OPC-UA
Habilite el Addin OPC-UA -in
Este documento le mostrará cómo puede añadir conectividad OPC-UA a RoboDK. Una conexión OPC UA le permite interactuar con PLC y otros dispositivos compatibles con este protocolo. Debe activar el Addin OPC-UA en RoboDK para añadir funciones de servidor y cliente OPC UA a sus proyectos.
RoboDK incluye un Addin OPC-UA que le permite añadir compatibilidad OPC UA a sus proyectos RoboDK.
Por defecto, RoboDK tiene desactivado el Addin OPC-UA. Una vez habilitado, el Addin debería aparecer cada vez que inicie RoboDK.
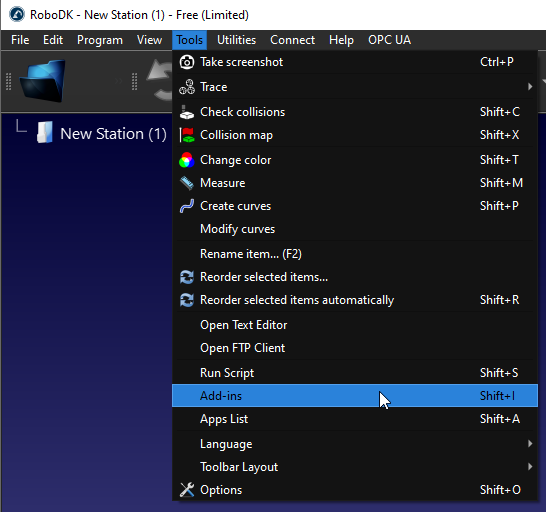
Puede habilitar el Addin OPC UA siguiendo estos pasos:
1.Seleccione Herramientas-Add-ins.
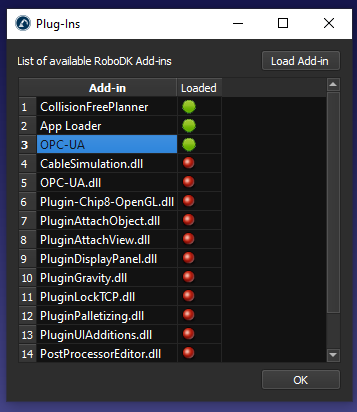
2.Haga doble clic en OPC-UA.
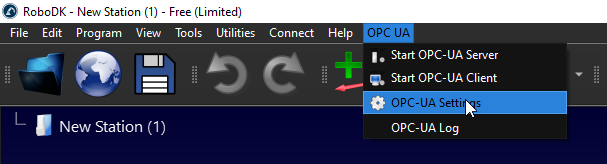
Debería ver una barra de herramientas adicional con las funciones OPC-UA.
Debería ver el botón OPC-UA en la barra de herramientas y también la entrada OPC-UA en el menú.
Servidor OPC UA Ejemplo
En este ejemplo aprenderá a habilitar el Addin OPC UA y convertir RoboDK en un servidor OPC UA. Examinaremos algunos ajustes utilizando el software UaExpert y Beckhoff TwinCAT3 TF6100.
Configure su servidor OPC UA
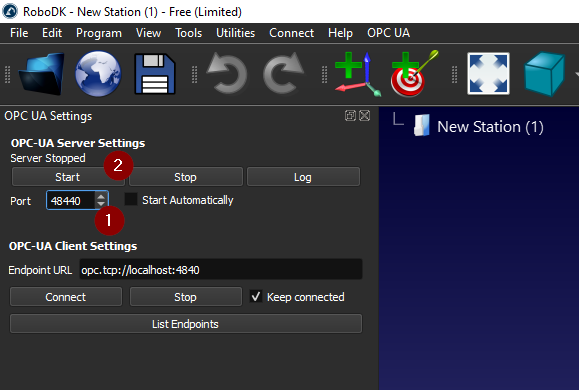
El Addin OPC UA le permite configurar algunos parámetros, como el puerto del servidor. También puede optar por activar el servidor, desactivarlo o iniciarlo automáticamente con RoboDK.
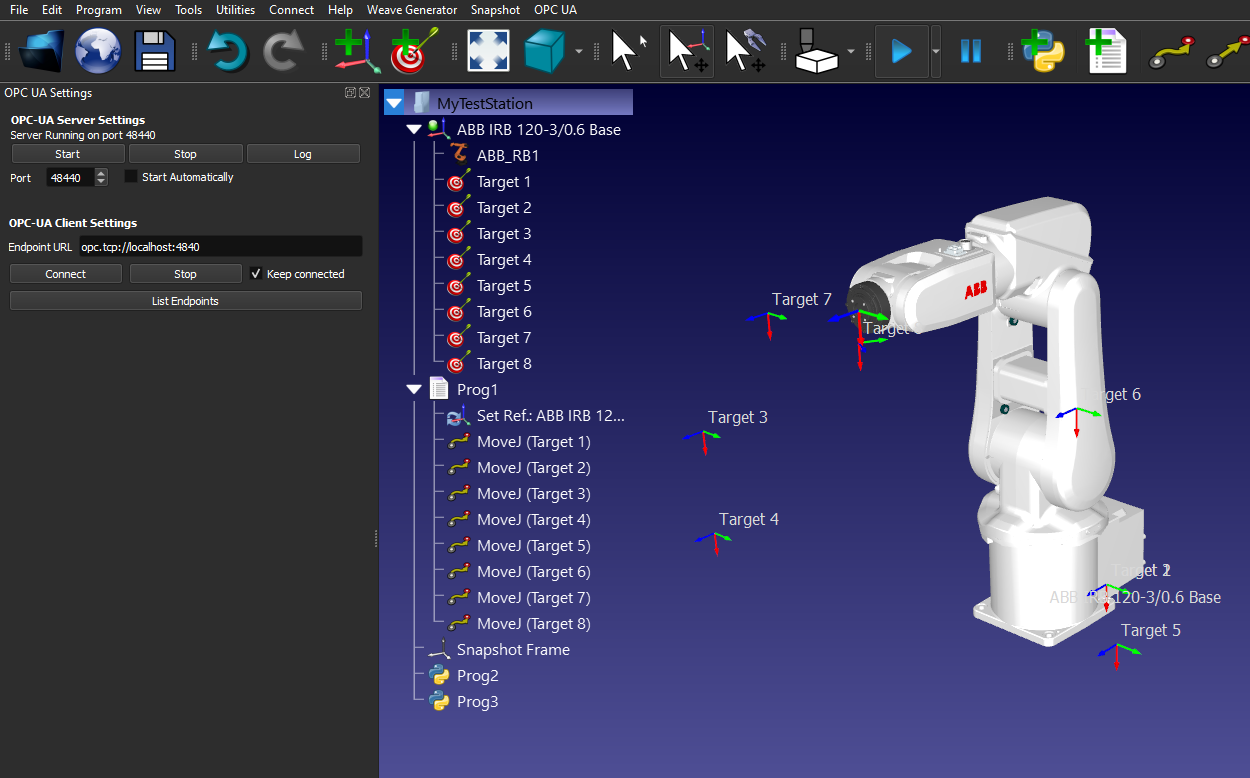
Con el Addin OPC UA activado, seleccione Ajustes OPC UA-OPC-UA para configurar sus ajustes OPC UA.
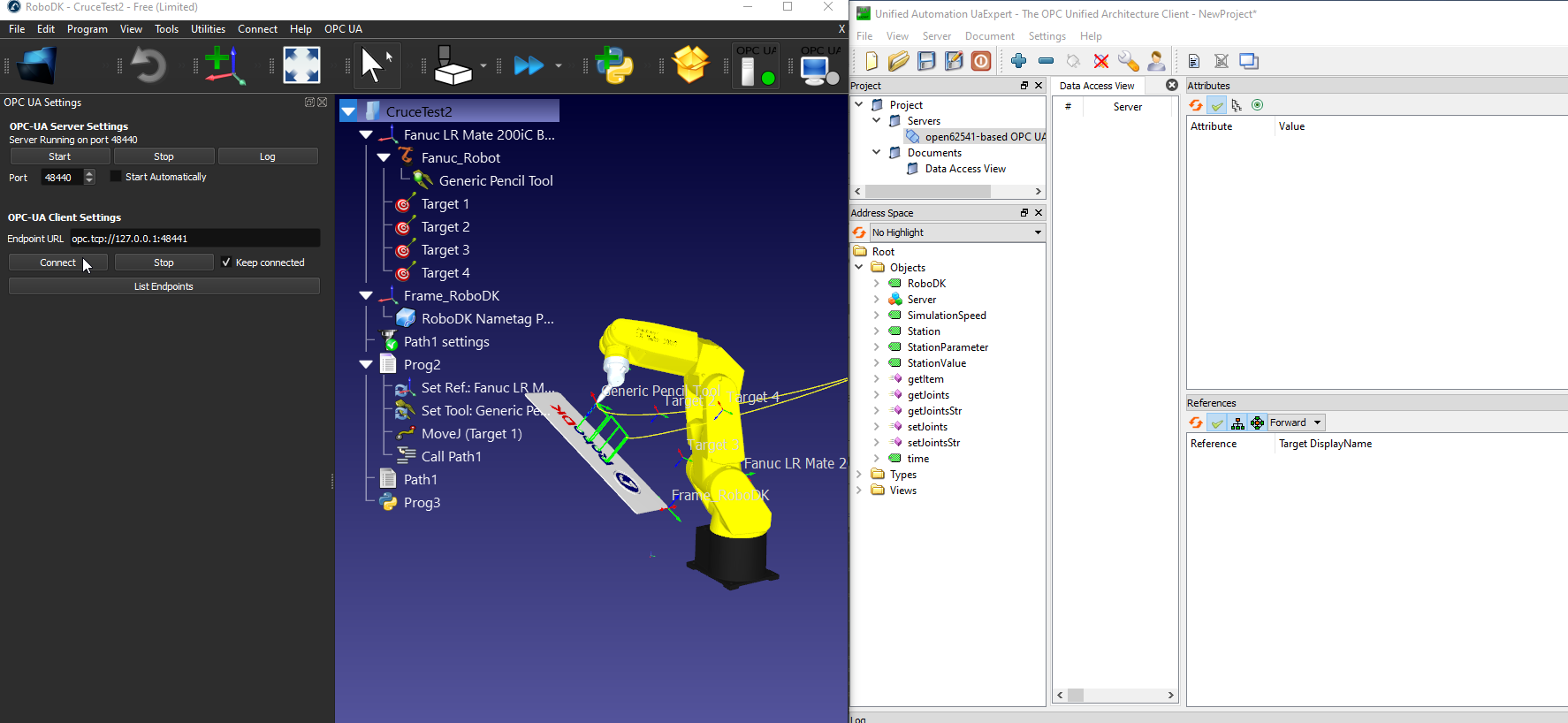
La pantalla de configuración de OPC UA se muestra en el lado izquierdo como se muestra en la siguiente imagen.
