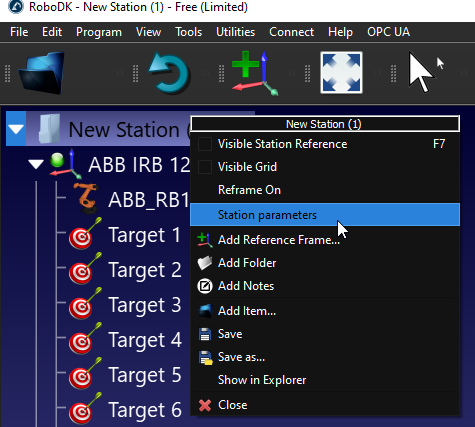
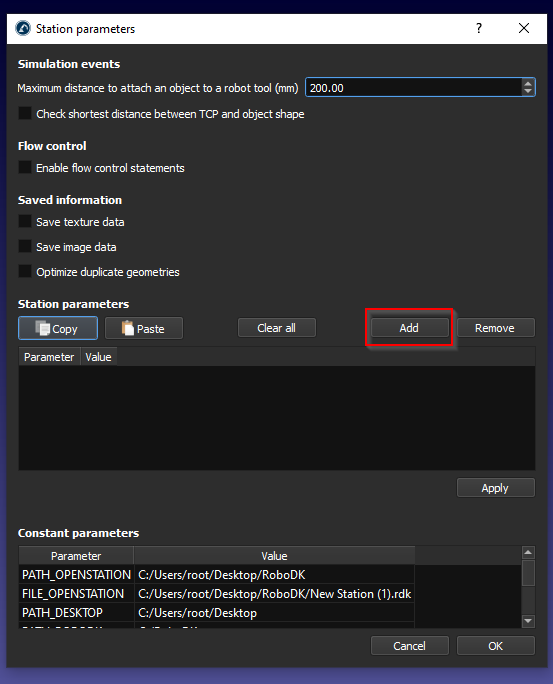
Puede ver los parámetros de su estación haciendo clic con el botón derecho del ratón en su estación RoboDK>Parámetros de la estación.
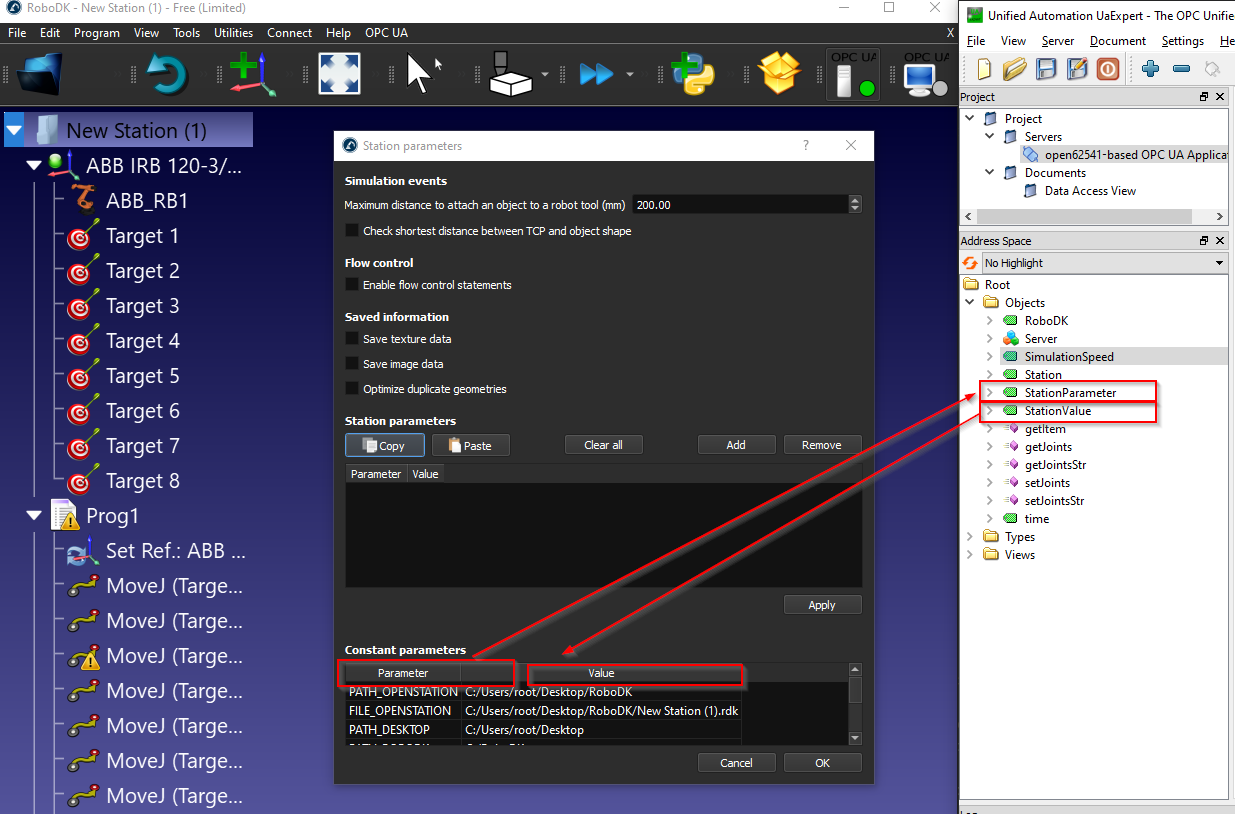
En el campo Parámetros constantes puede ver los parámetros por defecto de la estación y su valor.
