Navigation offcanvas
- Guía Básica
- Primeros Pasos
- Interfaz
- Menú de Opciones
- Programación de Robots
- Mecanizado robótico
- RoboDK CAM
- Consejos y trucos
- Consejos Generales
- Add-ins
- Addins
- Gestor de archivos
- Palletizing
- Visión por ordenador
- Plugin del panel de visualización
- OPC-UA
- Simulación de robot realista (RRS)
- Componentes Addin
- Augmented Reality
- Addin de soldadura
- RoboDK CNC
- IO Monitor Plugin
- Addin de exportación de Blender
- IsaacSim Bridge Addin
- Game Controller
- Plugins for CAD/CAM
- Addins de RoboDK para software CAD/CAM
- RoboDK Plugin for BobCAD-CAM
- RoboDK Plugin for FeatureCAM
- RoboDK Plugin for FreeCAD
- Plugin de RoboDK para Fusion 360
- RoboDK Plugin for hyperMILL
- Plugin RoboDK para Inventor
- RoboDK Plugin for Mastercam
- RoboDK Plugin for MecSoft
- Addin de RoboDK para Onshape
- Plugin RoboDK para Rhino
- Plugin de RoboDK para Siemens Solid Edge
- Plugin de RoboDK para SolidWorks
- Detección de colisiones
- Examples
- Robot Tips
- Post procesadores
- Realidad virtual
- API de RoboDK
- Controladores de Robot
- Accuracy
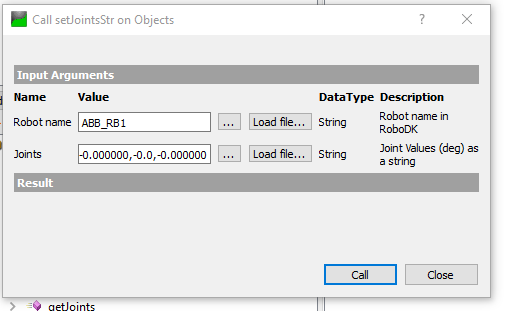
setJointsStr es un método que permite al usuario establecer el valor de las Juntas del Robot, basándose en un Valor de Cadena.
En el nombre del Robot, se pasa ABB_RB1, y podemos pasar simplemente una cadena con el valor de la articulación en el parámetro Articulaciones.
For example:-0.000000,0.000000,-0.000000,-0.000000,-0.0,-0.000000