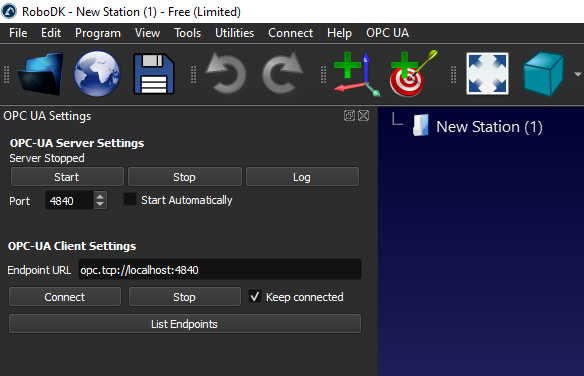
Si ve un mensaje como "Servidor OPC UA de RoboDK ejecutándose en el puerto 4840" significa que el servidor OPC UA de RoboDK se ha iniciado.
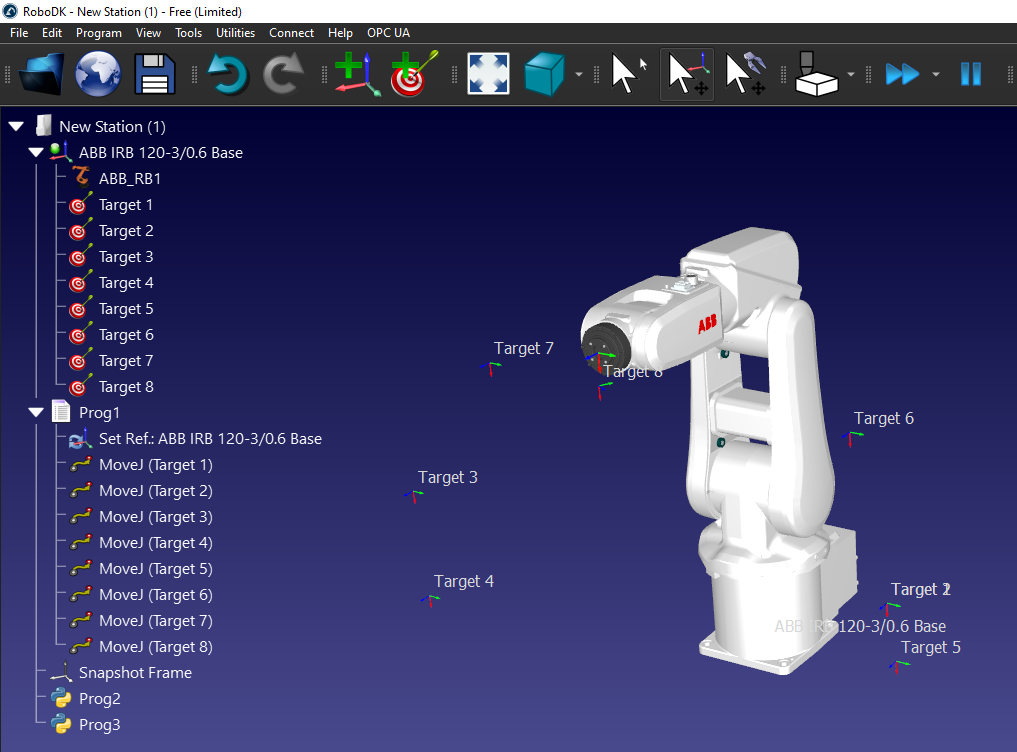
Cree su propia estación
Puede probar la conectividad OPC UA con cualquier estación RoboDK que tenga uno o varios robots.
Puesta en marcha con UaExpert
Puede utilizar el software UaExpert para probar la conectividad con el servidor OPC UA de RoboDK.
Puede descargar la versión gratuita del software UaExpert de la página web de Unified Automation: https://www.unified-automation.com/downloads/opc-ua-clients.html.
Addin UaExpert Server
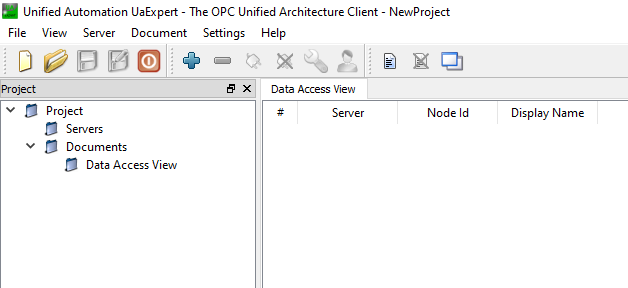
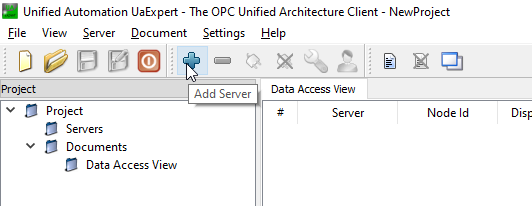
Inicie UaExpert y haga clic en el botón "+" para añadir el servidor OPC UA de RoboDK.
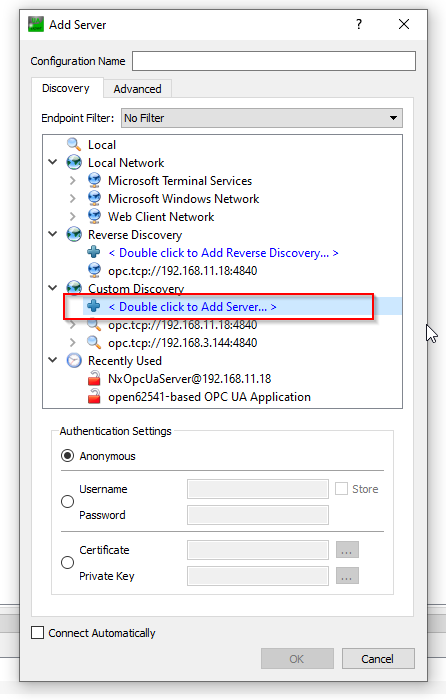
Expanda el descubrimiento personalizado y seleccione la opción <Doble clic para añadir servidor.> para añadir el servidor OPC UA de RoboDK.
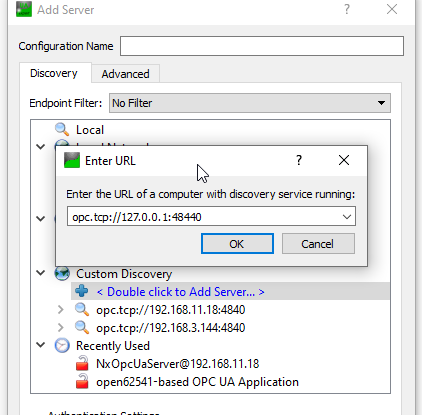
Introduzca la URL del servidor OPC UA, opc.tcp://127.0.0.1:48440 que configuró en el paso anterior.
Conecte el servidor OPC UA con seguridad "Ninguna".
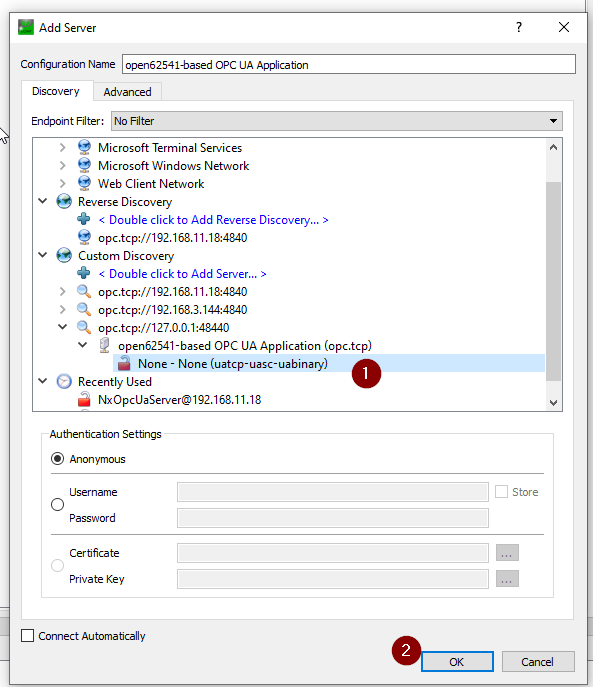
El servidor está configurado.
Conéctese al servidor
Ahora puede conectarse al servidor OPC UA de RoboDK desde UaExpert.
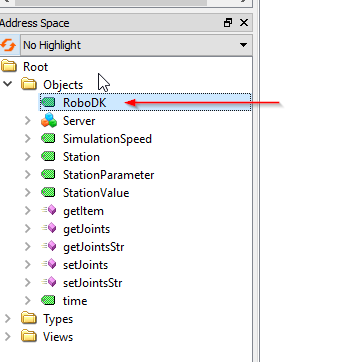
Podrá ver los Nodos y Métodos cuando se establezca la conexión.

Nodos del servidor
Existen algunos nodos dentro del servidor OPC UA de RoboDK que le permiten intercambiar información básica sobre su estación.