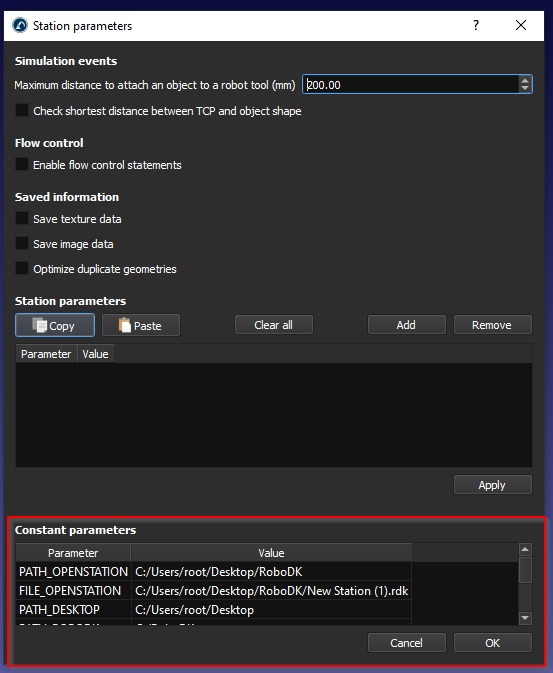
El parámetro de la estación se refiere al campo "Parámetro" y el valor de la estación al campo "Valor".
Y podemos crear nuestros propios Parámetros haciendo clic en el botón "Añadir".
Se añade un nuevo parámetro Estación.
