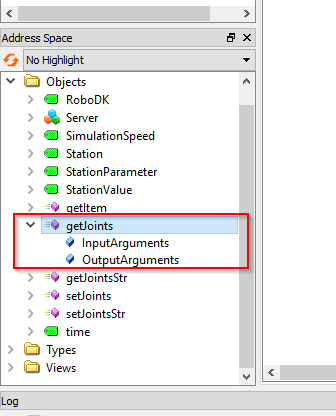
getJoints
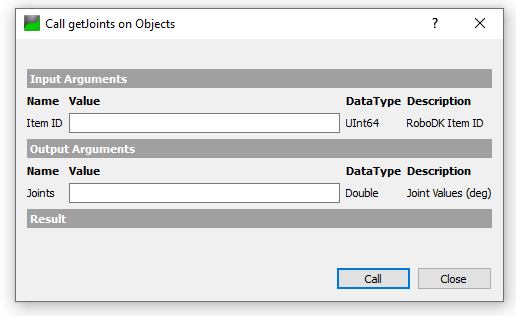
getJonits es un método que permite al usuario obtener el valor de la articulación del robot desde la estación, basándose en el ID del elemento.
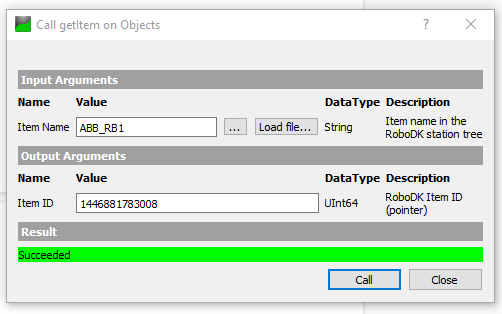
El ID del elemento es el valor del puntero de su elemento, y puede obtenerlo del método getItem().
Obtendremos el ID del artículo con este nombre de artículo "ABB_RB1", y se devuelve un valor UInt64.
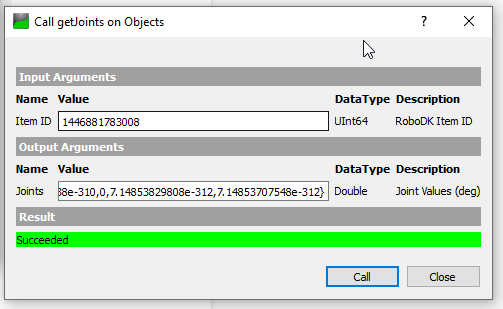
El valor de las juntas se devuelve al pasar el ID del artículo en el método que obtuvimos en el anterior.