RoboDK
El nodo RoboDK es un nodo que proporciona la versión real de su software RoboDK.
En este ejemplo se ha utilizado la versión RoboDK 64 Bit v5.5.3.23031.

SimulaciónVelocidad
Velocidad de simulación es un nodo que muestra la velocidad de simulación actual y permite al usuario sobrescribir la velocidad de simulación actual.
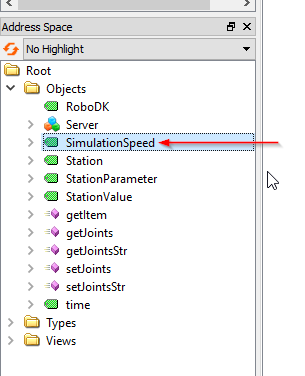
El valor del nodo está referenciado a la barra de deslizamiento de la velocidad de simulación.
La simulación actual puede leerse desde este nodo y puede sobrescribir la velocidad de simulación.

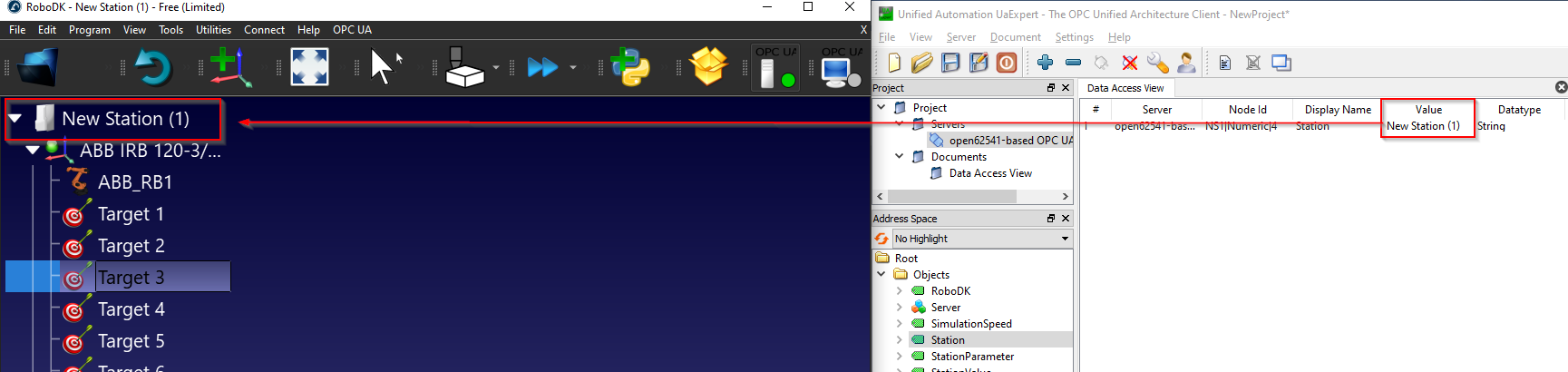
Estación
El Nodo Estación es un nodo que permite al usuario obtener el nombre actual de la Estación en RoboDK.
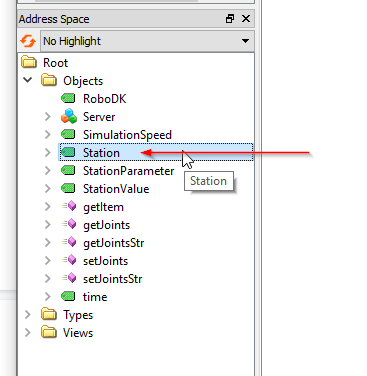
Como puede ver a continuación, el nodo Estación hace referencia a su "Nombre de estación" en RoboDK.
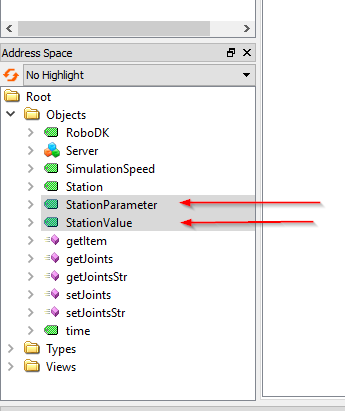
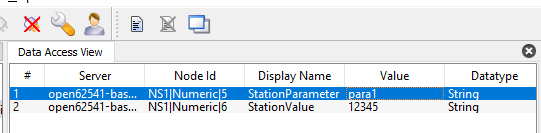
Parámetros de la estación/Valor de la estación
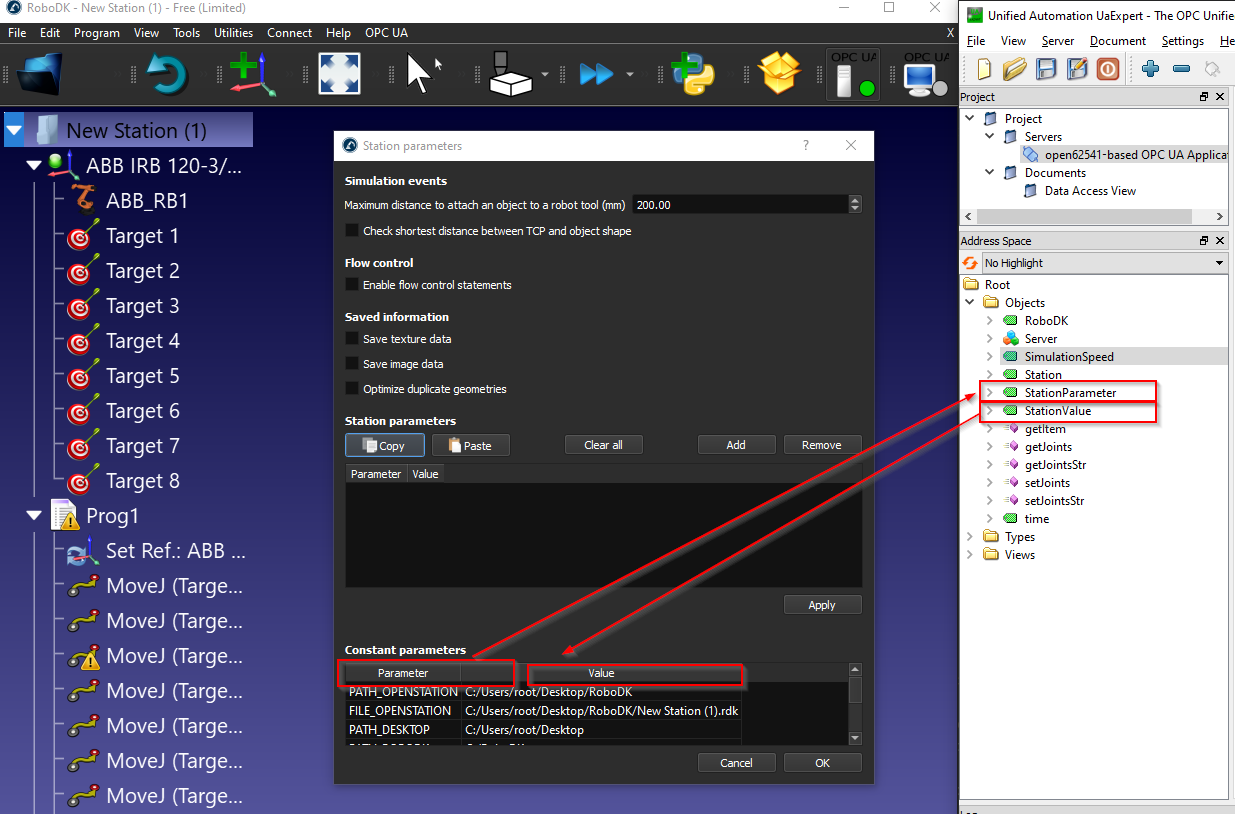
El Parámetro de la Estación y el Valor de la Estación son un Nodo conjunto de pares que permite al usuario obtener o establecer cualquier parámetro dentro de su Estación. El Servidor OPC UA de RoboDK monitorizará continuamente el valor real de "StationParameter" y devolverá el Valor de ese "StationParameter", desde el Nodo Valor de la Estación.