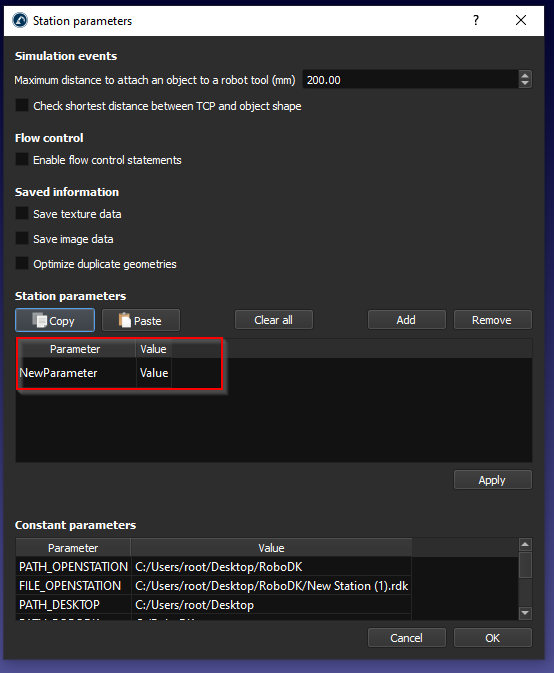
Introduzca el nombre y el valor del parámetro y pulse Aplicar para guardarlo.
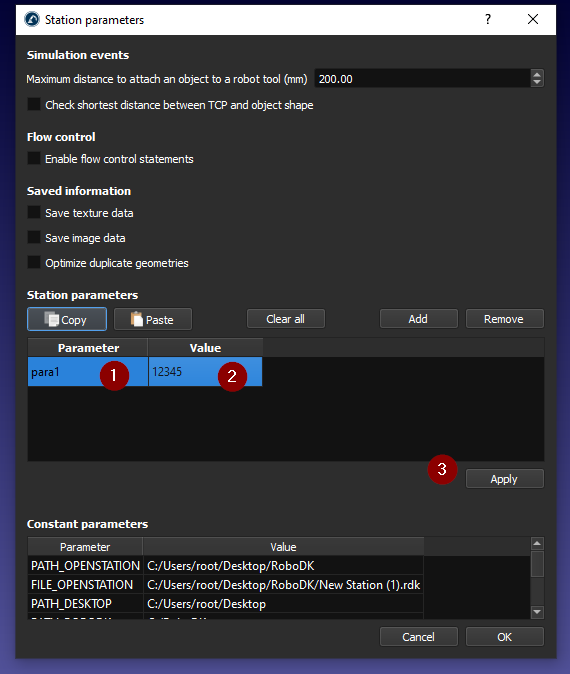
También puede obtener su propio parámetro de estación.
Tiempo
El nodo hora es un nodo que permite obtener la hora actual de la RoboDK Station.
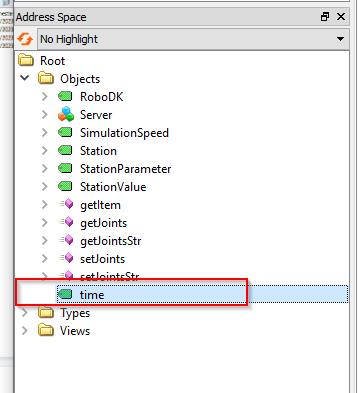
Se devuelve un valor con formato DataTime.

Y este Nodo se actualiza continuamente.

Métodos
El servidor OPC UA de RoboDK también dispone de algunos métodos que permiten al usuario acceder a los datos de la estación RoboDK de forma dinámica.
Podemos hacer clic con el botón derecho del ratón en Método>Llamada para ejecutar el método.
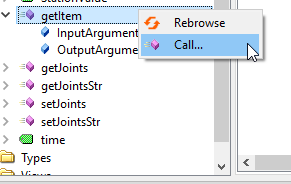
getItem
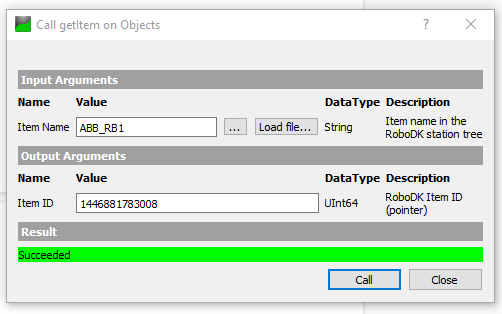
getItem es un Método que permite al usuario obtener el puntero de su Item.
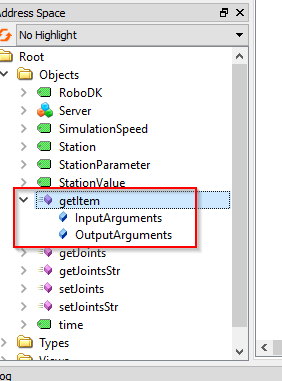
Para los InputArguments, Nombre del Dispositivo es necesario, puede imagen el Nombre del Dispositivo es el Nombre de su Estación,Nombre del Robot..etc.. Y Item ID es el OutputArguments que devuelve el Puntero de ese Dispositivo.
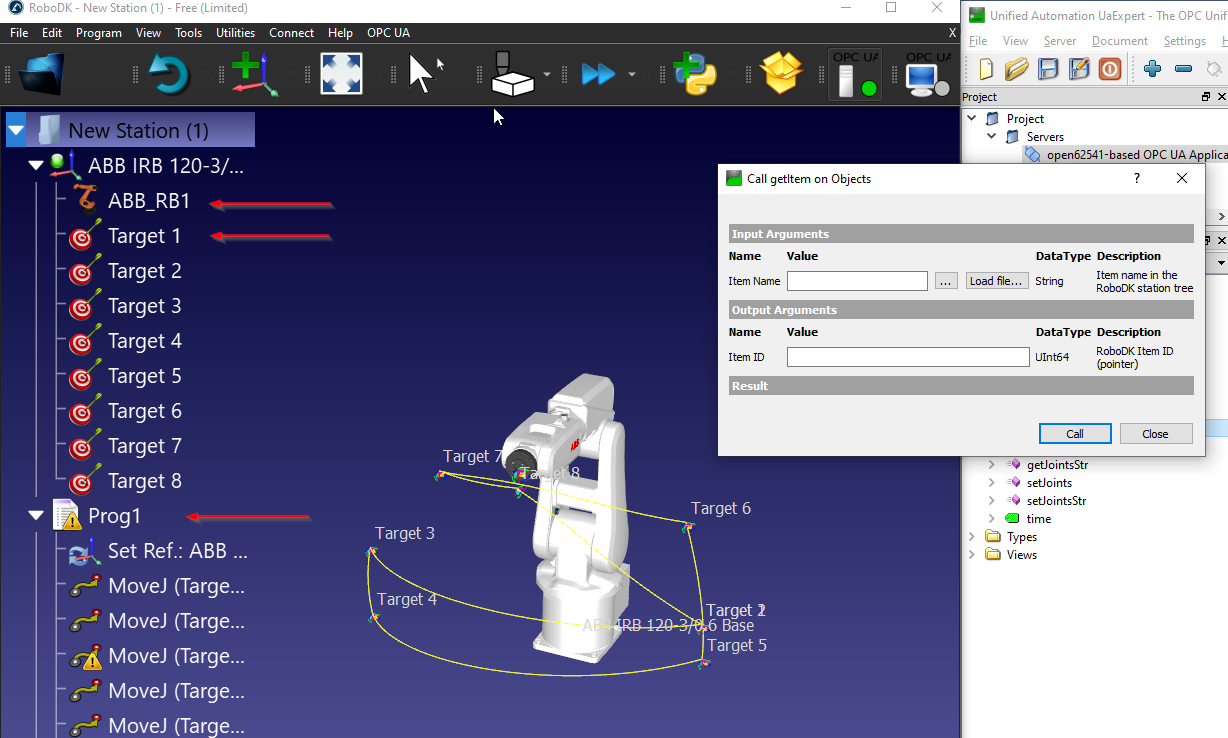
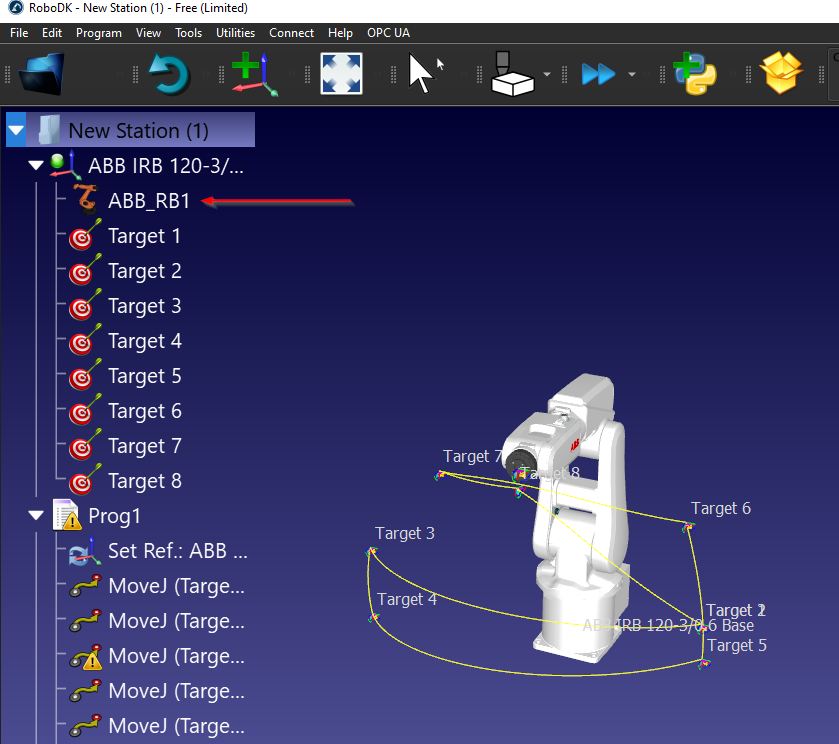
En este Ejemplo, recibí el Item ID (Puntero) de mi Robot ABB que se llama como "ABB_RB1".