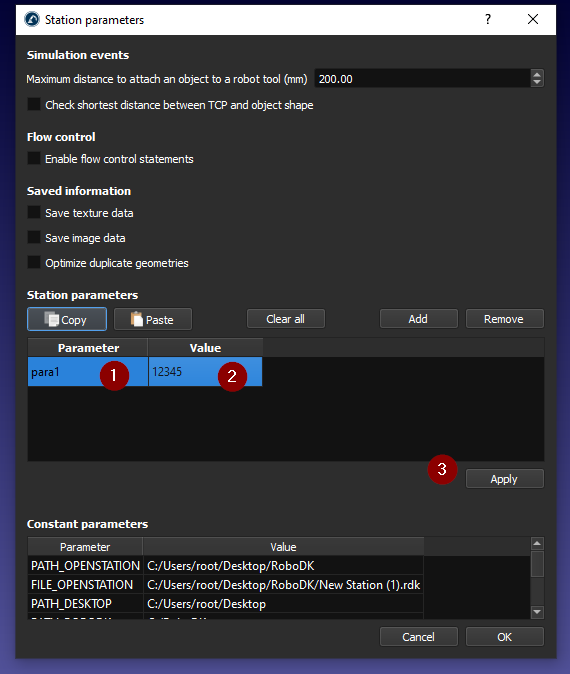
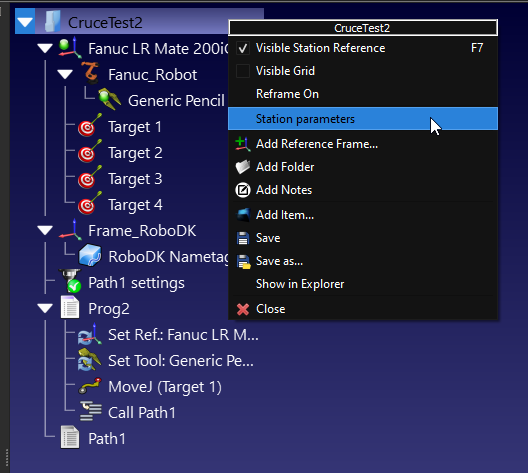
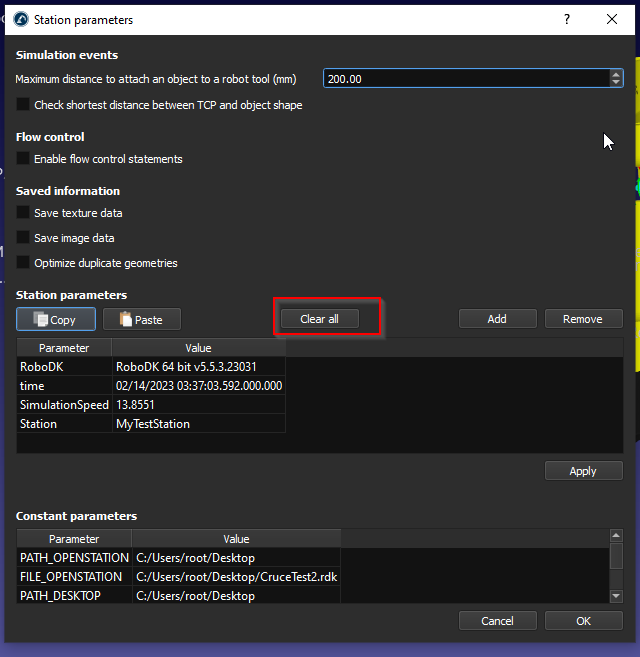
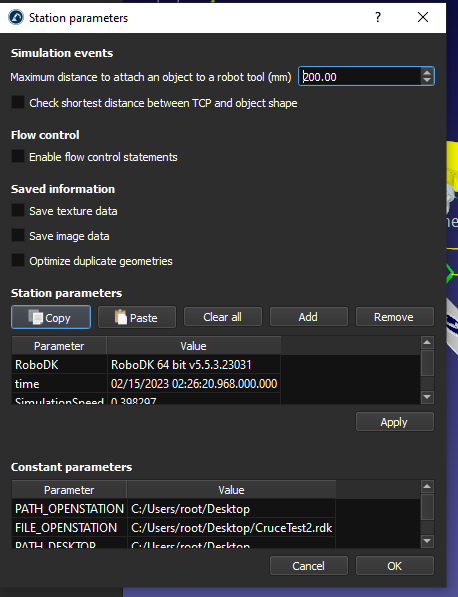
Puede ver los parámetros de su estación haciendo clic con el botón derecho del ratón en su estación RoboDK>Parámetros de la estación.
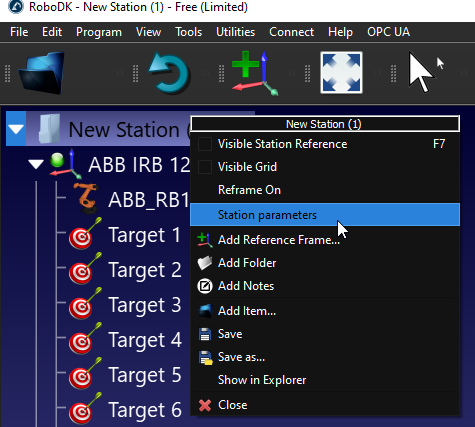
En el campo Parámetros constantes puede ver los parámetros por defecto de la estación y su valor.
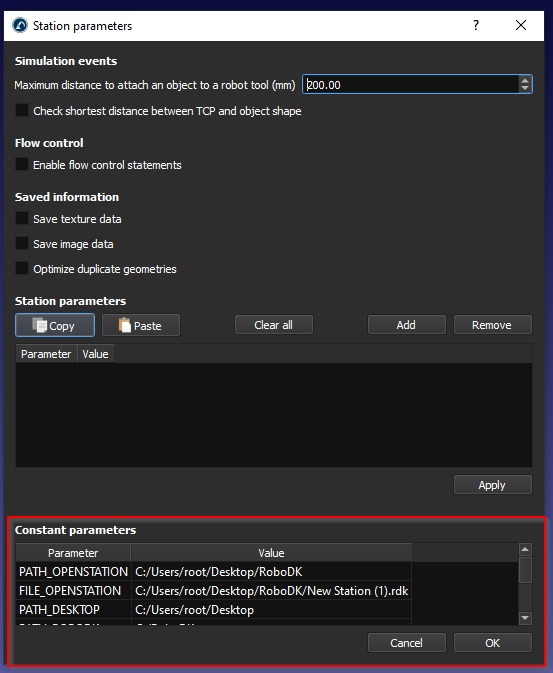
El parámetro de la estación se refiere al campo "Parámetro" y el valor de la estación al campo "Valor".
Y podemos crear nuestros propios Parámetros haciendo clic en el botón "Añadir".
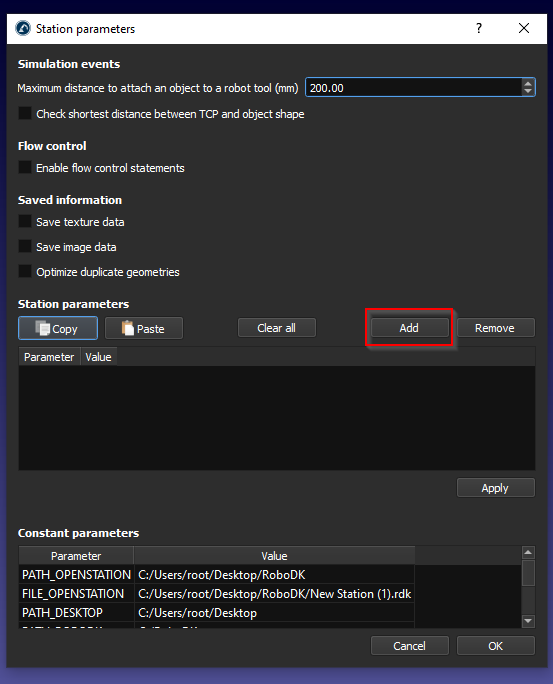
Se añade un nuevo parámetro Estación.
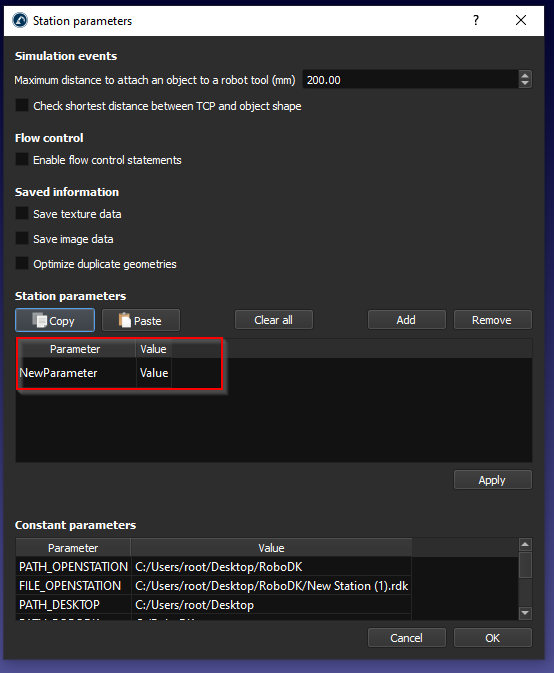
Introduzca el nombre y el valor del parámetro y pulse Aplicar para guardarlo.
También puede obtener su propio parámetro de estación.
Tiempo
El nodo hora es un nodo que permite obtener la hora actual de la RoboDK Station.
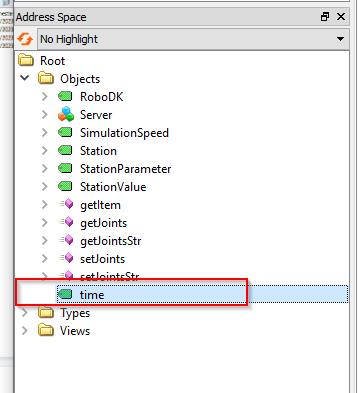
Se devuelve un valor con formato DataTime.

Y este Nodo se actualiza continuamente.

Métodos
El servidor OPC UA de RoboDK también dispone de algunos métodos que permiten al usuario acceder a los datos de la estación RoboDK de forma dinámica.
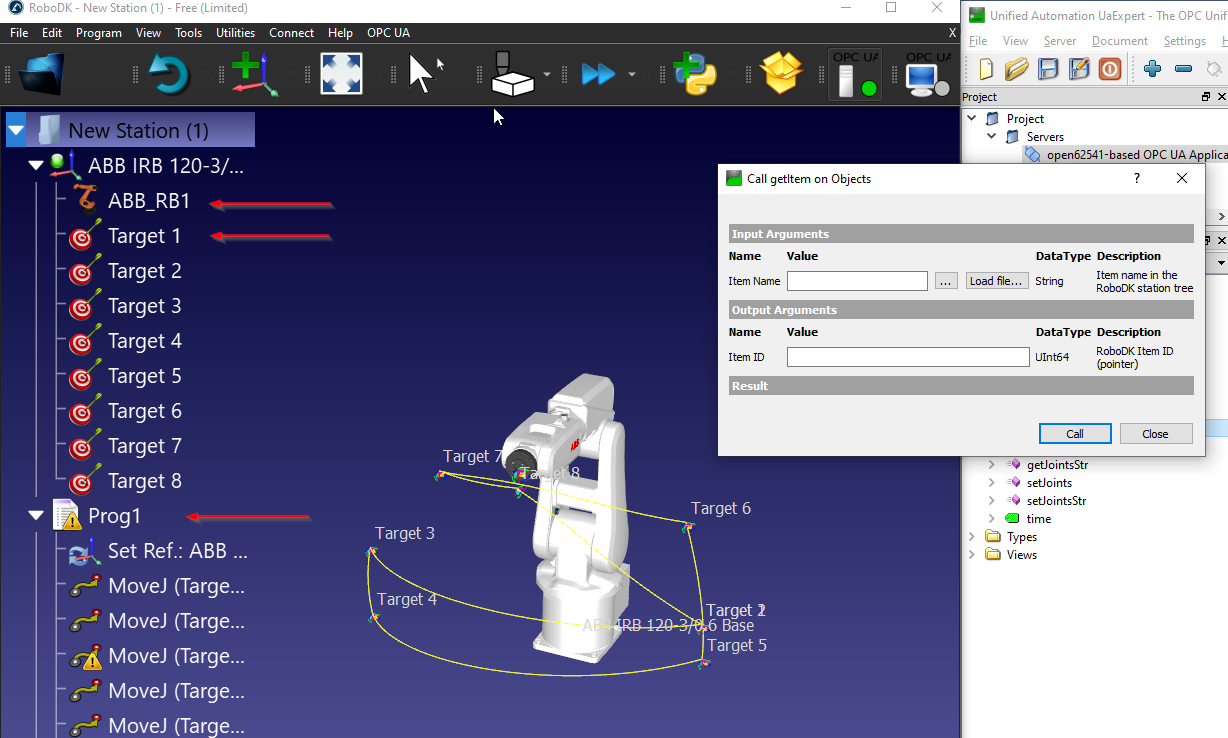
Podemos hacer clic con el botón derecho del ratón en Método>Llamada para ejecutar el método.