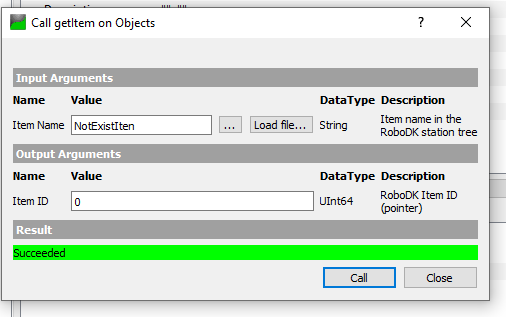
Se devuelve 0 si el Nombre del artículo no es válido o no existe dentro de su estación.
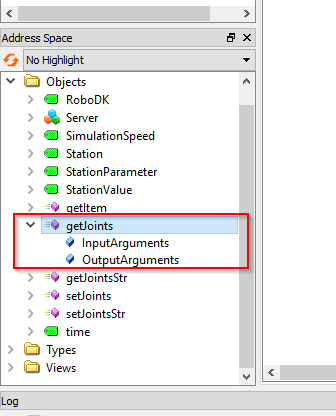
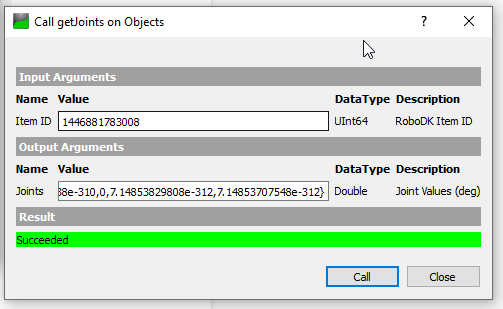
getJoints
getJonits es un método que permite al usuario obtener el valor de la articulación del robot desde la estación, basándose en el ID del elemento.
El ID del elemento es el valor del puntero de su elemento, y puede obtenerlo del método getItem().
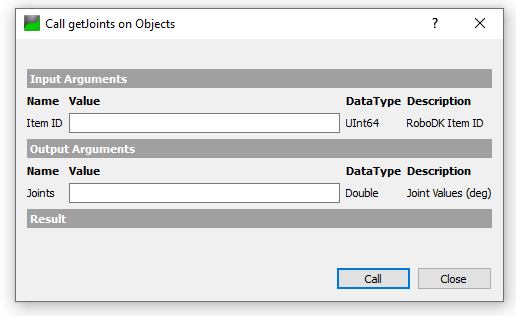
Obtendremos el ID del artículo con este nombre de artículo "ABB_RB1", y se devuelve un valor UInt64.
El valor de las juntas se devuelve al pasar el ID del artículo en el método que obtuvimos en el anterior.
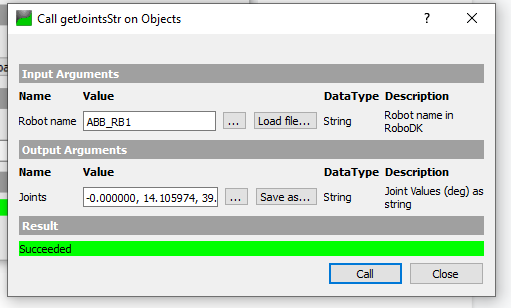
getJointsStr
getJointsStr es un método que permite al usuario obtener el valor de las Juntas basándose en un valor de cadena.
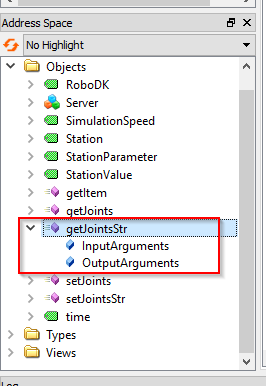
Podemos pasar el nombre del Robot (String) en este método.
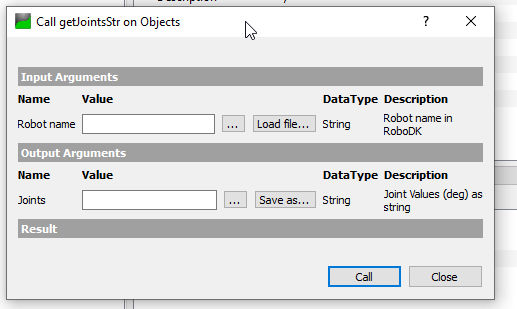
En Mi estación, ABB_RB1 es el nombre de mi robot.
Basta con pasar "ABB_RB1" en el parámetro Nombre del robot y llamar al método - Se devuelve el valor de la articulación en formato String.
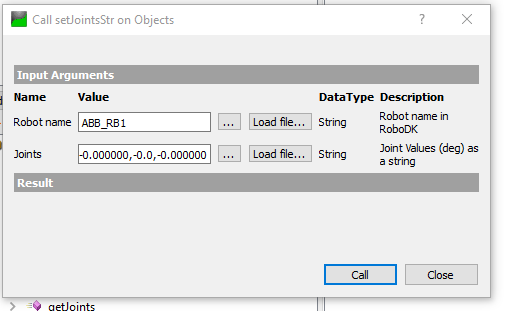
setJointsStr
setJointsStr es un método que permite al usuario establecer el valor de las Juntas del Robot, basándose en un Valor de Cadena.
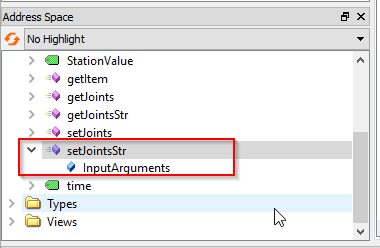
En el nombre del Robot, se pasa ABB_RB1, y podemos pasar simplemente una cadena con el valor de la articulación en el parámetro Articulaciones.
For example:-0.000000,0.000000,-0.000000,-0.000000,-0.0,-0.000000