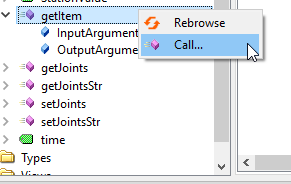
getItem
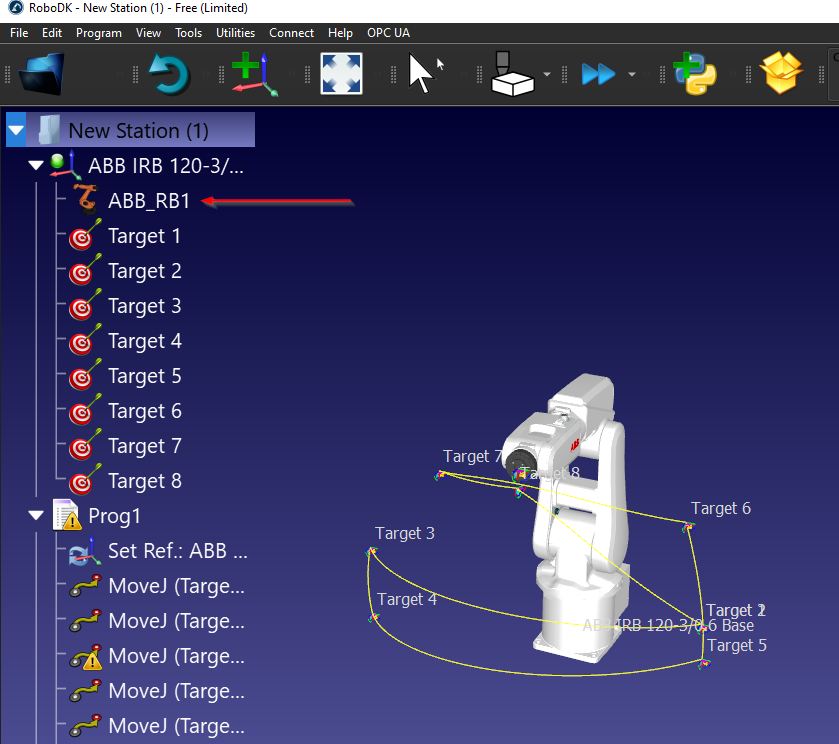
getItem es un Método que permite al usuario obtener el puntero de su Item.
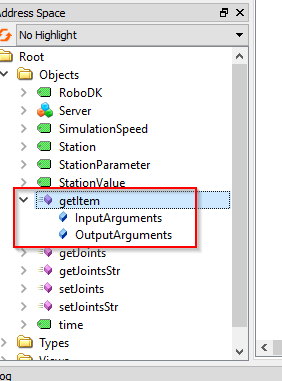
Para los InputArguments, Nombre del Dispositivo es necesario, puede imagen el Nombre del Dispositivo es el Nombre de su Estación,Nombre del Robot..etc.. Y Item ID es el OutputArguments que devuelve el Puntero de ese Dispositivo.
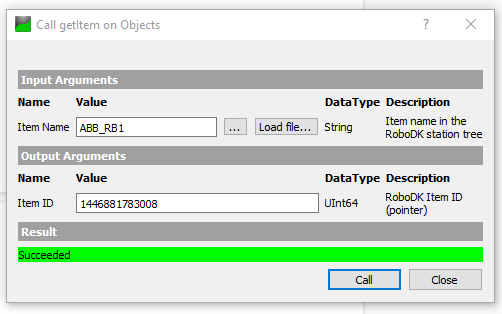
En este Ejemplo, recibí el Item ID (Puntero) de mi Robot ABB que se llama como "ABB_RB1".
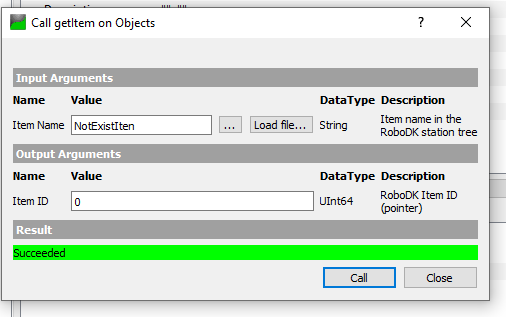
Se devuelve 0 si el Nombre del artículo no es válido o no existe dentro de su estación.
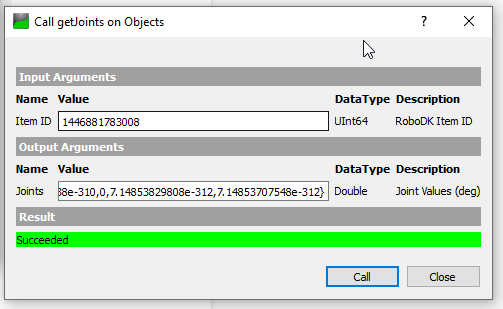
getJoints
getJonits es un método que permite al usuario obtener el valor de la articulación del robot desde la estación, basándose en el ID del elemento.
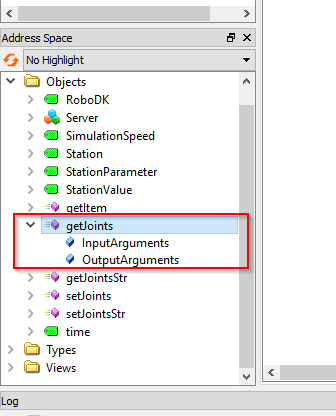
El ID del elemento es el valor del puntero de su elemento, y puede obtenerlo del método getItem().
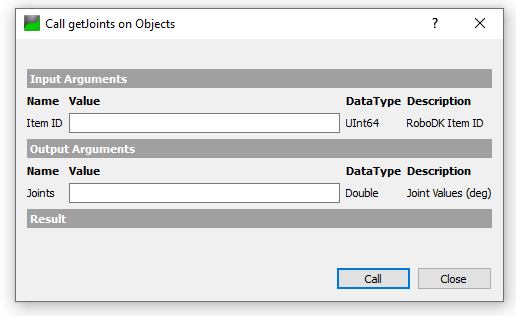
Obtendremos el ID del artículo con este nombre de artículo "ABB_RB1", y se devuelve un valor UInt64.
El valor de las juntas se devuelve al pasar el ID del artículo en el método que obtuvimos en el anterior.
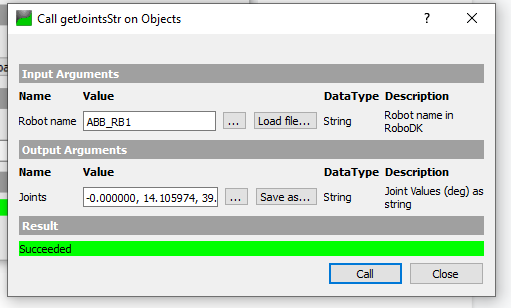
getJointsStr
getJointsStr es un método que permite al usuario obtener el valor de las Juntas basándose en un valor de cadena.
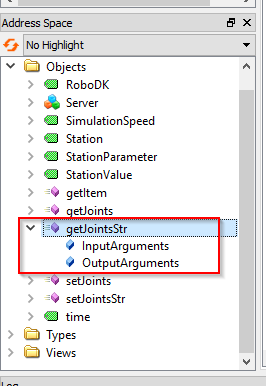
Podemos pasar el nombre del Robot (String) en este método.
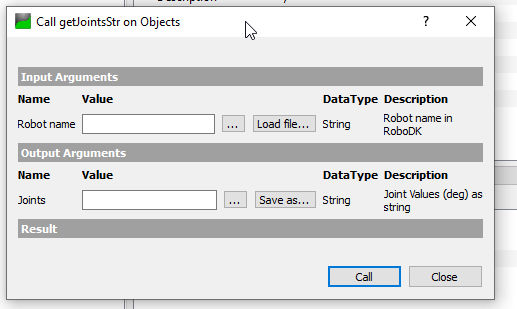
En Mi estación, ABB_RB1 es el nombre de mi robot.
Basta con pasar "ABB_RB1" en el parámetro Nombre del robot y llamar al método - Se devuelve el valor de la articulación en formato String.
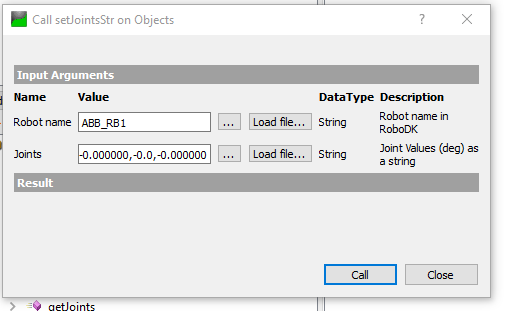
setJointsStr
setJointsStr es un método que permite al usuario establecer el valor de las Juntas del Robot, basándose en un Valor de Cadena.
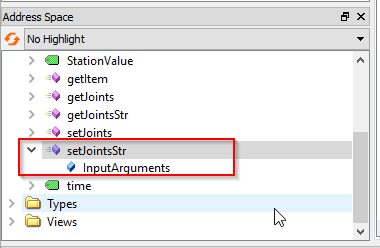
En el nombre del Robot, se pasa ABB_RB1, y podemos pasar simplemente una cadena con el valor de la articulación en el parámetro Articulaciones.
For example:-0.000000,0.000000,-0.000000,-0.000000,-0.0,-0.000000
Implementación con Beckhoff TwinCAT 3
Puede utilizar el software TwinCAT 3 de Beckhoff para probar la conectividad con el servidor OPC UA de RoboDK.
Añadir servidor TwinCAT3
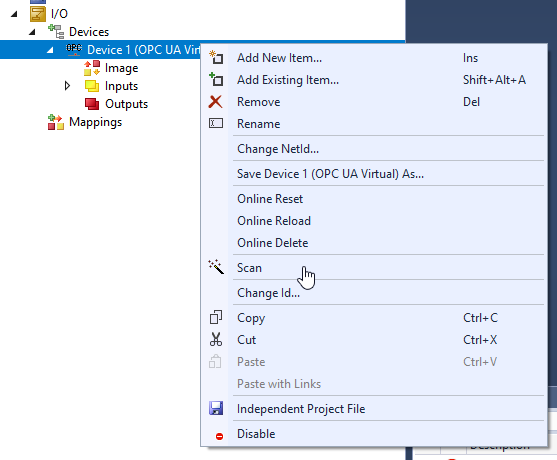
Puede empezar creando el cliente OPC UA seleccionando E/S>Dispositivos>Añadir nuevo elemento.
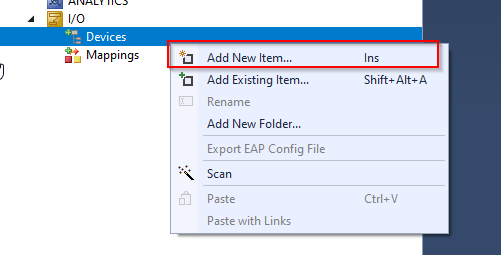
Seleccione Dispositivo OPC UA virtual de OPC >OK.
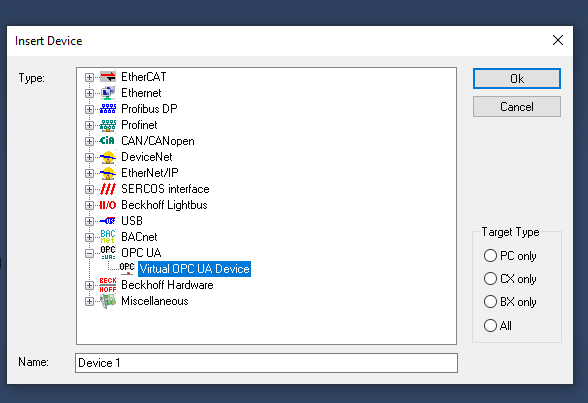
Se inserta OPC UA Virtual.
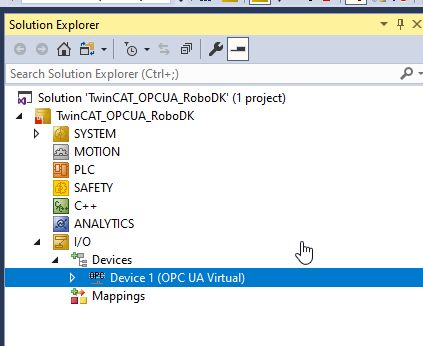
Necesitamos añadir un cliente OPC UA para acceder al servidor OPC UA de RoboDK.
Seleccione Dispositivo 1 >Clic derecho >Añadir nuevo elemento.
Seleccione "Cliente OPC UA (Módulo)" y Aceptar.
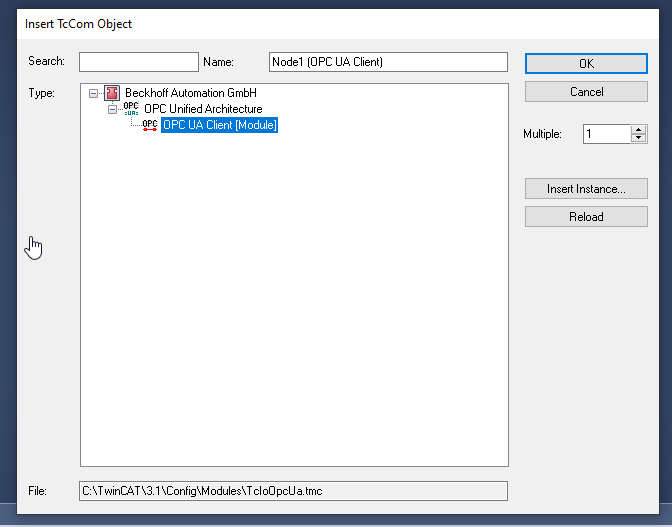
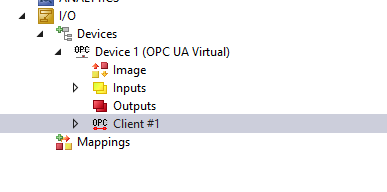
Se inserta el Cliente OPC UA.
Configurar el servidor
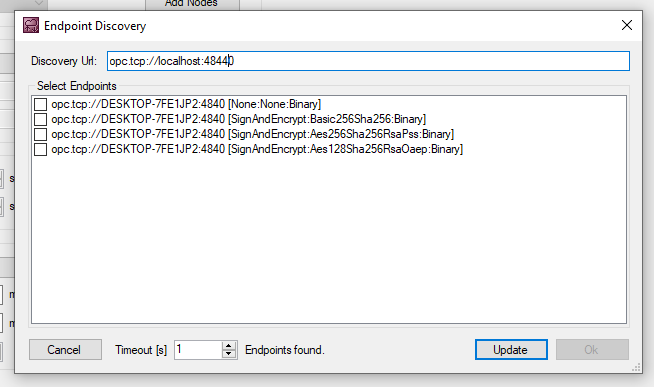
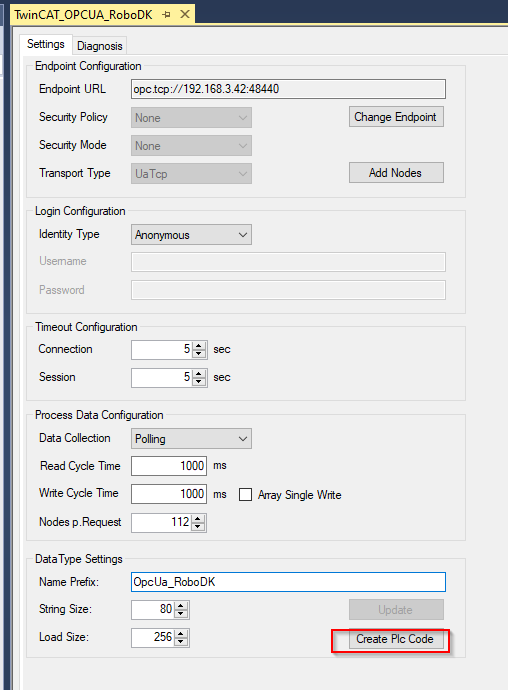
Abra el cliente OPC UA >Vaya a la pestaña Configuración>haga clic en "Seleccionar punto final" para configurar el punto final del servidor OPC UA al que desea acceder.
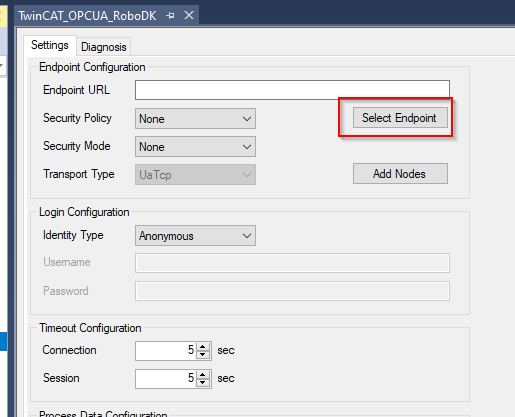
Introduzca la URL del servidor OPC UA de RoboDK y Actualícelo.
Add RoboDK Server Method
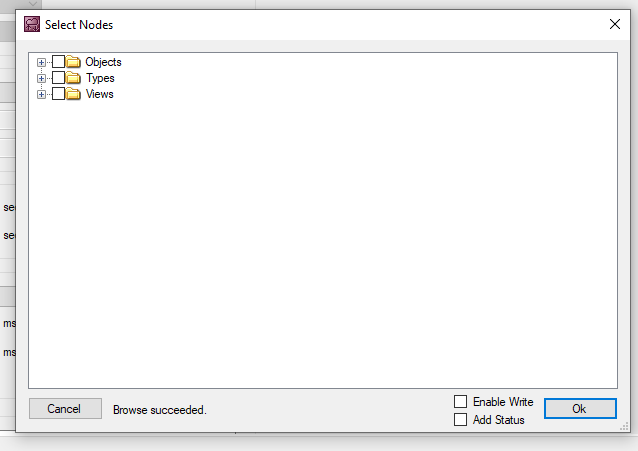
Pulse "Añadir nodos" para examinar el nodo que se encuentra dentro del servidor OPC UA.
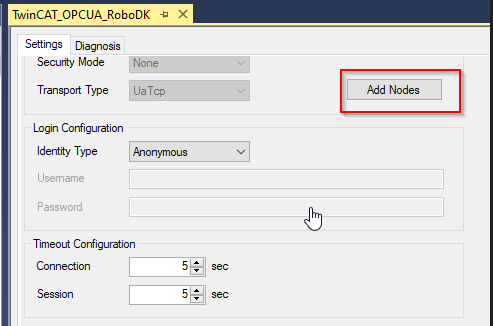
Si se establece la conexión entre TwinCAT y el servidor OPC UA, puede examinar los detalles del servidor OPC UA.
Seleccione todos los Métodos y Ok.
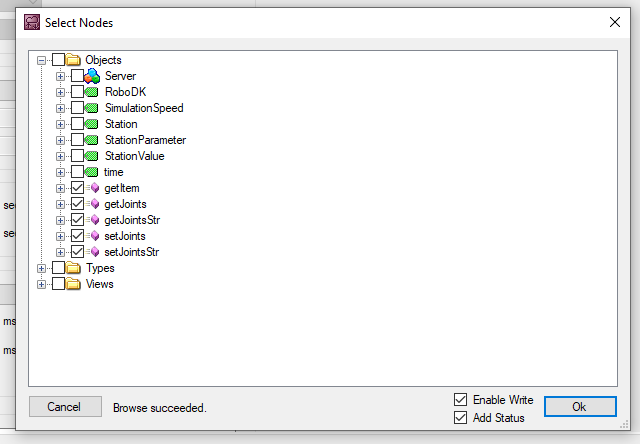
Los métodos se insertan en su Configuración.
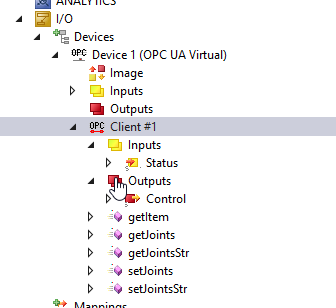
Generar automáticamente el método RoboDK
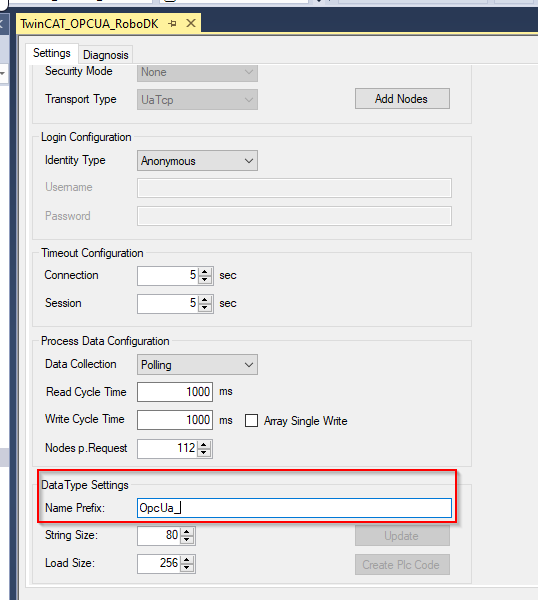
Configure el prefijo de su nombre en este campo.
Pulse "Crear Código Plc" para crear el Código PLC desde TwinCAT.
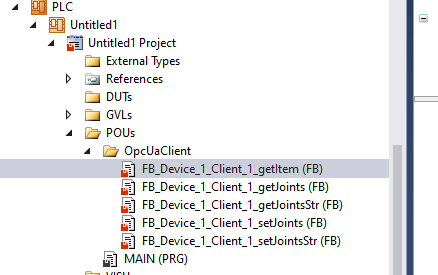
Se crea una carpeta OpcUaClient en su proyecto y todos los métodos de RoboDK se crean en formato de bloque de función IEC61131-3.
Ejemplo de programa PLC
Esta sección muestra un programa de ejemplo de un PLC TwinCAT de Beckhoff que se comunica con el servidor OPC UA de RoboDK.
PROGRAMA PRINCIPAL
VAR
bConectado :BOOL;
StationPointer :DINT;
iPaso :INT;
bStart :BOOL;;
i :INT;
TON :TON
bReset :BOOL;
bEscribir :BOOL;
TON2 :TON
bShow :BOOL:=TRUE;
bVis :BOOL:=Verdadero;
FIN_VAR
VAR
Nombre_robot :CADENA(80):='ABB_RB1';
ID_artículo :ULINT;
arrJoints :ARRAY[0..11]DE LREAL;
strJoints :CADENA(80):='';
arrJointsFromStr:ARRAY[1..11]OF LREAL;
sSeparador :CADENA(1) := ',';
arrJointsComando:ARRAY[1..11]OF LREAL;
strJointsComando:STRING(80);
FIN_VAR
VAR CONSTANTE
cStepWaitCmd :INT:=0;
cStepInit INT:=5;
cStepGetItem INT:=10;
cStepGetItemReset INT:=20;
cStepGetItemError :INT:=990;
cStepGetJoints INT:=30;
cStepGetJointsReset INT:=40;
cStepGetJointsError INT:=991;
cStepGetJointsStr :INT:=50;
cStepGetJointsStrReset:INT:=60;
cStepGetJointsStrError:INT:=992;
cStepSetJointStrDelay :INT:=69;
cStepSetJointsStr :INT:=70;
cStepSetJointsStrReset:INT:=80;
cStepSetJointsStrError:INT:=993;
cStepEnd INT:=300;
cStepWaitReset :INT:=999;
FIN_VAR
VAR
aSplit :ARRAY[1..11] OF STRING(80);
bResultadoSplit :BOOL;
depurar :BOOL;
URL :STRING:='http://192.168.3.42:8091';
FIN_VAR
bConectado:=OPCUA_VirtualClient_RoboDK_Station.bConectado;
CASO iStep DE
cStepWaitCmd:
IF bStart THEN
iPaso:=cPasoInicio;
bInicio:=FALSE;
FIN_IF
cStepInit:
PunteroEstación:=0;
FOR i :=1 TO 11 DO
arrJoints[i]:=0,0;
arrJointsFromStr[i]:=0.0;
aSplit[i]:='';
FIN_FOR
IF NOT OPCUA_VirtualClient_RoboDK_Station.getItem.bBusy
AND NOT OPCUA_VirtualClient_RoboDK_Station.getItem.bError
AND NOT OPCUA_VirtualClient_RoboDK_Station.getJoints.bBusy
AND NOT OPCUA_VirtualClient_RoboDK_Station.getJoints.bError
AND NOT OPCUA_VirtualClient_RoboDK_Station.getJointsStr.bBusy
AND NOT OPCUA_VirtualClient_RoboDK_Station.getJointsStr.bError
AND NOT OPCUA_VirtualClient_RoboDK_Station.setJoints.bBusy
AND NOT OPCUA_VirtualClient_RoboDK_Station.setJoints.bError
AND NOT OPCUA_VirtualClient_RoboDK_Station.setJointsStr.bBusy
AND NOT OPCUA_VirtualClient_RoboDK_Station.setJointsStr.bError
ENTONCES
iPaso:=cPasoGetItem;
FIN_IF
iPaso:=cPasoGetItem;
cStepGetItem:
IF OPCUA_VirtualClient_RoboDK_Station.getItem.bDone THEN
iPaso:=cPasoGetItemReset;
Item_ID:=OPCUA_VirtualClient_RoboDK_Station.getItem.Item_ID;
ELSIF OPCUA_VirtualClient_RoboDK_Station.getItem.bError THEN
iStep:=cStepGetItemError;
FIN_IF
cStepGetItemReset:
IF NOT OPCUA_VirtualClient_RoboDK_Station.getItem.bError
AND NOT OPCUA_VirtualClient_RoboDK_Station.getItem.bBusy
ENTONCES
iPaso:=cPasoGetJoints;
FIN_IF
cStepGetJoints:
IF OPCUA_VirtualClient_RoboDK_Station.getJoints.bDone
AND NOT OPCUA_VirtualClient_RoboDK_Station.getJoints.bBusy
ENTONCES
iStep:=cStepGetJointsReset;
ELSIF OPCUA_VirtualClient_RoboDK_Station.getJoints.bError THEN
iPaso:=991;
FIN_IF
cStepGetJointsReset:
IF NOT OPCUA_VirtualClient_RoboDK_Station.getItem.bError
AND NOT OPCUA_VirtualClient_RoboDK_Station.getItem.bBusy
ENTONCES
iStep:=cStepGetJointsStr;
FIN_IF;
cStepGetJointsStr:
IF OPCUA_VirtualClient_RoboDK_Station.getJointsStr.bDone
AND NOT OPCUA_VirtualClient_RoboDK_Station.getJointsStr.bBusy
ENTONCES
iStep:=cStepGetJointsStrReset;
ELSIF OPCUA_VirtualClient_RoboDK_Station.getJointsStr.bError THEN
iStep:=cStepGetJointsStrError;
FIN_IF
cStepGetJointsStrReset:
IF NOT OPCUA_VirtualClient_RoboDK_Station.getJointsStr.bError
AND NOT OPCUA_VirtualClient_RoboDK_Station.getJointsStr.bBusy
ENTONCES
iPaso:=cPasoSetJointStrDelay;
FIN_IF;
cStepSetJointStrDelay:
strJointsComando:=''; strJointsComando:=CONCAT(LREAL_TO_STRING(arrJointsComando[1]),strJointsComando);
strJointsComando:=CONCAT(strJointsComando,',');
strJointsComando:=CONCAT(strJointsComando,LREAL_TO_STRING(arrJointsComando[2]));
strJointsComando:=CONCAT(strJointsComando,',');
strJointsComando:=CONCAT(strJointsComando,LREAL_TO_STRING(arrJointsComando[3]));
strJointsComando:=CONCAT(strJointsComando,',');
strJointsComando:=CONCAT(strJointsComando,LREAL_TO_STRING(arrJointsComando[4]));
strJointsComando:=CONCAT(strJointsComando,',');
strJointsComando:=CONCAT(strJointsComando,LREAL_TO_STRING(arrJointsComando[5]));
strJointsComando:=CONCAT(strJointsComando,',');
strJointsComando:=CONCAT(strJointsComando,LREAL_TO_STRING(arrJointsComando[6]));
TON2(IN:=VERDADERO,PT:=T#0,2S);
IF TON2.Q THEN
TON2(IN:=FALSO);
iPaso:=cPasoSetJointsStr;
FIN_IF
cStepSetJointsStr:
SI (
OPCUA_VirtualClient_RoboDK_Station.setJointsStr.bDone
Y NO
OPCUA_VirtualClient_RoboDK_Station.setJointsStr.bBusy
)
OR NOT bEscribir
ENTONCES
iPaso:=cPasoSetJointsStrReset;
ELSIF OPCUA_VirtualClient_RoboDK_Station.setJointsStr.bError
ENTONCES
iStep:=cStepSetJointsStrError;
FIN_IF
cStepSetJointsStrReset:
bEscribir:=FALSE;
OPCUA_VirtualClient_RoboDK_Station.setJointsStr.bExecute:=FALSE;
IF NOT OPCUA_VirtualClient_RoboDK_Station.setJointsStr.bError
AND NOT OPCUA_VirtualClient_RoboDK_Station.setJointsStr.bBusy
ENTONCES
iPaso:=cFinPaso;
FIN_IF;
cStepEnd:
TON(IN:=VERDADERO,PT:=T#0,1S);
IF TON.Q THEN
TON(IN:=FALSE);
IF NOT debug THEN
iPaso:=10;
ELSE
iPaso:=cPasoSetJointStrDelay;
FIN_IF;
FIN_IF
cStepGetItemError:
Item_ID:=0;
iPaso:=cPasoEsperarReinicio;
cStepGetJointsError:
FOR i :=0 TO 11 DO
arrJoints[i]:=-99999.99;
FIN_FOR
iPaso:=cPasoEsperarReinicio;
cStepGetJointsStrError:
strJoints:='';
iPaso:=cPasoEsperarReinicio;
cStepWaitReset:
IF bReset THEN
iPaso:=cPasoInicio;
bReinicio:=FALSE;
FIN_IF;
FIN_CASE
aSplit[1] := strJoints;
FOR i:=1 TO 7 DO
bResultadoSplit := BuscarYSplit(
pSeparador := ADR(sSeparador)
,pSrcString := ADR(aSplit[i])
,pCadenaIzquierda:= ADR(aSplit[i])
,nTamañoIzquierda := TAMAÑO(aSplit[i])
,pCadenaDerecha:= ADR(aSplit[i+1])
,nTamañoDerecho := SIZEOF(aSplit[i+1])
,bBuscarDesdeDerecha := FALSE );
IF NOT bResultadoSplit THEN
SALIDA
FIN_IF
FIN_FOR
PARA i :=1 A 6 HACER
arrJointsFromStr[i]:=STRING_TO_LREAL(aSplit[i]);
FIN_FOR;
//
OPCUA_VirtualClient_RoboDK_Station.getItem(
bExecute:=iStep=cStepGetItem
,Nombre_del_artículo:=Nombre_del_robot
);
OPCUA_VirtualClient_RoboDK_Station.getJoints(
bEjecutar:=iPaso=cPasoGetJoints
,Item_ID:=Item_ID,Juntas=>arrJuntas
);
OPCUA_VirtualClient_RoboDK_Station.getJointsStr(
bExecute:=iStep=cStepGetJointsStr
,Nombre_robot:=Nombre_robot,Juntas=>strJuntas
);
IF bWrite THEN
OPCUA_VirtualClient_RoboDK_Station.setJointsStr(
bEjecutar:=TRUE
,Nombre_robot:=Nombre_robot,Juntas:=strComandoJuntas);
FIN_IF;
Ejemplo de cliente OPC UA
Este ejemplo le mostrará cómo puede añadir conectividad OPC-UA Client a RoboDK. RoboDK incluye un Addin OPC-UA que le permite añadir compatibilidad OPC UA a sus proyectos RoboDK.
En este ejemplo aprenderá a obtener los datos de la estación RoboDK a través del cliente OPC UA.
Aparecerá la pantalla de parámetros de la estación y pulse "Borrar todo" para borrar todos los parámetros de la estación.
Implementación con interfaz
Podemos crear un proyecto RoboDK más con el servidor OPC UA configurado e iniciado.
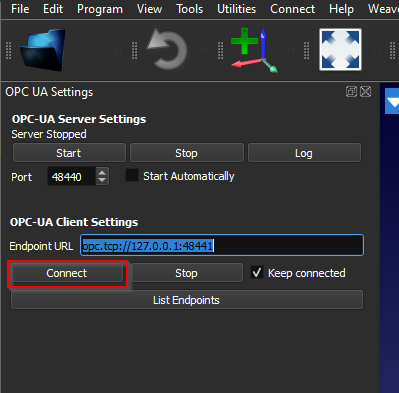
Add Client
Esta sección muestra cómo añadir un cliente OPC UA.
Introduzca la URL del punto final, por ejemplo: opc.tcp://127.0.0.1:48441.
Debe hacer coincidir la dirección IP y la configuración del puerto con su servidor OPC UA de destino.
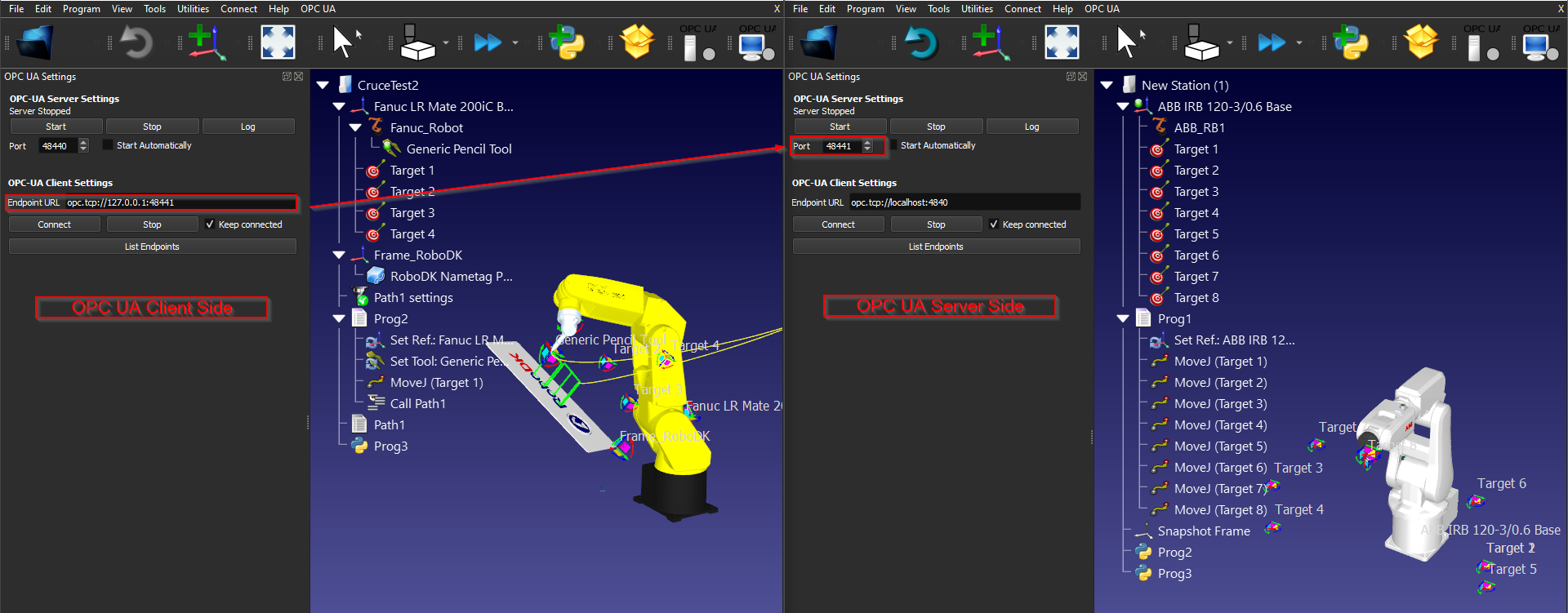
Pulse "Conectar" para establecer la conexión.
si aparece un mensaje con" Variables del servidor recuperadas. Haga clic con el botón derecho en el elemento de la estación y seleccione 'Parámetros de la estación' para ver las variables", se establece la conexión.
Haga clic con el botón derecho del ratón en su estación y seleccione "Parámetros de la estación".

Nodos cliente
Puede consultar los detalles de cada nodo en la sección de nodos.
Implementación con la API de RoboDK
Después de obtener los datos de los nodos del servidor OPC UA a través del cliente OPC UA en RoboDK, también puede obtener estos datos utilizando RoboDK-Python-API.
Instalación
Puede consultar este enlace para instalar la API Python de RoboDK.
https://robodk.com/doc/en/PythonAPI/intro.html#how-to-install
O instale manualmente el paquete robodk para Python:
pip install robodk
Script
Este script de ejemplo muestra cómo obtener los parámetros de la estación a través de la API Python de RoboDK.
from robodk import robolink # API RoboDK
RDK = robolink.Robolink()
from robodk import * # API RoboDK
from robolink import * # Caja de herramientas del robot
itemlist = RDK.ItemList()
si itemlist:
# Obtener todos los parámetros de la estación
print('Los Parámetros Vaild están configurados en su Estación..')
StationParameters=RDK.getParams()
para StationParameter en StationParameters:
print("Parámetros de estación %s : %s"%(ParámetroEstación[0],str((ParámetroEstación[1]))))
si no:
print('No hay lista de parámetros..')
He aquí el resultado del script de ejemplo:
Los Parámetros Vaild se configuran en su Estación..
Parámetros de la estación RoboDK : RoboDK 64 bit v5.5.3.23031
Hora de los parámetros de la estación : 14/02/2023 03:58:29.191.000.000
Parámetros de la estación Velocidad de simulación : 13.8551
Parámetros de la estación Estación : MyTestStation